
JUKI株式会社により出願された特許
91 - 100 / 1,557
部品実装装置
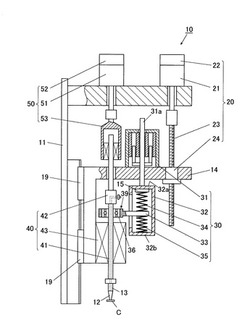
【課題】上下動モータの加減速による慣性力により回転ケースがストッパから離れて上下にばたつくのを抑えること。
【解決手段】昇降自在に支持された移動体14と、移動体を昇降させる第1の駆動源21と、先端部で部品を吸着する吸着ノズル12と、吸着ノズルを昇降させて、吸着ノズルで吸着した部品を実装対象物に加圧して実装する際の駆動源となる第2の駆動源31と、第2の駆動源の駆動を吸着ノズルに伝達する伝達機構39と、移動体に設けられ、吸着ノズルの下降の際に所定の高さで伝達機構が当接して吸着ノズルの下降を制止するストッパ43と、を備え、吸着した部品を実装する部品実装装置100において、第1の駆動源による移動体の下降時における加速中のみ又は上昇時における減速中のみ第2の駆動源の出力を上昇させて、ストッパへの加圧力を増加させる制御手段110を備える。
(もっと読む)
電子部品実装装置及び電子部品実装方法

【課題】部品供給装置の改造を必要とすることなく、駆動方式の異なるテープフィーダを併用することができる電子部品実装装置及び電子部品実装方法を提供する。
【解決手段】部品装着装置1は、一括交換台車を用いて装着されたテープフィーダがメカテープフィーダ32であるか電動テープフィーダであるかを判別する。そして、メカテープフィーダ32であると判断した場合には、駆動動力部10(ノックピン11及びノックシリンダ12)をメカテープフィーダ32のテープ繰り出し動作実施位置まで上昇し、電動テープフィーダであると判断した場合には、駆動動力部10を上昇せず、電動テープフィーダのテープ排出経路を確保する。
(もっと読む)
ミシン
【課題】押さえ上げのソレノイドを適切に配置する。
【解決手段】縫製時に被縫製物を押さえる布押さえ12と、布押さえを保持し、ミシンフレームに対して上下動可能に支持された押さえ棒13と、押さえ棒を介して布押さえを下方への押圧力を付与する押さえバネ14と、ソレノイドを駆動源として布押さえをその待避位置まで上昇させる押さえ上げ装置30とを備えるミシン10において、ソレノイドをミシンフレーム20のミシンアーム部23内に配置した。
(もっと読む)
ミシン
【課題】糸切り動作を適正且つ安定して実行させる。
【解決手段】ミシンモータ1により糸切断を行う糸切り装置30と、糸切り装置とミシンモータを制御する制御手段100と、主軸角度を検出する位置検出器14,15とを備え、糸切り装置は、糸切りカム51と、糸切りカムのカム溝51aに係合するカム従節体52と、カム従節体に連動する動メス31と、カム従節体を係合状態に切り替える糸切りソレノイド56と、釜押さえ13とを備え、制御手段が、速度設定手段で定められた回転速度に応じて、糸切りソレノイドによるカム従節体の連結状態への切り替え動作が一定の主軸角度Aで完了するように駆動開始タイミングを制御する。
(もっと読む)
ミシン
【課題】縫製中でも自在に糸張力を補正する。
【解決手段】縫い針を上下動させる針上下動機構と、縫い針に対して被縫製物を相対的に位置決めする位置決め機構と、糸張力を縫い糸に付与する糸調子装置と、縫製データに基づいて位置決め、糸張力付与及び縫製速度の制御を行う動作制御手段1000とを備え、縫製データ71aに基づく縫製の実行中に当該データに定められた糸張力に対して縫製パターンの全針に及ぶ補正データの入力を受け付ける糸張力補正手段74を備え、動作制御手段は、糸切りを伴うことなく、入力直後の縫い目から補正データに応じた糸張力で縫製を行うことを特徴とする。
(もっと読む)
ミシン
【課題】糸切り動作を適正且つ安定して実行させる。
