
Fターム[3C007XF09]の内容
マニピュレータ、ロボット (46,145) | マニュアルマニピュレータの構成、目的 (101) | 駆動機構を有するもの (14)
Fターム[3C007XF09]に分類される特許
1 - 14 / 14
医療用マニピュレータ
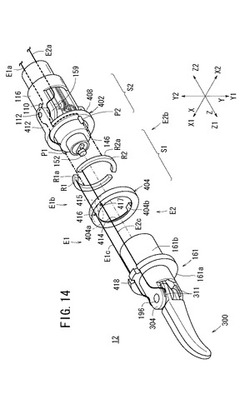
【課題】マニピュレータを電気メスとして使用する場合であっても、先端動作部での通電経路を適切に確保して、その動作や手技を円滑に行うことができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、ワイヤ80bの進退駆動によって従動回転される歯車体126等により、少なくとも軸線方向を中心とするロール方向への回転動作が可能な先端動作部12を備える。先端動作部12は、高周波電源23から、第1通電経路E1及び第2通電経路E2を介してそれぞれ通電されることにより、その間で生体に通電可能な一対のグリッパ部材308、309を有する。先端動作部12における第1通電経路E1及び第2通電経路E2は、ロール方向へと先端支持部材161と共に回転可能なスリップリングR1、R2を含む第1構造部S1と、第1構造部S1より基端側に設けられて通電ピンP1、P2を有し、ロール方向には回転しない基端部材402を含む第2構造部S2とを備える。
(もっと読む)
遠隔操作型アクチュエータ

【課題】 細長いパイプ部の先端に設けられた工具の姿勢を遠隔操作で変更することができ、その工具の姿勢変更を手元操作で容易に行える遠隔操作型アクチュエータを提供する。
【解決手段】 細長形状のスピンドルガイド部3と、その先端に姿勢変更自在に取付けられた先端部材2と、スピンドルガイド部3の基端が結合され手により保持可能な駆動部ハウジング4aとを備える。先端部材2は、工具1を保持するスピンドル13を回転自在に支持する。スピンドルガイド部3は、スピンドル13に回転を伝達する回転軸22と、ガイド孔30a内を進退して先端部材2の姿勢を変更させる姿勢操作部材31とを有する。姿勢操作部材31は、姿勢変更用駆動源で進退させる。この姿勢変更用駆動源に動作指令信号を出す姿勢変更操作具53を、駆動部ハウジング4aの外部に設ける。姿勢変更操作具53は、駆動部ハウジング4aを保持する手で入力操作可能とする。
(もっと読む)
動作治具
【課題】マニピュレータの先端動作部のロック状態を一時的に解除し、先端動作部を動かす。
【解決手段】マニピュレータの作業部16は、アクチュエータ部に着脱自在でモータの回転軸に接続されるプーリ50a〜50cを備える接続部15、及びプーリ50a〜50cに連動する先端動作部12を有する。動作治具400は、接続部15が接続されているときに、プーリ50a〜50cに接続される回転可能なノブ406a〜406cと、接続部15が離れているときにロッキングプレート304を板形状部308a〜308cに係合させ、接続部15が接続されているときにロッキングプレート304を板形状部308a〜308cから離間させるように、ロッキングプレート304を移動させるアライメントピン404a、404b、404cとを有する。
(もっと読む)
操作機構及び該操作機構を備える医療用器具
【課題】指が太い操作者や細い操作者であっても確実に操作することができ、汎用性の高い操作機構及び該操作機構を備える医療用器具を提供する。
【解決手段】マニピュレータのトリガーレバー32は、指を当てて引き方向及び押し方向に操作する操作機構であって、前記引き方向に操作する際に指を当てる引込部101と、前記押し方向に操作する際に指を当てる押出部102とを有する。押出部102は、中心軸に対して偏心した外形を有する軸部材106を備え、該軸部材106が回転され所定の回転位置で停止されることにより、前記引込部101と押出部102との間で指を入れる指入れ部である孔部100の距離Wを変更する。
(もっと読む)
汎用油圧工具の操作ユニット
