
Fターム[3C007MS01]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | 過負荷に対するもの (98)
Fターム[3C007MS01]の下位に属するFターム
Fターム[3C007MS01]に分類される特許
1 - 8 / 8
ロボット及びロボットシステム
【課題】ロボットの制御性と安全性とを両立させる。
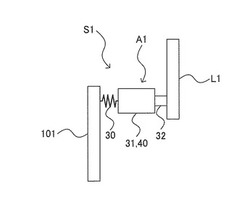
【解決手段】ロボットは、固定子31及び回転子を有するモータを関節機構S1に備えている。このロボットは、モータの固定子31が連結される第1リンク部材L1と、モータの回転子が連結される第2リンク部材と、モータの固定子31と第1リンク部材との間に設けられた弾性部材30とを有している。そして、この弾性部材30は、磁場によって弾性率が変化する可変弾性ソフトマテリアルで構成されている。
(もっと読む)
可変剛性機構及びロボット

【課題】小型の機構で安全性と制御性能を両立できるようにするとともに、最も剛性を高くした状態での剛性を非常に高くすることができる可変剛性機構及びロボットを提供する。
【解決手段】固定部材と、収縮量によってばね定数が変化する非線形ばねと、固定部材との位置を非線形ばねによって支持される支持部材と、非線形ばねに力を加えて非線形ばねの収縮量を変化させる加圧部材と、加圧部材の位置を動かすための剛性調節アクチュエータとを有し、支持部材は、少なくとも1つの突起部を備え、突起部はそれぞれ非線形ばねによって挟まれており、剛性調節アクチュエータは固定部材と加圧部材との位置を変化させる。
(もっと読む)
機械的インピーダンスの調節装置とその制御方法、該機械的インピーダンスの調節装置を用いた立ち上がり補助椅子および揺動アーム
【課題】ロボット等の機械装置において、可動部分の機械的インピーダンスを調節することの出来る、従来に無い機械的インピーダンスの調節装置とその制御方法、該機械的インピーダンスの調節装置を用いた立ち上がり補助椅子および揺動アームを提供すること。
【解決手段】駆動源22の駆動力を駆動部材14に伝達する動力伝達経路20上に、誘電体エラストマーによって形成された誘電膜30の両面に電極層32a,32bを形成した誘電体素子26を配設し、該電極層32a,32bへの印加電圧を調節することによって機械的インピーダンスを調節出来るようにした。
(もっと読む)
歩行ロボット
【課題】転倒時の衝撃力がより小さくなるように転倒中に動作を実行し、転倒による破損を抑制することができる歩行ロボットを提供することを目的とする。
【解決手段】本発明の歩行ロボット10は、歩行ロボット10が転倒するか否かを判定する判定手段と、歩行ロボットが転倒すると判定されたときに、転倒中における各脚部の駆動パターンを複数生成する生成手段と、生成された駆動パターン毎に、その駆動パターンにしたがって各脚部を駆動して転倒したときに歩行ロボット10に加わる衝撃力の予測値を算出する衝撃力算出手段と、複数の駆動パターンのうち、算出された衝撃力の予測値が最も小さい駆動パターンを選択する選択手段と、駆動パターンが選択されたときに、選択された駆動パターンにしたがって各脚部を制御する制御手段を有している。
(もっと読む)
異常検出手段を備えたロボット
【課題】ロボットに過大負荷が発生した場合にその状況を画像で記録し、原因の究明を可能とし、悪戯による場合、悪戯をした人に警告を発することを可能とすること。
【解決手段】ロボット10に通常動作をさせながら、可動アーム3あるいは走行部1等を駆動するモータが過負荷になったかを判定する。これらのモータが過負荷になると、過負荷になったモータの電流を遮断する。ついで、カメラ5により周囲の状況を撮影し、ロボットを停止させ、係員に連絡する。カメラで撮影された画像は、ロボット内に格納されるか、無線LANなどを介してサーバに転送され格納される。この画像により過負荷になった状況を確認することができ、人の悪戯によるものか、障害物への衝突や機構的な故障なのかを解析することができる。また、過大な負荷が加わった方向にカメラを向けて警告音声などを発することにより、悪戯をした人に警告することもできる。
(もっと読む)
位置決めロボット
【課題】 破損を防いでワークを協働して目標位置に位置合わせすることができる位置決めロボットを提供する。
【解決手段】 各多関節アーム30A〜30Cに設けられる各関節部Jt1〜Jt6のうちで、少なくとも1つが非駆動関節部となる。非駆動関節部が連結するアーム体は、駆動関節部に設けられるサーボモータ41によるアーム体の変位に追従して、受動的に相対変位する。ハンド部27の把持位置のずれ、アーム体の機械的誤差およびサーボ遅れなどの誤差によって駆動関節部に設けられるアーム体がずれたとしても、このずれに追従して非駆動関節部に連結されるアーム体が変位することによって、ワークなどに生じる変形力を逃すことができ、ワーク40および位置決めロボットの破損を防ぐことができる。
(もっと読む)
ロボットの歩容データ修正方法および歩行ロボット
【課題】 簡単な方法によりロボット歩行動作中に膝関節のアクチュエータの駆動回路が過負荷状態となることを回避するよう歩容データを作成する。
【解決手段】 ロボットの膝関節のアクチュエータ駆動回路が一定の値で継続的に出力可能な許容トルク指令値と、一歩行周期中にその関節が出力するトルクの平均値を比較する。平均トルク指令値が許容トルク指令値以下となるよう歩容データの補正量を設定する。このとき、一方の脚が離床する時点において、少なくともロボット重心位置をロボット進行方向に移動させるように歩容データを補正する。歩容データを補正する際に参照するパラメータを一方の脚の離床時と、ロボット重心位置のロボット進行方向の位置とに絞り込む。これにより見た目に円滑な歩行となるよう作成された歩容データを、簡単な方法でアクチュエータ駆動回路が過負荷とならない歩容データに修正することができる。
(もっと読む)
外力印加装置
【課題】 歩行中のロボットの姿勢制御能力を評価するために用いる、所定の印加パターンの外力を生成する外力印加装置を提供する
【解決手段】 枠構造体100a内のステージ105に設けたACサーボモータ104とその回転軸に設けられたモータープーリー106に一端が固定され巻き取られたワイヤ124が、センサプーリー107及びガイドプーリー108を介して引き出されたワイヤ124の他端がロボットに掛着されると共に、センサプーリー107に係止されるトルクセンサ109によりワイヤ124の張力を検出するようにしてACサーボモータ104をトルク制御し、予め設定された「経過時間−トルク」の印加パターンに倣うような外力をロボットに印加できるようにした。
(もっと読む)
1 - 8 / 8
[ Back to top ]