
株式会社不二越により出願された特許
201 - 210 / 625
超硬合金製ツイストドリル
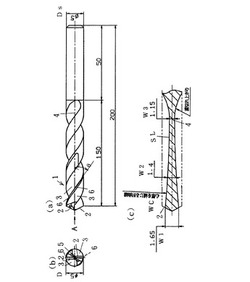
【課題】高いドリル本体剛性と良好な切り屑排出性をバランスさせることでドリル先端部の溝部心厚W1付近での切り屑詰まりによる折損を防止し、安定した深穴明け加工を可能とした超硬合金製ツイストドリルを提供。
【解決手段】ドリル先端部の溝部心厚W1はドリル直径Dの25%〜40%とし、溝切れ上がり部 4の溝部心厚W3をドリル直径Dの23%以上とし、ドリル先端部から溝切れ上がり部 4までの 1/3の位置まで溝部心厚Wを凹曲線状WCに急激に減少させ、
ドリル先端部から溝切れ上がり部 4までの 1/3の位置の溝部心厚W2を、
W2≒W1−〔(W1−溝切れ上がり部の溝部心厚W3)×1/2 〕
とし、かつ前記 1/3の位置での溝部心厚W2から溝切れ上がり部 4の溝部心厚W3まで心厚テーパの勾配が減少したほぼ直線状SLにしたものである。
(もっと読む)
低摩擦摺動部材および低摩擦転動部材

【課題】大気中、真空中、水中および潤滑剤中で低摩擦係数を有し、耐久性、耐荷重性に優れる摺動部材および転動部材を提供する。
【解決手段】基材最上層にダイヤモンドまたはダイヤモンド膜が形成された第一の摺動面を有する第一の摺動部材と、Cが0.15〜0.55重量%、Niが3.5〜10.0重量%、Crが8.0〜25.0重量%を含有して残部がFeと不可避な不純物からなり、焼入れ処理および焼戻し処理により表面硬さがロックウェル硬さで45〜55HRCとなる鉄基合金または鉄基合金層からなる第二の摺動面を有する第二の摺動部材と、を有し、第一の摺動面と第二の摺動面とで摺動可能にされていることを特徴とする低摩擦摺動部材とする。
(もっと読む)
遊星歯車式減速機付油圧モータ
【課題】本体の内周面に形成する内歯車の寿命を安価で寿命の長いように改良した遊星歯車式減速機付油圧モータにする。
【解決手段】遊星歯車式減速機付油圧モータ10は、油圧モータ11と、油圧モータ11と回転自在に結合した遊星歯車機構12を有する減速機13とを、備える。遊星歯車機構12は太陽歯車25,33、内歯歯車29、遊星歯車35等より構成される。本体28の内周面にはスプライン37が形成され、該スプライン37に太陽歯車25、遊星歯車35に噛合う内歯歯車29がスプライン結合するようになっている。
(もっと読む)
座ぐり加工用ドリル
【課題】チップポケットを大きくでき切屑の処理性に優れ、切屑分断性に優れ、刃部の欠け、チッピングをしにくい刃先形状を有し、高能率・長寿命に座ぐり加工が可能な座ぐり加工用ドリルを提供。
【解決手段】対をなし先端角αを 170°〜 190°としてチゼル 6からシンニング 2によって外方に延びる2個の2次切れ刃14、14、各2次切れ刃14、14から外方に延びる中凹状の1次切れ刃11、11及び各1次切れ刃11、11からリーディングエッジ12、12まで延びかつドリル回転方向Cでみて後退する外方切れ刃13、13を有し、ドリル心厚Wをドリル直径Dの0.20〜0.40倍とし、中凹状の1次切れ刃11、11の中凹量をドリル直径Dの0.01〜0.06倍とし、後退する外方切れ刃12、12の後退角度θを−1°〜−20°とした。
(もっと読む)
産業用ロボット
【課題】多関節型の産業用ロボットであって、各関節の姿勢が時々刻々変化したり、負荷の質量が都度変化したりする形態のものにおいても、バランス力を良好に発生させることが可能なバランス機構を有する産業用ロボットを提供する。