【課題】1人の作業者であっても汎用油圧工具を容易に操作しながら確実に作業することができるとともに、全天候作業が可能な汎用油圧工具の操作ユニットを提供する。
【解決手段】グリップ部2に連設した操作部3に、油圧の少なくとも加圧用および加圧解除用の2種の操作スイッチ13、14と、両端が外部に開口した油路24とを設ける。絶縁操作棒4に内装した油管38の一端部を操作部3の油路24の一端部に連通接続し、汎用油圧工具1の作動油流路に、油管38の他端部を油圧用管継手52を介して連通状態に着脱自在に連結する。操作部3の油路24の他端部を、制御装置の油圧切換部にフレキシブル油圧配管31を介して連通接続する。油圧切換部を切換制御する電磁切換弁に各操作スイッチ13、14を電気配線22を介して接続する。
(もっと読む)
内視鏡装置の処置具位置制御装置
【課題】内視鏡の基端側から先端部まで挿通される処置具は、観察視野を変えた際又は患者の体腔内における生体の動きにより内視鏡が移動すると、処置中の処置具も一体的に移動されるため、処置箇所に戻す移動操作が行われている。
【解決手段】内視鏡の移動に伴い撮像された画像から対象部位に対する内視鏡本体3の動きを推定し、その動きから一体的に移動する処置具21の動きを推定する。この処置具21の移動量は、内視鏡移動後の位置から処置位置に移動させるための処置アーム部21cの各関節における屈曲、回転及び進退等の動作量を算出し、各関節を屈曲させて処置部21cを元の処置位置に移動するように、内視鏡の移動毎に処置具21の位置保持を行う処置具位置制御装置を搭載する内視鏡装置システムである。
(もっと読む)
医療用マニピュレータ
【課題】ロール回転機構の回転角度を容易に認識できるようにする。
【解決手段】マニピュレータ1102は、中空のシャフト108と、シャフト108に設けられたワイヤ52、54、56と、シャフト108の一端に設けられ、ワイヤ52、54、56の少なくとも1本によって動作し、先端を指向する軸Orを中心に回転するロール回転機構を含む先端動作部1118を備える作業部1106とを有する。ロール回転機構で相対的に回転をする基端側部材の先端側面1108aと先端側部材のカバー160のうち、カバー160には、先端側面1108aの相対的な回転の程度を示す回転程度認識手段1208を有する。先端側面1108aは、カバー160の初期の位置を示すアライメントインジケータ1210を有する。
(もっと読む)
マニピュレータ
【課題】作業部のロール動作の操作が容易で、短時間のトレーニングで操作の習得が可能なマニピュレータを提供する。
【解決手段】マニピュレータ10は、人手で把持される操作指令部14と、該操作指令部14に設けられ、指で操作される複合入力部34と、操作部から延在する連結シャフト48と、該連結シャフトの先端に設けられた作業部12とを有する。作業部12は、ヨー回動機構、ロール回転機構及び開閉機構を有する。複合入力部34は、ロール回転機構を駆動するシャトルリング100と、ヨー回動機構を駆動するパッド132とを有する。シャトルリング100は、回動部材であって、左右に設けられた2つのノブ110a、110bを有する。パッド132はシャフトリング100の内側に設けられている。
(もっと読む)
作業機構及びマニピュレータ
【課題】作業機構及びマニピュレータの可動範囲、信頼性及び操作性を一層向上させる。
【解決手段】作業部12aは、ワイヤ56が巻き掛けられる筒体116よりも前方で、回転軸が筒体116と略平行に設けられる歯車体126と、歯車体114の回転を歯車体126に伝達する第1歯車118及び第2歯車134とを有する。筒体116よりも前方でワイヤ52及びワイヤ54が巻き掛けられる巻数や被巻回体の主軸部材128や歯車体130の大きさ等は筒体116に対するワイヤ56の巻回に影響がなく、ワイヤ56を筒体116のより広い領域に巻き掛けられ、歯車体114の回転量を大きくすることができる。これにより、歯車体114の回転量を大きくすることができるため、歯車体126の回転量及び回転トルクを大きく設定できる。
(もっと読む)
マニピュレータ
