
Fターム[3D232GG04]の内容
走行状態に応じる操向制御 (73,124) | 車種 (3,640) | 産業用車両 (110)
Fターム[3D232GG04]の下位に属するFターム
トレーラ(多軸操向車両) (6)
フォークリフト (56)
無人搬送車 (9)
多方向走行車両 (9)
Fターム[3D232GG04]に分類される特許
1 - 20 / 30
カウンタウエイト台車制御装置
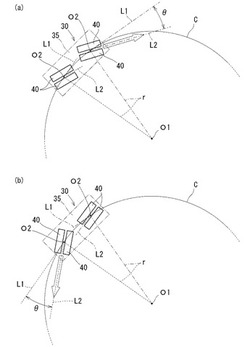
【課題】カウンタウエイト台車の旋回走行時に車輪の旋回半径が大きくなることを抑制し、クレーンの作業効率を向上させる。
【解決手段】カウンタウエイト台車制御装置1は、車輪40の操舵角度θを制御する操舵アクチュエータ50と、操舵アクチュエータ50を制御する制御手段80と、を備える。制御手段80は、上部本体20の旋回方向を判別可能な信号が入力される旋回方向入力手段81を備える。制御手段80は、平面視において、車輪40の位置における車輪40の旋回軌道Cの接線L1よりも車輪40(の前後方向前側)が内側を向くように操舵アクチュエータ50を制御する。
(もっと読む)
ステアリング装置、産業車両およびプログラム

【課題】産業車両に搭載されるステアリング装置において、ストッパーの位置関係を調整することなく、所望の旋回半径で安定的に旋回できるようにする。
【解決手段】操舵輪の操舵角が設定操舵角に到達した以降(s230「YES」)、ステアリング51への操舵トルクが制御されることで(s240)、設定操舵角を超えるような操舵輪の操舵が制限される。「設定操舵角」は、フォークリフトを所定の旋回半径で旋回させるのに適した操舵角として、設定変更可能な値であるホイルベースに応じたものが設定されるため(s220)、フォークリフトの機種などによりホイルベースが異なる場合であっても、このホイルベースを事前に設定変更しておくことにより、ホイルベースの違いに拘わらず、所望の旋回半径で安定的に旋回できるようになる。
(もっと読む)
電気式パワーステアリング装置
【課題】車両のキーOFF操作直後に発生し得るキックバックを防止するEPS装置の提供。
【解決手段】メイン回路22と、EPSモータ駆動回路21と、EPSコントローラ20とを含み、EPSコントローラは、バッテリの一端と、キースイッチを介して接続されている他、キースイッチが介挿されないEPSコントローラ給電線23によって接続されており、メイン回路は、油圧モータ及び走行モータの各駆動回路と、これらに並列に接続された平滑コンデンサと、バッテリの一端又は他端と平滑コンデンサとの間に介挿され、キーON/OFFに連動してON/OFFするコンタクタMCとからなり、キーOFFが検出された際、EPSコントローラ給電線を通じてEPSコントローラへの給電が継続されると共に平滑コンデンサの残留電荷を電源としてEPSモータが駆動されることで、キーOFF後もEPS制御を所定期間継続させ得るものとする。
(もっと読む)
安全操作用の電気油圧および手動作動式のパイロット圧力制御弁を組み合わせた運転制御システム
【課題】機械上の運転作動装置に流体を導く運転制御システムを提供する。
【解決手段】右および左の手動操作パイロット圧力流体制御弁の組30と、右および左の電気油圧(EH)パイロット圧力流体制御弁の組52とを含み、両組は、運転作動装置の操作を実行するために、主運転制御弁20に結合される。電子制御装置(ECU)70は、計算機および記憶装置を含み、制御システムの様々な操作パラメータおよび自動車対地速度を代表する信号を受信し、EHパイロット圧力制御弁52と右および左の電磁操作弁の組66とを制御する。EH弁52の故障によって、制御システム10は、最も活動的でない運転モードを実行する制御に設定するようになるが、手動制御弁30の1つまたは両方の故障によって、EH制御弁52は、手動操作弁30によって要求されるそのパイロット圧力を供給するように作動されるようになる。
(もっと読む)
アーティキュレート車両における小旋回制御装置
【課題】車両オペレータの操作体による単純な小旋回用ブレーキ操作によって左右いずれか一方の車輪ブレーキを自動的に選択しつつ、制動力は車両オペレータの手動感覚で任意に調整できるアーティキュレート車両における小旋回制御装置を提供する。