【解決手段】一端が基台部1に回転可能に軸支されたアーム3と、一端が基台部1に連結されるとともに、他端がアーム3に連結されたバランス機構4と、を有し、このバランス機構4は減速機構41とサーボモータ42とからなる駆動機構を有するようにした。これにより、アーム3に作用する重力モーメントとバランスする力を、都度、バランス機構4のサーボモータ42に付与することにより、常に適正なバランス力を付与することができる。
(もっと読む)
エンドミル
【課題】底刃のニックを設けない長刃のすくい面のチップポケットを大きし、延性材料でも切りくず排出性を向上して切りくずつまり発生を防止し、長刃から反時計方向に 120°移動した位置に設けたニックを設けた短刃の破損又は溝加工へ移行したときエンドミルの折損がない、穴加工から溝加工を行うことが可能なエンドミルを提供。
【解決手段】外周 2から中心部 3までを加工する長刃 4と長刃 4から反時計方向に 240°移動した位置にエンドミルの半径の 1/3以上の範囲の外周部のみを加工する短刃 5の2枚の底刃を有し、長刃 4から反時計方向に 120°移動した位置には底刃が切断されて短刃をなくした外周刃7のみ設け、長刃 4のすくい面のチップポケットを大きくした、底刃が2枚刃で側面刃が3枚刃のエンドミル。
(もっと読む)
排気ガス処理装置
【課題】排気ガスと接触させる液体の分散や散乱が抑制されて、タールなどの粘着性物質を効率良く分離・回収できる排気ガス処理装置を提供する。
【解決手段】排気ガス処理装置20の外部から内部の拡張室2へ排気ガスを取り入れる排気ガス取入口1と、排気ガス取入口1の下方に設置されている傾斜板3と、傾斜板3表面上に油を溢流できる第1溢流口4と、油を貯留できる油受け5と、油受け5内の油を外部へ排出する油吸入口6を設ける。また、油受け5の上方に位置して、フィルター7が設置された上部拡張室8を設ける。
(もっと読む)
産業用ロボット
【課題】把持対象ワークの異種形状や寸法違いや高さがばらつく場合を含む多数のワークをすくいあげるように把持することができ、かつフィンガーの先端が水平方向に同じ軸方向高さの位置でワークを掴むことができるハンド装置を有する産業用ロボットを提供すること。
【解決手段】少なくとも2個のフィンガーを有しかつ少なくとも2個のフィンガーが開閉する際、すくいあげるように求心動作を行い、かつエンコーダーの検出角度θに対応して、ロボットを作動させてアーム21先端に支持されたハンド装置30を補正量だけ垂直方向Y軸方向に移動させて各フィンガーの先端が同じY軸方向高さでワークを掴むようにした。
(もっと読む)
3溝ドリル
【課題】鋳鉄の鋳抜き穴の仕上げ加工用及び鋳鉄を含む鉄鋼の無垢穴の仕上げ加工用の両方に使用できる3溝ドリルを提供。
【解決手段】ドリル本体外周面に形成された3個のチップ排出溝11と、ドリル本体端部に形成された3個のチゼル 5と、各チゼル 5の外方端部に連続して形成された3個の中心刃 6と、各中心刃 6の外方に連続する3個の主切れ刃 7とを有する3溝ドリルにおいて、ドリル本体端部中心部の第1先端角 1を 120°〜 160°の中凸とし、第1先端角 1の外方に続く第2先端角 2を 180°〜 190°の中凹とした。
(もっと読む)
ロボットシステム制御装置
【課題】冗長な自由度のロボットシステムの動作範囲を拡大しつつ適切に動作を行う。
【解決手段】ロボット10と旋回装置20を備えるロボットシステム1と、その教示点を入力する教示点入力装置37と、動作開始点と教示点とを正射影して求まる二点が旋回軸回りでなす角を旋回台の目標旋回角度とし、当該目標旋回角度に基づいて各補間点における旋回角度を算出する旋回角度算出部31と、各旋回角度に基づいてロボットの各関節角度を算出する関節角度算出部31と、算出された各旋回角度及び各関節角度からロボットシステムの再生動作の制御を行う動作制御部31とを備えている。
(もっと読む)
201 - 210 / 625
[ Back to top ]