
Fターム[3D301EA50]の内容
Fターム[3D301EA50]に分類される特許
1 - 20 / 116
サスペンション制御装置
【課題】車両振動の各振動成分の各バネ上挙動を抑制する。
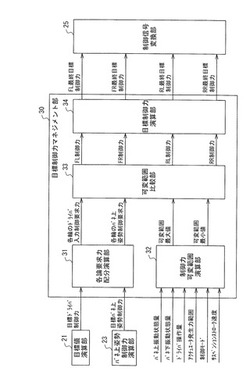
【解決手段】サスペンション制御装置は、減衰させる制御力の出力可能な範囲を算出する制御力可変範囲演算部32と、制御力可変範囲演算部32が算出した出力可能な範囲と車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの少なくとも2つの振動成分から算出された各制御力とをそれぞれ比較し、車両振動のバウンス振動成分、車両振動のピッチ振動成分、及び車両振動のロール振動成分のうちの前記少なくとも2つの振動成分について前記出力可能な範囲内の制御力を抽出する可変範囲比較部33と、可変範囲比較部33が抽出した各制御力に基づいて、各輪の目標制御力を算出する目標制御力演算部34と、目標制御力演算部34が算出した目標制御力に基づいて、ACTR部を制御する制御信号変換部25とを備える。
(もっと読む)
サスペンション制御装置

【課題】サスペンションのストローク速度の推定精度を向上可能とする。
【解決手段】制御装置(20)が、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分(Vb0)に基づいて目標周波数(fc)を設定する。続いて、制御装置20が、サスペンションのストローク速度(Vz)から目標周波数(fc)を含む周波数帯域の成分を除去する。また、制御装置20が、除去後のストローク速度(Vz)(ストローク速度推定値(VzSH))に基づいて、サスペンションのストローク状態を制御する。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】左右サスペンションの何れか一方の荷重−変位特性(バネ特性)が線形近似可能な範囲ではない場合、更新禁止状態であると判定し、更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
車両のロール角推定方法及び装置
【課題】検出ロール角の補正精度の低下を抑制可能な方法及び装置の提供。
【解決手段】車両に発生する加速度が予め設定された所定加速度以上である場合、更新禁止状態であると判定し、所定加速度未満である場合、更新禁止状態ではないと判定する。更新禁止状態ではないと判定した場合、求めた補正ロール角φ2offを更新して記憶し、更新禁止状態であると判定した場合、補正ロール角φ2offの更新を実行しない。
(もっと読む)
サスペンション制御装置
【課題】積分誤差のない速度に基づいて緩衝器の制御を行うことができるようにしたサスペンション制御装置を提供する。
【解決手段】GPSセンサ9は、GPS受信機8からのGPS信号を用いて垂直方向速度情報を演算する。コントローラ10の乗り心地制御部12は、GPSセンサ9からの垂直方向速度情報をばね上速度V1として用いることによって、乗り心地制御に基づく制御指令値を出力する。一方、コントローラ10のうねり抑制制御部14は、他のコントローラ16から出力される車両状態信号に基づいて、ピッチを抑制する制御指令値を出力する。指令値切換部15は、GPS受信機8の受信状態に応じて、乗り心地制御部12による制御指令値とうねり抑制制御部14による制御指令値とのうちいずれか一方を選択して出力する。
(もっと読む)
サスペンション制御装置及びサスペンション制御方法
【課題】ストローク速度が微低速域であっても車両姿勢をより精度良く制御可能とする。
【解決手段】車両の上屋挙動の検出値に基づき第1目標制御量A1を算出すると共に、車両の制駆動力から推定した上屋挙動に基づき第2目標制御量A2を算出する。その算出した第1目標制御量A1及び第2目標制御量算出手段に基づき最終目標制御量Aを算出する際に、上屋挙動が小さい場合、該上屋挙動が大きい場合に比べて第2目標制御量A2を優先して最終目標制御量Aを算出する。そして、その最終目標制御量Aに基づいて、サスペンションのストロークを制御可能なアクチュエータ15を駆動制御する。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsに基づいて、車両平面運動成分および路面外乱成分を除去した車体速の成分である基準車体速成分Vb0を算出する。続いて、算出した基準車体速成分Vb0に基づいて、サスペンションのストロ−ク速度Vzを算出する。そして、算出したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。それゆえ、例えば、車両平面運動成分や路面外乱成分が混入し、車輪速ωsの検出精度が低下しても、基準車体速成分Vb0の推定精度の低下を抑制できる。そのため、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
サスペンション制御装置
【課題】サスペンションのストロ−ク速度の推定精度を向上可能とする。
