
株式会社小松製作所により出願された特許
71 - 80 / 1,686
作業車両の周辺監視装置
【課題】俯瞰画像において作業車両の近くに位置する物体を容易に認識することができる作業車両の周辺監視装置を提供する。
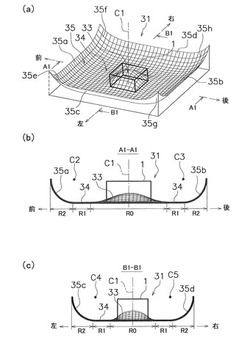
【解決手段】作業車両の周辺監視装置において、第1撮像部は、作業車両の周囲の第1領域を撮像して第1画像データを得る。俯瞰画像作成部は、第1画像データを所定の仮想投影面31に投影することにより、作業車両の周囲の俯瞰画像を作成する。仮想投影面31は、作業車両に近づくほど地面からの高さが高くなる形状を含む。
(もっと読む)
作業車両の周辺監視装置

【課題】本発明の課題は、作業車両の走行時に作業車両の位置をオペレータが容易に認識することができる作業車両の周辺監視装置を提供することにある。
【解決手段】周辺監視装置の俯瞰画像作成部は、作業車両1が停止状態であるときには、第1仮想投影面31を用いて俯瞰画像を作成する。第1仮想投影面31の少なくとも外縁部は、作業車両1から遠ざかるほど地面からの高さが高くなる形状である。作業車両1が走行状態であるときには、俯瞰画像作成部は、第2仮想投影面32を用いて俯瞰画像を作成する。第2仮想投影面32の少なくとも外縁部は、地面からの高さが一定の平坦な形状である。
(もっと読む)
ダンプトラックの積載量表示装置
【課題】周辺監視用のモニタ画面を用いて、運転者に直感的に積荷状態を認識させることが可能なダンプトラックの積載量表示装置を提供する。
【解決手段】周辺監視装置10は、ダンプトラック1の画像を含む俯瞰画像200を表示するモニタ50と、ダンプトラック1の積載量を検知するペイロードメータECU21と、ペイロードメータECU21における検知結果に基づいてダンプトラック1のベッセル4上に画像表示される積荷画像C1の大きさを切り換えてモニタ50に表示させるコントローラ20と、を備えている。
(もっと読む)
ダンプトラック
【課題】ダンプトラックの形状等の制約を考慮しつつ、複数のカメラ配置を適正化することで、死角のない周辺監視を行うことが可能なダンプトラックを提供する。
【解決手段】ダンプトラック1は、運転席が配置されるアッパデッキ部2Bおよび前後方向に沿って配置された車体フレーム2と、車体前方を撮影可能になるようにアッパデッキ部2Bの前方に設置された前方カメラ11と、車体後方を撮影可能になるように車体フレーム2の後端に設置された後方カメラ16と、車体前方から斜め後方まで撮影可能になるようにアッパデッキ部における左右の側方にそれぞれ設けられた左右側方第1・第2カメラ12,13,14,15と、を備えている。
(もっと読む)
キャブ及びモータグレーダ
【課題】操作レバーが誤って操作されることを抑制可能なキャブを提供する。
【解決手段】モータグレーダ1において、左リフトシリンダ操作レバー200は、ロッド210と、下リンク部材220と、上リンク部材230と、持ち手240と、を有する。ロッド210は、ロッド下端部210Aと、ロッド上端部210Bと、屈曲部210Cと、を含む。屈曲部210Cが有する屈曲点Fは、ロッド下端部210Aに設けられる第1軸p1よりも前方に位置している。
(もっと読む)
爆弾処理機
【課題】土中の爆弾を確実に除去することができる爆弾処理機を提供する。
【解決手段】爆弾処理機3は、車両の後部に取り付けられる爆弾処理機3であって、掘削部31と篩部32とを備える。掘削部31は、地面を掘削して土を掬い上げる。篩部32は、掘削部31の後方に配置される。篩部32は、掘削部31によって掬い上げられた土をふるい落とす。篩部32は、ふるい分けられた爆弾を後方へ排出する。第1篩カバー部33と第2篩カバー部34とをさらに備える。第1篩カバー部33は、篩部32の一側方を覆う。第2篩カバー部34は、篩部32の他側方を覆う。
(もっと読む)
ホイルローダ
【課題】オペレータの要求に応じて作業機のリフト力を向上できる作業車両のエンジン制御装置を提供すること。
【解決手段】ホイルローダは、共通のエンジンで駆動される可変容量型の油圧ポンプおよび走行装置と、油圧ポンプからの圧油で駆動される作業機と、エンジンの出力制御および油圧ポンプの容量制御を行うコントローラ7とを備え、コントローラ7は、作業機が掘削作業中か否かを検出する掘削状態検出手段91と、作業機のリフト操作量を検出する操作量検出手段と、掘削作業中であることが検出されたときに、油圧ポンプのポンプ容量を低減させるポンプ容量制御手段92と、掘削作業中であることが検出されたときに、リフト操作量に応じてエンジンの出力を低減させるエンジン出力低減手段93とを備える。
(もっと読む)
作業機械のエンジン制御装置およびそのエンジン制御方法
【課題】発電機の発電オン/オフによる発電機出力が不連続に変動してもエンジン回転数の変動を抑えること。
【解決手段】発電機が用いられる作業機械の運転状態を検出する検出手段と、前記運転状態をもとに、発電機の発電がオフの場合に設定されるエンジン目標回転数とオンの場合に設定されるエンジン目標回転数とを同一の目標マッチング回転数npa’とするエンジン目標回転数設定手段と、発電機の発電がオフの場合に最大限出力することができる発電オフ時のエンジン目標出力ELaを演算し、発電機の発電がオンとなる場合に、前記エンジン目標出力に発電機による発電量相当の発電出力Pmを加えたエンジン目標出力ELbを演算するエンジン目標出力演算手段と、を備える。
(もっと読む)
プレス機械
【課題】ダイクッション側のサーボモータを小型化でき、かつオーバーシュートに関する問題を解決できるプレス機械を提供すること。
【解決手段】スライド2と、スライド2駆動用のサーボモータ17と、ダイクッション7と、ダイクッション7駆動用のサーボモータ49と、サーボモータ17,49を制御入力u1,u2で制御する制御装置18とを備え、制御装置18には、サーボモータ17への荷重指令U1を制御入力u1に基づき生成する第1荷重指令演算部51と、サーボモータ49への荷重指令U2を制御入力u2に基づき生成する第2荷重指令演算部52とが設けられ、制御入力u1,u2は、上型がワークに衝突してから所定時間経過するまでの第1段階でのスライド2およびダイクッション7の終端状態、および所定時間経過してからスライド2が下死点に到達するまでの第2段階でのスライド2およびダイクッション7の終端状態に基づいて演算される。
(もっと読む)
電動モータの制御装置およびその制御方法
【課題】加速性も含めた作業操作上の違和感を低減すること。
【解決手段】作業モードを設定するモード切替部と、設定される作業モードによって予め設定される電動モータの最大出力を取得する作業モード・旋回最大出力変換テーブルTB11と、電動モータの回転速度を検出する回転センサと、前記回転速度と前記最大出力とをもとにトルク制限値Tlimを演算するトルク制限値演算部105と、前記電動モータの加速時に、トルク制限値Tlimによって前記電動モータのトルクを制限するトルク制限手段と、を備える。
(もっと読む)
71 - 80 / 1,686
[ Back to top ]