【解決手段】メインブレーキマスタシリンダ51とは別に設置した小旋回ブレーキマスタシリンダ56からハンドブレーキレバー58の操作量に応じて発生し左右の車輪ブレーキ37,38または39,40に制動力として作用する制動圧の供給を、旋回内側に対応する左小旋回制御弁62または右小旋回制御弁64のいずれか一方により制御する。左小旋回制御弁62または右小旋回制御弁64のいずれか一方は、アーティキュレート角センサからの信号によりコントローラが自動的に選択して弁開状態に制御する。車両オペレータは、制動力を実感しながら車体の安定性を保持できるように微妙な調整を行なうことができる。
(もっと読む)
車両
【課題】簡易な操作により、超信地旋回を行うことが可能な車両を提供する。
【解決手段】2つの前輪(左前輪21及び右前輪31)と、前記前輪にそれぞれ連結され、前記前輪を操舵する操舵用アクチュエータ(左前輪操舵モータ23及び右前輪操舵モータ33)と、前記操舵用アクチュエータの動作を指示するステアリングホイール62と、ステアリングホイール62の回動角θに基づいて定められる旋回中心Z周りを旋回することが可能な前記前輪の操舵角(δFL及びδFR)をそれぞれ算出し、前記前輪の操舵角が算出された操舵角となるように前記操舵用アクチュエータを動作させるコントローラ100と、を具備した。
(もっと読む)
第1および第2操舵部材を含む油圧操舵システム、ならびに油圧操舵システムを含む車両
本発明は、第1操舵部材(10)と、第2操舵部材(50)とを含み、前記第1操舵部材(10)は、第1操舵バルブを含む第1操舵バルブユニット(30)に作動可能に接続されており、優先バルブ(20)が、所望の操舵方向への前記車両(210)の操舵を提供する1つ以上の操舵シリンダー(40)への油圧液の流れを制御し、前記優先バルブ(20)は、前記第2操舵部材(50)による操舵よりも前記第1操舵部材(10)による操舵に優先を与える、車両(210)の油圧操舵システムに関する。 第2操舵バルブ(110)は、比例流量制御バルブ(120)と直列に、機能的に作動可能に設けられ、前記第2操舵バルブ(110)および/または前記比例流量制御バルブ(120)は、少なくとも前記第2操舵部材(50)によって制御される。 (もっと読む)
後輪操舵装置
【課題】自車両が備える後輪の操舵状態を制御することにより、被牽引車両の横方向への挙動を抑制することが可能な後輪操舵装置を提供する。
【解決手段】被牽引車両を牽引する自車両の後輪4を操舵する後輪操舵装置1であって、被牽引車両の横方向への挙動を検出する被牽引車両横挙動検出手段28と、被牽引車両横挙動検出手段28が検出する被牽引車両の横方向への挙動に基づいて、後輪4の操舵状態を制御する後輪操舵状態制御手段30とを備え、後輪操舵状態制御手段30は、自車両の横方向への挙動が、被牽引車両の横方向への挙動に対して逆位相または略逆位相となるように、後輪4の操舵状態を制御する。
(もっと読む)
負荷反応ステアリングシステム用遮断弁
【課題】並列ステアリング回路を有するステアリングシステムにおいて、負荷反応機構を組込む。
【解決手段】本発明のステアリングシステムは、流体アクチュエータ22と、流体アクチュエータに選択的に流体接続する電気−油圧式ステアリング回路18と、電気−油圧式ステアリング回路18に並列に配置されて流体アクチュエータ22に選択的に流体接続する油圧式ステアリング回路20とを含む。油圧式ステアリング回路20は、負荷反応機構及び遮断弁を含み、遮断弁によって負荷反応機構を有効及び無効にする。
(もっと読む)
作業車両の油圧式パワーステアリング装置
【課題】作業車両の油圧式パワーステアリング装置において、第1油圧源の圧油供給機能低下時の第2油圧源による緊急用の圧油供給機能と第2油圧源の正常作動確認機能を有し、かつそれらの両機能を製作が容易で、安価な構成で実現する。
【解決手段】主油圧ポンプ21と電動駆動の緊急用油圧ポンプ71の高圧側の圧油を選択するシャトル弁8の下流側に圧力センサ31を設置し、この圧力センサ31と、車速検出用の回転センサ32、オルタネータ(図示せず)の発生電圧を検出する電圧センサ33の検出信号をコントローラ30に入力し、主油圧ポンプ21の圧油供給機能低下時に緊急用油圧ポンプ71を動作させ緊急用の圧油供給機能を確保し、エンジン起動時に緊急用圧力ポンプ71を一時的に動作させ緊急用圧力ポンプ71の正常作動確認機能を確保する。
(もっと読む)
ホイール式の作業機械
【課題】 従来のホイール式の作業機械は、オペレータの感覚で直進操向する場合、オペレータがハンドルの操作方向を頻繁に修正する必要があった。
