
Fターム[3C269QE16]の内容
数値制御 (19,287) | 表示内容、監視、記録内容 (1,309) | 文字、数字、記号を用いて表示するもの (384) | 寸法、座標値を表示 (109) | 作業等の実行時、模擬実行時の現在値 (14)
Fターム[3C269QE16]に分類される特許
1 - 14 / 14
工作機械における回転軸回転速度のモニタ方法及びモニタ装置、工作機械
【課題】びびり振動の抑制に対して回転軸の回転速度にかかわらず最適な変動周期を表示し、短時間で容易に最適なパラメータに設定可能とする。
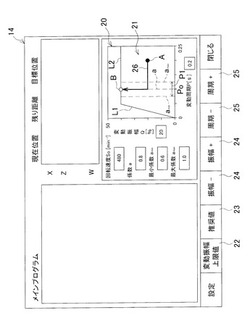
【解決手段】回転速度を変動させると、モニタ14には、回転速度の変動振幅Qと変動周期Pとの関係を示す変動図20が表示され、変動図20には、現在の設定値Aの他、変動振幅Qと変動周期Pとの設定可能範囲21と、以下の式(1)に基づいた最適変動周期PO及び/又は式(2)に基づいた変動周期Pの最適範囲P1が表示される。Tは回転軸の回転周期、a,amin,amaxは予め設定される係数である。
PO=aT ・・・(1)
aminT≦P1≦amaxT ・・・(2)
(もっと読む)
振動抑制装置

【課題】手動で回転速度を変更するに際し、容易且つ確実に安定回転速度へと変更することができ、作業者の負担を軽減することができる振動抑制装置を提供する。
【解決手段】表示装置12の表示画面12aに複数のインジケータ32、32・・からなる増速指示部31a及び減速指示部31bを設けており、回転速度を安定回転速度へと変更するに際してのダイヤル14の操作方向及び操作量を表示するようにした。そのため、作業者は、それらの表示を視認することでダイヤル14の操作方向及び操作量を容易に把握することができる。したがって、作業者にかかる負担を軽減することができるし、短時間で確実に回転速度を安定回転速度へと変更することができ、加工面精度の向上や工具の破損防止等も期待することができる。
(もっと読む)
工作機械の熱変位補正方法及び熱変位補正装置
【課題】送り軸の各位置における熱変位の分布を推定し、更に、位置検出センサを用いて送り軸の位置を検出し、検出した位置に基づいて送り軸の位置指令に対する補正量を増減することにより、周囲環境の温度変化など機械の動作によらない熱変位も考慮して補正することができる工作機械の熱変位補正方法及び熱変位補正装置を提供すること。
【解決手段】送り軸の位置を検出しメモリに格納する(SA01)。検出した位置に対応する区間(I)の、修正後の送り軸部熱変位量(LnI’)をメモリから読み出す(SA02)。修正後の送り軸部熱変位量(LnI’)を打ち消す量を熱変位補正量とし、補正手段に送る(SA03)。補正処理を行い、処理を終了する(SA04)。
(もっと読む)
振動表示装置
【課題】工作機械の振動状況を明確に把握することができる振動表示装置を提供する。
【解決手段】演算装置14において、記憶装置13に記憶されている加工条件や工具情報にもとづき、工作機械に発生するびびり振動の周波数域を推定し、びびり振動が表示装置15において明確に表示されるように、表示装置15における振動状況の表示態様を選択したり、所定の周波数近傍を拡大して表示したりするようにした。具体的には、加工条件及び工具情報にもとづいて重切削であるか否かを判断し、重切削である場合には横軸を対数とした表示態様を選択する。また、重切削でない場合には、工具情報にもとづいて工具の固有振動数を算出できたか否かを判断し、工具の固有振動数が算出されている場合には固有振動数の近傍を拡大して表示する。
(もっと読む)
工作機械のモニタ方法及びモニタ装置、工作機械
【課題】振動に係る現在の加工状態を迅速且つ容易に把握でき、最適な加工条件を効率よく導き出すことができるようにする。
