
Fターム[5C122FA18]の内容
Fターム[5C122FA18]に分類される特許
1 - 20 / 1,314
撮像装置
撮像装置
画像処理装置および画像処理方法、プログラム
撮像装置のシェーディング補正方法、及び撮像装置
撮像装置
電子カメラおよび電子カメラの制御方法
撮像装置、撮像装置の制御方法、プログラム
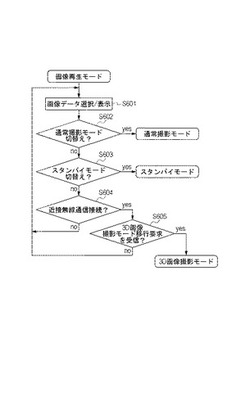
【課題】単体では2次元画像の撮影を行う撮像装置を複数台利用し、3次元画像の撮影を簡単に行えるようにする。
【解決手段】撮像装置は3次元画像を撮像するための撮像パラメータの情報を他の撮像装置と共有する手段を有し、前記他の撮像装置と無線接続している際に、ユーザから撮像指示があった場合には、前記他の撮像装置と共有した前記撮像パラメータを用いて、前記他の撮像装置と共に3次元画像を生成するための撮像を行い、前記他の撮像装置と無線接続していない際に、ユーザから撮像指示があった場合には、2次元画像を生成するための撮像を行う。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム

【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
車載カメラのキャリブレーション装置
【課題】走行中に後方の車載カメラの光軸を自動的に補正する。
【解決手段】車両後方監視用のビデオカメラ11を備え、後方監視動作のプログラムとカメラ取り付けキャリブレーションプログラムの双方を備えた車両にあって、車両が後進以外どうかを検出して、後方監視動作プログラムとカメラ取り付けキャリブレーションプログラムとを切り換えて同一の制御部12を用いて動作をさせる。ギヤが後進位置にあるときは後方監視プログラムを制御部12で実行させ、ギヤが後進位置以外のときは、キャリブレーションプログラムを制御部12で実行する。これにより、ギヤが後進位置以外のときにカメラ11の取り付け外部パラメータを常時最新の状態に更新することが可能となる。
(もっと読む)
画像処理方法および装置、プログラム
【課題】複数の撮像部によって構成される多眼方式の撮像装置において、一部の撮像部に動作不良が生じても、簡易かつ精度よく当該動作不良の生じた撮像部の撮影領域をカバーする。
【解決手段】複数の撮像部によって構成される、回転機構によって回転可能な撮像部群と、前記撮像部の不良を検知する不良撮像部検知手段と、を備える多眼方式の撮像装置であって、前記不良撮像部検知手段で不良が検知された撮像部の位置に不良が検知されなかった撮像部がくるように前記撮像部群を回転させ、不良が検知された撮像部によって取得されるべき画像を不良が検知されなかった撮像部を用いて撮影する。
(もっと読む)
撮影装置およびその制御方法
【課題】撮影操作による手振れを抑制しつつ、連写機能を実現する。
【解決手段】本発明の撮影装置は、撮影を行い、撮影画像の画像データを出力する第1のカメラ部と、前記第1のカメラ部を被写体に向けた状態で撮影者に向けられるように配置され、撮影を行い、撮影画像の画像データを出力する第2のカメラ部と、記憶部と、撮影を行う旨が入力されると、前記第1および第2のカメラ部を起動し、前記第2のカメラ部から出力された画像データに示される画像において所定の条件が満たされるか否かを判定し、前記所定の条件が満たされている間、所定の時間間隔で前記第1のカメラ部から出力される画像データを順次、前記記憶部に記憶させる制御部と、を有する。
(もっと読む)
立体映像撮影システム
【課題】 フォーカスと連動して輻輳角が動作する立体映像撮撮影システムにおいて、フォーカスと輻輳角を、必要に応じて連動と非連動に切換える立体映像撮影システムを提供すること。