【解決手段】 ステアリング角度センサ16によってハンドル10の操作状態が中立位置付近にあることが一定時間検出され(S1,S2)、さらに補正範囲x内にあることが検出されると(S3)、コントローラ33は、左右の車速センサ32L,32Rが検出した左右の駆動輪7L,7Rの速度から左右の駆動輪7L,7Rの速度差を検出し(S4〜S6)、右の駆動輪7Rの速度が左の駆動輪7Lよりも速い場合には、右ステアソレノイド24Rへの通電を“ON”にし(S7)、操向輪6L,6Rの舵角を右に向ける。また、左の駆動輪7Lの速度が右の駆動輪7Rよりも速い場合には、左ステアソレノイド24Lへの通電を“ON”にし(S8)、操向輪6L,6Rの舵角を左に向ける。
(もっと読む)
車両のステアリング制御装置
【課題】 未熟練なオペレータといえども高速走行時にステアリング切り直しを行わせないようにして、タイヤの寿命向上を図る。車両の仕様を変更することなく、熟練度に応じた最適な操作性が得られるようにする。未熟練なオペレータが迅速に操作技能レベルを高めていくことができる、車両の運転教育を兼ねたステアリング制御装置を市場に提供する。
【解決手段】 判定手段20では、高速走行時にステアリング切り直し操作が行われたか否かが判定される。習熟度判別手段40では、判定手段20の判定結果に基づいて、ステアリング感度の大きさを低くするか、あるいはステアリング感度を高くするかが判別される。ステアリング感度変更手段30では、習熟度判別手段40の判別結果に応じて、ステアリング感度が変更される。
(もっと読む)
荷役車両の制御装置
【課題】荷役対象物の軽重に関わらず、荷役車両の旋回を正確に制御することが可能な荷役車両の制御装置を提供する。
【解決手段】CPUは、最初に、記憶装置に記憶されている制御プログラムに基づいて、ステアリングモータの駆動制御を開始する。次に、CPUは、後輪の操舵指示角と、ステアリングポテンショメータから与えられる後輪の現在の操舵角との差xを算出する。次いで、CPUは、算出した上記差xが、記憶装置に記憶されているしきい値よりも大きいか否かを判別する。算出した差xがしきい値よりも大きい場合、CPUはステアリングモータの回転数を上げるよう制御する。一方、算出した差xがしきい値以下の場合、CPUはステアリングモータの回転数を下げるよう制御する。
(もっと読む)
作業車両のステアリングおよび作業機の制御装置
【課題】 ステアリング制御系の応答性を向上させるとともにエネルギーロスを少なくする。しかもステアリング機構と作業機を駆動する駆動源を、共通の油圧ポンプとして、油圧ポンプの搭載スペースがかさまないようにする。またシンプルな回路構成で低コスト化を図る。
【解決手段】 分流回路30(31〜40)は、プライオリティ弁6から分流された圧油を、作業機用制御弁20を通過させて、タンク9に排出させる回路である。分流回路30には、出口側がタンク9に連通された絞り36が設けられている。分流回路30には、絞り36と並列に配置された弁であって、作業機操作信号が入力されることにより、当該弁の通路を開放するように動作するバイパス手段140が設けられている。
(もっと読む)
ハンドル角補正システム
【課題】ハンドルの回転範囲や操舵輪の操舵範囲の異なる車両に適したハンドル角補正システムを提供する。
【解決手段】操舵輪のタイヤ角検出信号に基づき、操舵輪の全操舵範囲を規定する最大値と最小値を記憶する学習部13Dと、前記ハンドルの回転位置に応じたハンドル角検出信号に基づき、操舵輪の全操舵範囲に対応する該ハンドルの回転範囲を規定する最大値と最小値を記憶する学習部13Cと備え、前記記憶した最大値及び最小値により規定される操舵輪の全操舵範囲とこれに対応する前記ハンドルの回転範囲とに基づき操舵輪の右操舵方向に関する第1の修正データと左操舵方向に関する第2の修正データとをそれぞれ求める。操舵輪の現在の操舵方向に応じた前記第1又は第2の修正データで現在のタイヤ角検出信号とハンドル角検出信号の少なくとも一方を修正し、該タイヤ角検出信号とハンドル角検出信号との偏差に応じて、操舵輪の操舵を補正する。
(もっと読む)
作業車両のステアリングシステム
【課題】ステアリングホイールの回転操作を小さな力で行うことができるとともに、運転状況に応じて、ステアリングホイールの回転操作に対するステアリングシリンダの駆動速度を変えることができ、かつ万一、電気系統に故障が生じても、作動車両のステアリング動作を確実に行うことができ、安全性の高い作業車両のステアリングシステムを提供する。