【解決手段】制御装置20が、車輪速ωsが含んでいる成分のうち、サスペンションのストロ−クに伴う車輪14の車両前後方向への変位に起因する成分である車輪前後変位成分ωzyに基づいて、サスペンションのストロ−ク速度Vzを推定する。そして、推定したストロ−ク速度Vzに基づいてサスペンションのストロ−ク状態を制御する。この構成によれば、例えば、サスペンションがストロ−クすると、車輪14に車両前後方向への変位が発生するところ、サスペンションのストロ−クに伴う車輪前後変位成分ωzyに基づくことで、サスペンションのストロ−ク速度Vzの推定精度を向上できる。
(もっと読む)
走行状態判定装置
【課題】車両に搭載されたカメラの撮影画像を処理してピッチ角からその車両の走行状態や路面状態を判定する走行状態判定装置において、ピッチ角を、簡単にかつ、実際との乖離なく正確に推定できるようにして判定性能を向上する。
【解決手段】車両1に搭載されたカメラ2の撮影画像を、射影変換部32によってカメラ視点を変える簡単な座標変換の処理で迅速に側面視画像に射影変換し、ピッチ角推定部4により即面視画像の時間変化から車両1のピッチ角を実際との乖離を防止して正確に推定推定する。
(もっと読む)
サスペンション制御装置及び車両制御装置
【課題】 車両をより安全に運転制御することができるようにする。
【解決手段】 複数の車輪2,3のうち輪荷重を増加させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をハード側にすると共に後期をソフト側に切替える輪荷重増加時の縮み行程制御と、伸び行程中の初期をソフト側とすると共に後期をハード側に切替える輪荷重増加時の伸び行程制御と、輪荷重を減少させる車輪側に設けられた減衰力可変ダンパ6,9の減衰力特性を、縮み行程中の初期をソフト側とすると共に後期をハード側に切替える輪荷重減少時の縮み行程制御と、伸び行程中の初期をハード側とすると共に後期をソフト側に切替える輪荷重減少時の伸び行程制御との少なくともいずれか一つの制御を選択的に行う。
(もっと読む)
サスペンション制御装置
【課題】 車両の制動時に前輪側での輪荷重の抜けが発生するのを低減でき、制動距離の短縮化を図ることができるようにする。
【解決手段】 車両の制動時には、コントローラ17内に形成したアンチダイブ制御部19により減衰力特性をハードな状態に切換える制御を行う。制御指令演算部20では、ピッチレートセンサ16で検出されるピッチレートP(t)の変化量、即ち前輪荷重検出手段による輪荷重が減少してくると、アンチダイブ制御を行っている間であっても少なくとも伸び側の減衰力特性をソフト側に変更する制御を行う。ピッチレートP(t)の微分値dP/dtから車両のノーズダイブの終了時を判断し、アンチダイブ制御を解除することにより、車両の走行状態に応じたアンチダイブ制御を実行することができる。
(もっと読む)
トレーラの車軸昇降装置
【課題】トレーラの軸数に拘わらず既存の測定台により連結車両の車両総重量の測定作業を容易に行え、且つ走行時の安全を確保することにある。
【解決手段】昇降式の走行車軸を接地位置と退避位置とに駆動するアクチュエータ48と空気圧タンク54とを接続する空気圧回路55に電磁弁56を設けるとともに、昇降式の走行車軸を支持するサスペンションに設けられた空気ばね44と空気タンク54とを接続する空気圧回路57に電磁弁58を設ける。各電磁弁56,58は電気回路63を開閉する操作スイッチ62により切り換えられ、昇降式の走行車軸の駆動が操作される。また、駐車ブレーキセンサ69からの信号により電気回路63を開閉するリレー66を設け、駐車ブレーキセンサ69によりトレーラの車両停止状態が未検出のときには、昇降式の走行車軸の退避位置への駆動を遮断して昇降式の走行車軸を接地位置とする。
(もっと読む)
車両制御装置
【課題】 車両挙動変化に対するショックアブソーバの減衰力特性の制御の遅れを抑制することができる車両制御装置を提供すること。
【解決手段】 ホイルシリンダ液圧が高くなるほど減衰力特性をハードに設定するようにした。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の補助を行うこと。
【解決手段】車輪と車体との間に介在された能動型のサスペンション装置と、車両周囲の障害物を検出する障害物検出手段と、障害物検出手段によって検出した障害物の種類を判別する障害物判別手段と、障害物判別手段の判別結果に基づいて、傾斜角を有する仮想路面を設定する仮想路面設定手段と、仮想路面設定手段によって設定した仮想路面の傾斜角と対応させて、能動型のサスペンション装置を制御し、車体を傾斜させる車体制御手段と、障害物検出手段によって検出した障害物への接近度合いに応じて、操舵反力を制御する操舵反力制御手段とを備える。
(もっと読む)
サスペンション制御装置、及びサスペンション制御方法
【課題】制動力又は駆動力の前後配分が変化しても、車両の減速又は加速に応じた車体姿勢の変化を抑制する。