【課題】把持力が増大され、把持作動時にオフセット動作が生じないマニピュレータを提供する。
【解決手段】このマニピュレータ作業部では、少なくとも第1のエンドエフェクタ部48aと第2のエンドエフェクタ部48bとが最大限閉じられた場合に、第3の関節軸O3と第1の関節軸O1との間の距離が第1の関節軸O1と第2のエンドエフェクタ部48bの先端部との間の距離よりも大きいか、第3の関節軸O3と第1の関節軸O1との間の距離が第3の関節軸O3と第2の関節軸O2との間の距離よりも大きいか、第3の関節軸O3から第1の関節軸O1へと向かう方向と第3の関節軸O3から第2の関節軸O2へと向かう方向とのなす角度がπではないか、の内の少なくともいずれかが成立する。
(もっと読む)
医療用マニピュレータ
【課題】洗浄性、滅菌性を簡単な構造により確保することで、安全性を向上させること、
【解決手段】内部に中空部242が形成された構造体と、この構造体に設けられ上記構造体の外側から上記中空部内へ流体を導入するための洗浄ポート243と、上記中空部に形成された第1の凹部を有する軸受部261cと、前記第1の凹部の外周部から外側に突き出して形成された第2の凹部を少なくともその一部に有し、上記中空部に設けられ、上記洗浄ポートから流入する流体を前記軸受部に導入する洗浄流路247と、前記軸受部に回転可能に支持された回転部と、患部に挿入するための処置部と、前記回転部の動力を前記処置部に伝達するための動力伝達部材と、前記回転部を回転させるための動力源と、前記動力源を制御するための制御部と、前記制御部に制御指令を入力するための入力部と、を備えていることを特徴とする医療用マニピュレータ。
(もっと読む)
マニピュレータ装置
【課題】処置部の位置決め操作と姿勢決めの互いの操作による干渉の影響が少なく、操作性、信頼性、安全性の高いマニピュレータ装置を提供すること。
【解決手段】アーム部231の先端側に設けられ、処置具213をピッチ軸廻り及びヨー軸廻りに回動自在に支持する作業部210と、アーム部231の基端側に設けられた操作部220と、アーム部231内に設けられ、操作部220における操作力を作業部210に伝達する駆動力伝達部とを具備し、操作部は、その軸方向がアーム部231の中心軸Qに軸方向に交差するように配置されるとともに、アーム部231の基端側に取り付けられたブラケット221に対し操作桿軸P廻りに回転自在に支持された操作桿222と、操作桿222に設けられ、処置具213の処置動作、ピッチ軸廻り及びヨー軸廻りの回動動作を行わせるための操作デバイス223を備えている。
(もっと読む)
マニピュレータ
【課題】処置部の自由度が高いマニピュレータを一段と簡易な構成によって提供する。
【解決手段】処置対象に対して処置を行う処置部(作業部10)を先端に有する連結部40の長手方向に沿った方向に対して直交する回動軸16と、回動軸16回りに回動自在に支持され、回動軸16に対して直交する主軸部20bを有する主軸部材20と、回動軸16回りに回動自在に支持される歯車17と、回動軸16回りに回動自在に支持される歯車18と、歯車17と直交して噛み合い、回動軸16からオフセットした位置で主軸部20b回りに回動自在に支持される歯車22と、歯車18と直交して噛み合い、回動軸16からオフセットした位置で主軸部16回りに回動自在に支持される歯車23と、歯車22とともに回動する処置部材11と、歯車23とともに回動する処置部材12とを備える。
(もっと読む)
電動ピンセット
電動ピンセット1は、モータ52を収納するケース部60と、ケース部60に一端部が連結固定され、他端部13gが往復の並進変位量に基づいて先端の開閉量を拡大すると共に、被対象物を開放及び把持するフィンガー13と、モータ52を回転及び停止させるスイッチ57と、ケース部60に収納され、モータ52の軸52aに連結されると共に、モータ52の一方向の回転を、他端部13gに対して所定の往復方向の並進変位量に変換する変換機構30と、を備えたものである。  (もっと読む)
(もっと読む)
1 - 14 / 14
[ Back to top ]