【解決手段】油圧ステアリングユニット5をステアリングバルブ4の操作系として構成し、車速センサ31を設け、コントローラ32、電磁弁33、パイロット油路29、プライオリティバルブ7の受圧部24cからなる制御手段により、車速が増加するにしたがってプライオリティバルブ7の設定手段(バネ25と受圧部24c)に設定される値を小さくするよう制御する。
(もっと読む)
作業車両のステアリングシステム
【課題】走行とフロント作業機の同時操作と単独走行のそれぞれにおいて車輪ステアリング速度を最適な値とし、作業効率と安全性を確保し、かつ操作性を向上させる。
【解決手段】油圧ステアリングユニット5は、パイロットポンプ13の圧油に基づいてステアリングホイール109の回転量と回転方向に応じた制御圧力を発生し、この制御圧力を検出する圧力センサ6a,6bの信号とフロント操作検出装置31の信号がコントローラ132に入力される。コントローラ32及び電磁弁33a,33bは、圧力センサ6a,6bによりそれぞれ検出した制御圧力が増加するにしたがってステアリングバルブ4のストロークを大きくするとともに、フロント作業機の操作を検出したときは、フロント作業機の操作を検出しないときよりもステアリングバルブ4のストロークを大きくするように制御する。
(もっと読む)
屈曲式の建設車両
【課題】一般車道での走行に好適で、現場での作業にも適したステアリング操作が行える屈曲式の建設車両を提供する。
【解決手段】屈曲可能な自走車体1と自走車体屈曲用の車体屈曲用油圧シリンダ2と車体屈曲用油圧シリンダ2への圧油の流れを制御するパイロット式方向切換弁5とハンドル7Aの回転操作により方向切換弁7の信号受け部にパイロット信号を出力して同切換弁5を切り換えるハンドル用操作装置6とを備えた屈曲式の建設車両において、レバー11Aの傾動操作により電気信号を出力する電気レバー用操作装置10と同操作装置10の電気信号が入力されレバー11Aの操作に係る電気信号を出力するコントローラ11と、この電気信号をパイロット信号に変換して方向切換弁5の信号受け部に出力し同切換弁5を切り換える信号変換手段と、ハンドル7Aの回転操作とレバー11Aの傾動操作による方向切換弁5の操作を選択的に行えるようにした操作方式の選択手段とを設けた。
(もっと読む)
車両のステアリング制御装置
【課題】作業車両の作業性と高速安定性を両立させるべく、既に搭載されている油圧回路に油圧機器等を僅かに追加し容易に組み込み可能とすることで、車速に応じてきめ細かく操舵角変化量を変化させるようにする。
【解決手段】遊星歯車機構40の入力軸40Aには、ステアリング用操作子1の操作回動軸1aが、出力軸40Bには、ステアリング用バルブ30の入力回動軸31に連結される。また遊星歯車機構40の減速用軸40Cには、可変容量型油圧モータ50の駆動軸51が連結される。該油圧モータ50の流入ポート50A、50Bには、圧油供給手段60によって、ステアリング機構90の操舵角αに応じた流量の圧油が供給される。車両100の速度は、車速検出手段4で検出され、制御手段70、5は、車速検出手段4で検出された車両100の速度Vに応じて可変容量型油圧モータ50の容量qを制御する。
(もっと読む)
車輌用操舵装置
【課題】 操舵負荷の大きな車輌に対しても車輪の操舵方向及び操舵量を小さな操作力でもって正確に制御することができ、ハンドルの回動量に対して操舵角の変化量の比率を連続的に変化させることができ、しかもハンドルの回動量が少ないときでも確実に操舵できる車輌用操舵装置を提供する。
【解決手段】 ハンドル6の回動量に応じてサーボ式ロータリーバルブ2が制御され、ステアリングポンプ7からパイロットシリンダ40に供給する流量を計量した可変容量型油圧モータ3の回転は、減速機4、回転伝達機構5を介してサーボ式ロータリーバルブ2にフィードバックされる。切換弁41はリンク機構42を介してパイロットシリンダ40の作動により制御され、ステアリングポンプ39からの圧油を一対の操舵用油圧シリンダ35,37に供給して、車輌の操舵を行う。車輌の操舵は、リンク機構42を介してフィードバックされ切換弁41を中立位置に戻す。車輌の操作状態に基づいて可変容量型油圧モータ3の容量が制御される。
(もっと読む)
1 - 20 / 30
[ Back to top ]