【解決手段】立形マシニングセンタのモニタ装置は、加工に伴う振動を検出する振動センサと、主軸の回転を検出する回転検出器及び回転検出部と、振動センサによって検出された振動情報と回転検出器及び回転検出部によって検出された主軸の回転速度とに基づいて、回転速度と加工の安定限界との関係を表す安定限界線図及び回転速度と振動との関係を表す振動分布図をそれぞれ作成し、モニタに両図を上下に並べて表示する安定限界及び振動分布計算部とを備える。安定限界及び振動分布計算部は、現在の主軸回転速度を回転速度の軸に直交して安定限界線図F1と振動分布図F2とに跨る直線Lで表示する。
(もっと読む)
工作機械における主軸回転速度のモニタ方法及びモニタ装置、工作機械
【課題】主軸の回転速度を変動させるための設定値が容易に選択でき、びびり振動の抑制に最適な加工条件を見出すことができるようにする。
【解決手段】モニタ装置において、変動値設定部のモニタに、回転速度の変動振幅と変動周期との関係を示すグラフを表示し、そのグラフに現在の変動位置(第1点)を黒丸のマーカーで表示すると共に、所定の式に基づいてモータの変動周期の電力限界線Lを作成してグラフ上に表示して、電力限界線L以下の範囲内で、現在の変動位置よりも変動振幅が大きく、且つ変動周期が短くなる新たな変動位置を算出して、新たな変動位置(第2点)を、現在の変動位置からの変更を案内する矢印Aと共にグラフに表示する。
(もっと読む)
稼動履歴管理方法、及び稼動履歴管理装置
【課題】びびり振動の発生状況と工作機械の稼働状況とを関連づけて把握することができ、びびり振動の容易で且つ効果的な抑制を図ることができる稼動履歴管理方法、及び稼動履歴管理装置を提供する。
【解決手段】少なくとも回転軸の回転速度及び周波数領域の振動加速度を稼動履歴として記憶するとともに、当該稼動履歴を、回転軸の回転速度が変化した場合のみならず、周波数領域の振動加速度の最大値が所定の閾値を超えた場合にも記憶するため、回転軸の回転速度の変化とびびり振動の発生状況とを関連づけて記憶することができる。したがって、作業者は回転軸の回転速度とびびり振動の発生状況とを関連づけて把握することができ、ひいてはびびり振動の容易且つ効果的な抑制を図ることができる。
(もっと読む)
工作機械の運転機能制御装置
【課題】工作機械を運転する際の省エネルギーおよび安全の向上に貢献するものであり、使用者が、エネルギーおよび安全に関して最適化されるように単純な方法で異なる運転モードでの工作機械の運転を計画することができる装置を提供する。
【解決手段】主電源をスイッチオンまたはスイッチオフする装置2と、選択可能な基準に従って工作機械の運転機能のスイッチオフ時間を決定する少なくとも1つの装置3とからなる工作機械の運転機能制御装置を提供する。
(もっと読む)
工作機械の数値制御装置
【課題】手動で所望の送り機構を操作して工具を移動させたときに、手動操作した送り機構の加工位置を確実に画面表示できる工作機械の数値制御装置を提供すること。
【解決手段】作業者が手動パルス発生器の送り機構選択スイッチにより送り機構を選択すると、現在位置表示検出手段により、現在情報記憶領域が記憶している送り機構の種別情報に作業者が選択した送り機構の選択情報が含まれているか否か判断する(ステップS40)。作業者が選択した送り機構が含まれていない場合、送り機構の加工位置の座標をディスプレイに表示するとともに送り機構の選択情報及びディスプレイの表示データを現在情報記憶領域に記憶する(ステップS45)。
(もっと読む)
理論機械位置算出手段を有する数値制御装置
【課題】理論的な機械位置と実際の機械位置の差分を検出する機能を備えた数値制御装置を提供すること。
【解決手段】
機械を駆動する軸の制御と位置検出を行うサーボ制御部2へ軸移動を指令する指令部1を有する数値制御装置において、サーボ制御部2は、実際の機械位置を検出する検出手段203を備え、指令部1は、機械座標指令位置D1から、加減速による出力の遅れ量D2、およびサーボ制御部2の出力の遅れ量FBを差し引いた理論上の機械位置を算出する理論機械位置算出手段103と、理論機械位置算出手段103で算出された値D4とサーボ制御部2で検出された実際の機械位置D3との差を算出する機械位置差分算出手段104と、機械位置差分算出手段104で算出した値を予め定められた値と比較する機械位置差分監視手段106と、機械位置差分監視手段106で比較した値が予め定められた値を超えた時、軸移動を停止する手段110とワーニングを出力する手段107の少なくとも一方を備えた数値制御装置。