【解決手段】 立体映像撮影システムは、一対のレンズ装置と、該一対のレンズ装置による被写体像を撮像するカメラ装置と、該一対のレンズ装置の輻輳角を変更する輻輳角変更手段と、該一対のレンズ装置のフォーカス群の動作に連動して、該一対のレンズ装置の輻輳角を制御する制御手段と、該輻輳角をフォーカス群の動作に連動させる連動状態と連動させない非連動状態とで切換える連動切換手段と、を有する。
(もっと読む)
画像処理装置および画像処理方法、並びにプログラム
【課題】多視点からの画像データを用いて、リフォーカス処理と高解像度化処理とを同時に行う場合、どの視点から見ても被写体上の同一の点は同じ輝度(色)に見えている必要がある。また、被写体が仮想的なピントを合わせる面上に存在する必要がある。そのため、上記条件から逸脱している場合、画質劣化が生じる。
【解決手段】仮想撮像系が合焦する面の情報と複数の視点の配置の情報とから、前記複数の画像データの画素が前記仮想撮像系の画像上のどの位置に配置されるかを表す画素配置パラメータを算出し、画素配置パラメータから前記複数の画像データ間の前記仮想撮像系の画像上での画素値の整合度を算出する。そして、整合度から前記仮想撮像系の画像上での画素位置の近傍にある画素の画素補間パラメータを算出し、前記配置パラメータと前記画素補間パラメータとを用いて、前記複数の画像から画像合成を行う。
(もっと読む)
棒状ワーク撮像装置および棒状ワークの先端同心判定装置
【課題】測定時間を短縮できると共に、高い精度で棒状ワークを管理できる棒状ワーク撮像装置および棒状ワークの先端同心判定装置を提供する。
【解決手段】鏡筒13にビームスプリッター42、43を設け、対物レンズ41からの像光を3つの光路P1〜P3に分光し、各光路P1〜P3の像光を拡大して、カメラ14、15、16で撮像する。ビームスプリッター42、43の光軸の中心位置をずらすことで、鏡筒13に連なるカメラ14で先端加工部21を撮像し、カメラ15で本体ストレート部23の一方の輪郭を撮像し、カメラ16で本体ストレート部23の他方の輪郭を撮像する。これらカメラ14、15、16の撮像信号を解析し、先端加工部21の軸心の位置と本体ストレート部23の軸心の位置とが合致するかどうかにより、棒状ワーク10の良否を判定する。
(もっと読む)
複眼撮像装置、複眼撮像装置の焦点合わせ方法、および電子情報機器
【課題】画角の異なる左右一対の視差画像のそれぞれを撮像するための光学系の焦点を適切な位置に簡単に合わせることができ、これにより自動ピント合わせに要する制御時間を短時間に抑えつつ、立体画像を形成する左右一対の視差画像を精度よく取得することができる複眼撮像装置を実現する。
【解決手段】被写体を左右一対の視差画像が得られるよう撮像する第1および第2の撮像部12および22と、各撮像部12、22に対応する第1、第2の光学系11、21と、各光学系の焦点をそれぞれの視差画像における焦点評価領域内の画像に基づいて決定する信号処理部31とを備え、両撮像部12および22の視差に基づいて、左目用画像に対する第2の焦点評価領域の相対位置が右目用画像に対する第1の焦点評価領域の相対位置に一致するよう、左目用画像に対する第2の焦点評価領域の相対位置を調整する。
(もっと読む)
撮像装置
【課題】広変倍域すべてにわたって高解像度で高画質の画像を得る。
【解決手段】同一方向を向いた単焦点の第1,第2撮像光学系LN1,LN2を有し、第2撮像光学系LN2の焦点距離が第1撮像光学系LN1の焦点距離よりも長く、第1撮像光学系LN1で得られた画像の切り出しによる電子ズームで広角端から中間焦点距離状態までのズーミングを行い、前記第2撮像光学系で得られた画像の切り出しによる電子ズームで中間焦点距離状態から望遠端までのズーミングを行うことにより、全体として広角端から望遠端までのズーミングを行う。第1,第2撮像光学系LN1,LN2のいずれもが、物体側から順に、正パワーの第1レンズと、負パワーの第2レンズと、を有する4枚以上のレンズから成るとともに、最も像側のレンズが負レンズであり、第1レンズと第2レンズの合成焦点距離が正であり、条件式:1.0<fFw/fFm<1.5を満足する。