【解決手段】摩擦ブレーキが作動したときには(ステップS2の判定が“Yes”)、先ず前輪に対する制動力の配分比率αと、後輪に対する制動力の配分比率(1−α)とを算出する(ステップS3)。そして、車両減速に伴う車体のピッチングを抑制するための抑制モーメントMcpを算出し(ステップS4)、この抑制モーメントMcpで車両減速に伴ってバネ上の車体位置が上昇するジャッキアップも併せて抑制可能となるように、抑制モーメントMcpを作用させる中心位置Lcを、配分比率αに応じて設定する(ステップS5)。こうして算出した中心位置Lc周りに抑制モーメントMcpが作用するように、前輪ショックアブソーバ2FL・2FR、及び後輪ショックアブソーバ2RL・2RRを個別に駆動制御する(ステップS6、S7)。
(もっと読む)
車両用サスペンションシステム
【課題】 複数の電磁式のショックアブソーバを備えた車両用サスペンションシステムの実用性を向上させる。
【解決手段】 複数の電磁アブソーバ20に電力を供給する電源装置152を、複数の給電系統148a,148bを有するように構成する。そして、そのシステムを、それら複数の給電系統の各々が、複数の電磁アブソーバのうちの1以上のものに電力を供給し、かつ、複数の電磁アブソーバの各々が、それら複数の給電系統のうちのいずれか1つのみから電力の供給を受けるように構成する。複数の給電系統のいずれか1つが失陥した場合であっても、一部の電磁アブソーバへの電力の供給を維持できることから、その一部の電磁アブソーバの作動が確保される。その結果、実用性の高いシステムが構築される。
(もっと読む)
ばね上縦加速度センサ異常検出装置
【課題】高精度な異常判定機能を有するばね上縦加速度センサ異常検出装置を提供する。
【解決手段】(a)車体の前後方向の位置に対応するX軸と(b)車体の車幅方向の位置に対応するY軸と(c)XY平面に垂直な方向に延びて車体の上下に延びる軸線方向の加速度の大きさに対応するG軸とによって規定される座標空間を定義した場合において、4つのばね上縦加速度センサの各々の車体への配設位置における前後方向の位置xおよび車幅方向の位置yと検出された車体の上下に延びる軸線方向の加速度の値gとに対応して座標空間内に定まる4点A,B,C,Dが一平面上にあるとみなせる場合に、それら4つのばね上縦加速度センサの各々に異常は無いと判定し、それら4点A,B,C,Dが一平面上にないとみなせる場合に、それら4つのばね上縦加速度センサのうちの少なくとも1つのものに異常が発生したと判定する。
(もっと読む)
車両用サスペンションシステム
【課題】複数の車輪に対応して複数の電磁式ショックアブソーバを備えたサスペンションシステムの実用性を向上させる。
【解決手段】複数のショックアブソーバ30に対応して設けられた複数の有接点式の継電器200によって、通常は、複数のショックアブソーバ30のすべてに対してそれが有するモータ44と電源152とを接続した接続状態を実現し、複数のショックアブソーバ30のうちの1つが有するモータ44の発電電流が継電器200の溶着現象の発生を考慮して設定された設定電流を超えると予測される状況下において、そのショックアブソーバ30に対してモータ44と電源152との接続を断った遮断状態を実現するように構成する。発電電流が大きくなる過程におけるある程度早い段階で遮断状態を実現して、継電器200の接点の溶着を防止しつつ、電源152に大きな負荷が掛からないようにできる。
(もっと読む)
車両用運転操作補助装置、車両用運転操作補助方法および自動車
【課題】運転者に対し、より適切に車両の運転操作の支援を行うこと。
【解決手段】本発明に係る自動車では、情報伝達制御手段が、運転者の上下方向の動きを、リスクポテンシャルの大きさに応じて抑制して、外乱情報を運転者に伝達する制御量を算出する。擬似車両挙動発生手段が、リスクポテンシャルが増大する運転操作を行った場合の車両挙動を、動作制御手段を制御することによって擬似的に発生させるための制御量を算出する。協調制御手段が、情報伝達制御手段によって算出された制御量と、擬似車両挙動発生手段によって算出された制御量とに基づいて、車両を制御する。
(もっと読む)
後輪制御装置
【課題】タイヤ内圧が低い場合の走行燃費を向上する。
【解決手段】タイヤ内圧センサ21L,21Rにより検出された左右後輪のタイヤ内圧信号が入力するタイヤ内圧平均算出部23と、タイヤ内圧平均信号が入力するトーイン制御部24と、トーイン信号に基づいて各電動アクチュエータ11L,11Rの駆動信号を出力するアクチュエータ駆動制御部25とを設け、後輪のタイヤ内圧平均値が低い場合には後輪のトーイン量を通常走行状態よりも増大する。後輪を引きずるようにして走行するようになり、タイヤと路面との摩擦が大きくなるため、タイヤが発熱し、それにより早期にタイヤ内圧が上がる。走行開始時から早い段階で、タイヤ内圧が適正値になり、それに応じて通常走行状態のトーイン量に戻して、転がり抵抗の少ない走行を行うことができるようになり、走行燃費を向上し得る。
(もっと読む)
1 - 20 / 116
[ Back to top ]