(もっと読む)
ロボットの動作余裕量演算表示方法及びその装置
【課題】ロボットの動作可能な領域をオペレータや生産ラインの現場作業者に対して直感的に認識できる態様で定量的に通知する。
【解決手段】ロボット1の教示プログラムに含まれる複数の教示点のそれぞれについて、ロボット1の位置姿勢を示す複数のパラメータのうちの1個又は複数個を変化させて、ロボット1の各関節θ1〜θ6の動作範囲内で教示点から連続して動作可能な領域を示す動作余裕量を計算する(ステップS2−2)。各教示点の動作余裕量を数値で定量的に表示する(ステップS2−3)。
(もっと読む)
数値制御装置の画面表示方法
【課題】数値制御装置の画面を解像度の異なる表示装置に表示する際、表示装置の画面解像度に合わせて画面を再配置して表示し、画面の視認性を向上すること。
【解決手段】数値制御装置の画面を複数の区画に分割し、各々の区画の位置と大きさ、および、使用されているフォントサイズを含む区画情報を記憶するステップと、再配置して表示する区画の位置と大きさ、および、フォントサイズを含む再配置情報を設定し記憶するステップと、表示する画面の画面番号と図形と文字の情報を含む描画データを数値制御装置から表示装置に送るステップと、画面表示プログラムで図形や文字の描画位置がどの区画内にあるかを解析し前記再配置情報に従って表示位置と図形の大きさと使用するフォントを変更して表示するステップと、からなる解像度の異なる表示装置に合わせて再配置して表示する数値制御装置の画面表示方法。
(もっと読む)
ロボット教示システム、及びこれに使用するコントローラ、教示操作端末、並びにロボット教示方法
【課題】 サーボをオフしてからロボットの可動部分が微小変位した場合であっても、サーボをオフすることにより停止した教示動作を簡易に再開することが可能なロボット教示システム、及びこれに使用するコントローラ、教示操作端末、並びにロボット教示方法を提供する。
【解決手段】 ロボット100とロボットコントローラ200と教示操作端末300とを有するロボット教示システムにおいて、コントローラ200又は教示操作端末300のいずれか一方又は双方に設けられ、ロボット100の教示動作がサーボをオフすることにより停止した場合に、その直前の位置座標Aを記憶するメモリと、教示操作端末300に設けられ、停止した教示動作を再開する契機を与える復帰スイッチ3041と、教示動作を再開する際に、ロボット100を、現在位置座標Bから位置座標Aへ復帰移動させる制御を行う復帰制御手段と、を備える。
(もっと読む)
ロボット言語処理装置
【課題】ロボット言語の表示・編集を行う際に教示装置やプログラミングペンダントに表示されるのは、従来、ロボット言語の中間コードをキャラクタ表現に変換したものだけであり、ロボットの動作を直感的に把握することができず、言語の習得に時間を要し、教示後にロボットを実際に動かして作成したプログラムの正当性を確認する必要があった。
【解決手段】グラフィカル表示が可能でありポインティングデバイスによってその表示画面中の位置を指定できる表示装置と、ロボットプログラムを格納するメモリと、ロボットプログラムを参照して、作業区間及びエアーカット区間を連続した線として表示装置に表示し、ポインティングデバイスにより表示画面に表示中のいずれかの線が指定されたときには、その線における作業内容の種類を表示画面に表示するグラフィカル言語処理部とを設け、グラフィカル・ユーザ・インタフェースに基づく教示を可能にする。
(もっと読む)
1 - 14 / 14
[ Back to top ]