(もっと読む)
表示装置、撮像装置、および映像表示システム
【課題】複数の撮像装置が異なる被写体を撮像している場合に、各被写体が存在する位置を視覚的に認識しやすくすることができる表示装置、撮像装置、および映像表示システムを提供する。
【解決手段】被写体の映像信号、撮像位置を表す撮像位置情報、および撮像方向を表す撮像方向情報を対応付けて記憶する記憶部と、被写体の映像を表示する表示部と、表示部が映像を表示するときの表示方向を表す表示方向情報を取得する表示姿勢情報取得部と、撮像位置情報に基づいて複数の撮像位置の立体空間における相対的な位置関係を演算するとともに、撮像方向情報と表示方向情報とに基づいて複数の撮像方向それぞれの表示部の表示方向に対する相対的な方向関係を演算する演算部と、複数の映像信号の映像を表示部に表示するとき、相対的な方向関係に応じて回転させた回転映像を、表示部の表示領域内で相対的な位置関係を維持した位置に表示させる制御部と、を備える。
(もっと読む)
PCBの素子を配列するカメラシステム
【課題】外付けの光学システムを使用することによる欠点がない、鮮明度が高い画像を生成するカメラシステムを提供する。
【解決手段】第1面と、第1面と反対の第2面とを有する筐体102と、筐体の第1面に位置し筐体から離れる第1方向に向けられ、素子112の画像を捕捉し第1画像信号を生成する第1画像センサ104であって、プリズムを有さない第1レンズアセンブリを含む第1画像センサと、筐体の第2面に位置し、第1方向と反対の第2方向に向いて第1画像センサと配列され、PCB上のフットプリントの画像を捕捉し、第2画像信号を生成する第2画像センサであって、プリズムを有さない第2レンズアセンブリを含む第2画像センサ106と、第1画像信号と第2画像信号とをミックスし、ミックス画像信号を生成するミックス回路と、ミックス画像を処理し、表示モニタに素子とフットプリントとの重ね合わせ画像を表示するプロセッサとを有する。
(もっと読む)
複眼カメラの制御方法及び制御装置
【課題】 複数の固体撮像素子間の画質の差異を小さくすることを可能にした固体撮像素子の駆動制御方法を提供すること。
【解決手段】 第1の撮像素子と第2の撮像素子と、前記第1、第2の撮像素子の駆動回路と、前記第1、第2の撮像素子からの映像信号のノイズ量を比較するための画像処理回路と、を具え、前記第1の撮像素子を駆動している期間において、前記ノイズ量の比較結果に応じて、第2の撮像素子を駆動することを特徴とする構成とした。
(もっと読む)
LEDドライバ、撮像装置、電子機器及びLEDの発光方法
【課題】暗い環境下での3D画像撮影において、3D画像効果を高めることができるLEDドライバを提供する。
【解決手段】左側カメラを含む左側撮像部と右側カメラを含む右側撮像部の各々に対して撮像補助光源となる左側LED及び右側LEDを発光させるLEDドライバであって、前記左側撮像部及び前記右側撮像部から出力される撮影開始タイミング信号をそれぞれ入力される入力端と、前記左側LED及び前記右側LEDにそれぞれ電流を出力する出力端と、を備え、前記左側撮像部及び前記右側撮像部それぞれからの前記撮影開始タイミング信号に同期して、前記左側LED及び前記右側LEDそれぞれに異なる大きさの電流を供給するLEDドライバとする。
(もっと読む)
1 - 20 / 1,314
[ Back to top ]