
国際特許分類[B63H25/04]の内容
処理操作;運輸 (1,245,546) | 船舶またはその他の水上浮揚構造物;関連艤装品 (9,089) | 船舶の推進または操舵 (3,538) | 操舵;推進器の使用による以外の減速 (636) | 操舵のための入力装置 (110) | 自動的なもの,例.コンパスに対して応答するもの (82)
国際特許分類[B63H25/04]に分類される特許
1 - 10 / 82
運航支援装置及び船
【課題】十分な燃料消費量の低減をすることができる運航支援装置及び船を提供する。
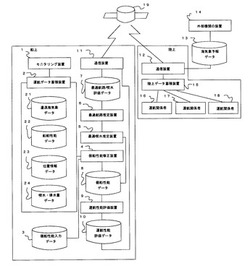
【解決手段】船舶航行時の周囲の海気象データを取得する通信装置11と、平水の影響下での船の平水中性能、波浪の影響下での船の波浪中性能、及び風の影響下での船の風中性能のそれぞれの個船性能を記憶する個船性能データベース8と、通信装置11で取得した海気象データ、個船性能データベース8に記憶した、平水中性能、波浪中性能、及び風中性能に基づいて、航海での燃料消費量である燃費が最小となる状態を推定する最適状態推定手段とを備えるものである。
(もっと読む)
自動操舵装置

【課題】従来解消できなかった針路偏差を解消する。
【解決手段】針路偏差を解消し得る指令舵角を算出して船舶Sの舵13を自動制御する自動操舵装置Aであって、船舶Sの変針時に、船舶Sの舵13のPID制御における比例舵及び微分舵を舵角の制限値である舵角リミット値を用いて制限し、積分舵を舵角リミット値を用いて制限しない演算制御部4を具備する。
(もっと読む)
船舶用自動操舵装置
【課題】保針中、変針中のいずれにも左右されることなく潮流成分を推定することができる船舶用自動操舵装置を提供する。
【解決手段】推定器18が、方位誤差の推定を行う方位制御系推定器18Aと、航路誤差の推定を行う航路制御系推定器18Bと、対地座標系での潮流の推定を行う対地座標系潮流推定器18Cと、を備えており、対地座標系潮流推定器18Cは、センサから得られた船体の方位(ψ)及び対地座標系における船体の位置(x,y)から、参照方位を用いずに推定潮流ベクトル(dx^,dy^)の推定を行う。
(もっと読む)
船舶用自動操舵装置
【課題】操舵機の飽和状態を回避しつつ、旋回時に潮流成分を考慮することにより計画航路に追跡させることができる船舶用自動操舵装置を提供する。
【解決手段】計画航路に従う旋回を行うための参照方位ψRを発生する参照方位発生部30と、推定潮流成分を、参照方位発生部30で出力する参照方位に基づき座標変換を行う座標変換部40と、座標変換部40で座標変換された潮流速度成分から潮流に対抗する斜航角βdを求める潮流修正部42と、参照方位ψRにするための参照舵角δRと斜航角βdを発生させるための潮流舵角δDとを求めて、これらの舵角からフィードフォワード舵角δFFを発生するフィードフォワード舵角発生部46と、推定潮流成分を用いて参照舵角設定値δ0Rを求める舵角設定部28と、を備える。参照方位発生部30は、参照舵角δRが舵角設定部28で求められた参照舵角設定値δ0Rを超えないように参照方位ψRを発生する。
(もっと読む)
船舶運航支援装置
【課題】適正燃費を達成し、操縦者の操縦上の負担を大幅に軽減することができる船舶運航支援装置を提供する。
【解決手段】入力手段22によって入力される船舶の航行情報と、及び記憶手段25から得られる前記航行情報に関連する海象情報と、位置情報認識手段30によって取得される航行中の船舶10の位置情報とから、前記航行情報に基づく船舶10の航行中の少なくとも推奨回転数情報を有する燃費情報を作成する制御手段23と、前記推奨回転数情報と実回転数情報とを操縦者に認識可能に表示する表示手段24とを有する船舶運航支援装置である。
(もっと読む)
船舶用自動操舵装置
【課題】船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有する船舶用自動操舵装置において、最適な変針軌道計画を実現し、安定的、効率的な操船を可能とする。
【解決手段】軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、加速モードにおいて、変針開始時点の旋回角加速度初期値C1aと旋回角速度C2aとの初期値がゼロでない場合にその値を取り込んで参照針路を演算する。初期値をゼロとした場合の変針量ΔψRと最大舵速度δ'Rとの関係に基づき、変針量ΔψRに応じて最大舵速度δ'Rを求める。そして、その舵速度δ'Rを用いて初期値がある場合の各モードの参照針路の演算を行なう。
(もっと読む)
船舶用自動操舵装置
【課題】パラメータの不確かさの存在下で閉ループの安定性を図ることができる船舶用自動操舵装置を提供する。
【解決手段】制御対象18からの検出方位から外乱を除去した推定値を出力する推定器24と、推定器からの推定値と設定方位から得られる値に対してフィードバックゲインを乗じて命令舵角を出力する状態フィードバック制御器22とを有するフィードバック制御器12を備え、命令舵角に応じて舵角を経て船体に作用させる操舵機及び船体を含む制御対象18と共に閉ループを構成する。フィードバックループの特性多項式と、船体モデルと波浪モデルと舵角オフセットモデルとを推定する多項式からなる推定器24の特性多項式からなる閉ループの特性多項式により、推定器の船体モデルの固有角周波数ωeを設定する。
(もっと読む)
船舶用自動操舵装置
【課題】船舶の所望される変針量に対して参照針路を演算して出力する軌道演算部と、該参照針路からフィードフォワード舵角を演算して開ループ制御を行うフィードフォワード制御器と、を有する船舶用自動操舵装置において、最適な変針軌道計画を実現し、安定的、効率的な操船を可能とする。
【解決手段】軌道演算部は、参照針路を加速モード、等速モード及び減速モードに分けて出力し、前記フィードフォワード制御器は、
【数1】
ここで、KS、TS、TS3は船体パラメータで、それぞれ旋回力ゲインと
2つの時定数、sはラプラス演算子である。の伝達特性を持つ。
(もっと読む)
操船制御装置、自動操船制御システム、操船制御方法、及びプログラム
【課題】他船や航走体へ追従する操船や、自動操船以外の他の制御装置との間で連携を図った制御が実現できる操船制御装置、自動操船制御システム、操船制御方法、及びプログラムを得る。
【解決手段】航走体3の位置に関する情報が入力される入力部11と、航走体3の位置に関する情報に基づき、自船1が航走体3に追従するように、自動操船装置20への指令値及び航走体操縦装置40への指令値を求める指令値演算部12とを備えたものである。
(もっと読む)
操船制御装置、自動操船制御システム、操船制御方法、及びプログラム
【課題】他船や航走体へ追従する操船や、自動操船以外の他の制御装置との間で連携を図った制御が実現できる操船制御装置、自動操船制御システム、操船制御方法、及びプログラムを得る。
【解決手段】被曳航体4の位置又は曳索張力に関する情報が入力される入力部11と、被曳航体4の位置又は曳索張力に関する情報に基づき、自動操船装置20への指令値及び曳航装置50への指令値の少なくとも一方を求める指令値演算部12とを備えたものである。
(もっと読む)
1 - 10 / 82
[ Back to top ]