【解決手段】ミシンモータ1により糸切断を行う糸切り装置30と、糸切り装置とミシンモータを制御する制御手段100と、主軸角度を検出する位置検出器14,15とを備え、糸切り装置は、糸切りカム51と、糸切りカムのカム溝51aに係合するカム従節体52と、カム従節体に連動する動メス31と、カム従節体を係合状態に切り替える糸切りソレノイド56とを備え、制御手段が、針下停止位置でのミシンモータの停止、糸切りソレノイドにより連結状態への切り替え、ミシンモータの駆動の再開からなる糸切り制御を行うミシンにおいて、制御手段は、ミシンモータ停止時の検出主軸角度θ1又はミシンモータの再開駆動速度v1のいずれかによりディレイ時間を決定し、カム従節体の連結動作の適正化を図っている。
(もっと読む)
電子部品供給装置の位置決め構造
【課題】電子部品供給装置の着脱操作性と部品の耐久性及び信頼性の向上を図ることができる電子部品供給装置の位置決め構造を提供すること。
【解決手段】電子部品実装装置に対して着脱可能に装着されて該電子部品実装装置に電子部品を供給する電子部品供給装置の位置決め構造であって、該電子部品供給装置の装着方向前端面に突設された位置決めピン(位置決め突起)を前記電子部品実装装置側に形成された嵌合孔(嵌合凹部)に挿入嵌合させることによって該電子部品供給装置を位置決めする位置決め構造において、前記位置決めピン10の挿入方向中間部にストレート部10aを形成し、該ストレート部10aの挿入方向前後にR形状部10b,10cを形成する。
(もっと読む)
部品実装装置
【課題】ヘッドをX軸フレームの先端から突出させることなく、基板の全範囲をカバーしながらも、電子部品の実装のタクトを低下させないこと。
【解決手段】基板Pを搬送する基板搬送手段3と、電子部品を供給する部品供給手段4と、複数の第1フレーム71と、互いが移動時に接触しないように隙間をあけて配置された一対の第2フレーム72と、互いが移動時に接触しないように隙間をあけて配置され、一対の第2フレームの移動領域に対して一対の第2フレームの移動方向に隣接する移動領域を有する一対の第3フレーム73と、各第2フレーム及び各第3フレームの延在方向に沿って移動自在に設けられた複数のヘッド6と、を備える部品実装装置1において、一対の第2フレーム間の隙間と一対の第3フレーム間の隙間が、第2フレーム又は第3フレームの移動方向に沿った直線上に並ばないように第2フレーム及び第3フレームを配置した。
(もっと読む)
画像探索方法
【課題】高速且つ精度良く対象物を探索する。
【解決手段】二つの特徴点からなる基底ペアの始点となる特徴点を中心して輪郭線の境界追跡を行い、輪郭線に沿った各位置でのエッジ勾配ベクトルの方向の差が規定範囲以下となる安定区間を探す工程と、安定区間と基底ペアの始点との相対位置関係と、安定区間のエッジ勾配ベクトルと基底ベクトルの相対角度と、基底ペアの始点と終点の相対位置関係とを含む基底ペア情報を求める工程と、被探索画像の各特徴点を基底ペアの始点と仮定し、基底ペア情報に基づいて、基底ペア終点の被探索画像上での座標位置を予測する工程と、予測される基底ペアの終点の座標位置に基づいて基底ペアの終点に該当する特徴点を探索する工程と、基底ペアの終点の探索結果に基づいて、基底ペアの始点と見なして被探索画像の各特徴点と基準座標点群との照合を行う特徴点の絞り込みを行う。
(もっと読む)
電子部品実装装置
【課題】電子部品を高密度で配置しつつも実装効率を向上させる。
【解決手段】設置部に複数の部品供給装置10〜30を幅方向に沿って並べるための位置決め部がノズルピッチで形成され、第一の部品供給装置10は一つの筐体に対して一つの供給機構が設けられ、第二の部品供給装置20,30は一つの筐体に対して複数の供給機構が設けられており、さらに、筐体の幅を供給機構の個体数から1減じた値にノズルピッチを乗じた値以下とし、第一の部品供給装置10は嵌合部11に対して所定の距離Aで吸着部13が配置され、第二の部品供給装置20,30は、嵌合部21,31に対して同じ距離Aでいずれかの吸着部23,33が配置されると共に、各吸着部23,33の間隔はノズルピッチWを自然数で除した値とすることを特徴とする。
(もっと読む)
91 - 100 / 1,557
[ Back to top ]