
Fターム[2B063AA13]の内容
移植機(田植機の接地部) (1,596) | 目的、機能 (297) | 移植機等の性能向上 (291) | ローリング制御及びピッチング制御するもの (11)
Fターム[2B063AA13]に分類される特許
1 - 11 / 11
田植機
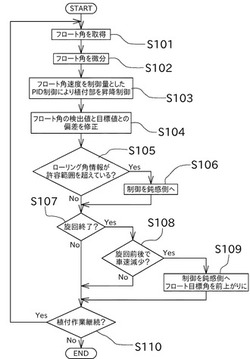
【課題】植付部の昇降制御の追従性を向上させた田植機を提供する。
【解決手段】田植機は、植付部と、フロートセンサと、制御部と、を備えている。植付部は、地面に接触可能なフロートを備える。フロートセンサは、フロートの揺動角を検出する。制御部は、フロートセンサの出力値の微分値を制御量としたPID制御(ステップS103)により、植付部を昇降制御する。また制御部は、フロートセンサが検出したフロートの位置と、前記フロートの位置の目標値と、の差をフロートセンサの検出値に基づいて修正する(ステップS104)。
(もっと読む)
作業車両

【課題】作業機の昇降制御を安定させた作業車両を提供する。
【解決手段】田植機は、植付部と、制御部と、を備える。制御部は、植付部の加速度(具体的にはフロート角加速度)を取得する。そして制御部は、前記加速度に二階微分ゲインKd2を乗じたものに基づいて、植付部の昇降制御を行う。このように植付部の加速度に基づいて昇降制御を行うことにより、植付部の上下速度の変動が大きい場合の振動的な応答を抑制できる。また、前記加速度は、圃場表面からの反力によって生じるため、当該加速度に基づいて制御を行うことにより、圃場の硬さに応じた制御動作を実現することができる。
(もっと読む)
農作業機
【課題】本発明の課題は、ローリング軸により農作業部と整地ロータとを共に左右ローリング可能にし、且つ、整地装置の支持構造並びに配置構成を強固でコンパクトに具現する。
【解決手段】昇降リンク装置の後端部に昇降する縦リンク51を備え、縦リンク51に設けた前後方向のローリング軸24を介して左右にローリングする取付フレーム52を縦リンク51の後側に設け、取付フレーム52に着脱する着脱ヒッチを介して農作業部を取付フレーム52の後側に設け、取付フレーム52に支持されて該取付フレームから後側に延びる整地装置支持フレーム54を設け、整地装置支持フレーム54に該整地支持フレームから前側に延びる上下回動アームを連結し、上下回動アームに整地フレーム56を連結して整地装置8を上下回動可能に支持し、前記整地装置支持フレーム54と整地フレーム56が機体側面視で重複して交差するように構成する。
(もっと読む)
田植機
【課題】走行部が傾斜しても整地装置を適切な位置で整地作業をすることができる田植機を提供する。
【解決手段】
走行部の後方に植付部を昇降自在に連結し、同植付部の前方に整地装置を昇降自在に取り付けた田植機において、走行部の前後方向の傾斜角度を検出する傾斜角度検出手段と、植付部の植付深さ位置を検出する植付深さ位置検出手段と、両検出手段の検出結果に基づいて整地装置の整地高さを算出補正する制御部と、同制御部により制御されて整地装置を昇降させる昇降用アクチュエータとを具備するようにしている。
(もっと読む)
歩行型水田作業機
【課題】歩行型水田作業機において、耕盤の小さな凹凸に沿って機体が右及び左に小さく頻繁に傾斜するような状態に加えて、耕盤の大きな凹凸に沿って機体が右及び左に大きく傾斜するような状態に対しても、適切に対応できるように構成する。
【解決手段】走行用の右及び左の車輪、機体に対する右及び左の車輪の高さに強制的に差を与えるローリング機構26、機体が田面と平行になるようにローリング機構26を作動操作するローリング操作手段31を備える。右及び左の車輪の昇降を許す融通部20をローリング機構26と右及び左の車輪との間に備え、機体に対する右及び左の車輪の高さの差を無くす方向に右及び左の車輪を付勢する付勢機構29を備える。
(もっと読む)
苗移植機
【課題】本発明では、圃場を滑走するフローとの前側に整地ロータを配設した苗移植機で、苗植付部の左右ローリングと対地高さの制御感度の調整時の制御方法に工夫を凝らすことで苗植付部の苗植え付け深さが均等になるようにすることが課題である。
【解決手段】走行車体の後部に整地ロータとフロートを備えた苗植付部を設け、水平センサが検出する苗植付部の左右の傾きとフロート迎い角センサの検出する圃場面の前後傾きでローリングモータと昇降用油圧電磁バルブを制御して苗植付部のローリングと昇降を制御する苗移植機において、各センサの検出信号に対する制御動作の感度を調整する感度調節手段を設け、該感度調節手段を鈍感に調整した場合に整地ロータの高さ調整量を標準よりも低く制御した。
(もっと読む)
乗用作業機
【課題】機体重量の変化の影響をあまり受けずに、圃場の凹凸や傾斜に対して、適正に機体姿勢を維持することができる乗用作業機を得ることを課題とする。
【解決手段】機体前部に操向操作される左右前輪10を設け、機体後部に左右後輪11を設けた乗用作業機において、左右前輪10は各々弾性部材81a・81bを介して機体に懸架すると共に、機体に設けた後輪ローリング軸A回りに回動自在に装着した後輪支持部材19の左右に左右後輪11を設け、機体に設けた左右傾斜センサ96の機体左右傾斜検出によって後輪支持部材19を後輪ローリング軸A回りに回動させて機体を水平に維持する左右後輪ローリング制御機構を設けた乗用作業機。
(もっと読む)
水田作業機の自動昇降制御装置
【課題】 走行機体の後部に昇降自在に連結した水田作業装置にセンサフロートを上下揺動自在に装備し、センサフロートの揺動角度を目標角度に維持するように水田作業装置を昇降制御するよう構成した水田作業機の自動昇降制御装置において、走行機体の前後傾斜を応答性良く的確に検知して、的確な目標角度補正を行い、安定した作業深さをもたらす昇降制御を実行できるようにする。
【解決手段】 走行機体に機体前後方向の角度変化を検知する角速度センサ31を設け、この角速度センサ31の検出情報に基づいてセンサフロートの目標角度θ0を自動補正する制御手段を備えてある。
(もっと読む)
農用作業機
【課題】 整地装置51を作業位置に下降させた植付作業中に走行機体が前後方向に傾斜しても、整地装置の接地状態の極端な変動を回避して、期待どおりの整地を行える農用作業機を提供する。
【解決手段】 整地装置51を昇降させる整地装置昇降シリンダ102を設け、制御部100は、傾斜センサ95の出力を読み込んで車体15の前後方向の傾斜角を求め、傾斜角に応じて整地装置昇降シリンダ102を作動させることにより、植付装置31に対する整地部52の高さ位置を刻々と調整する。そして、車体15が前上がりの場合には整地部52を水平な場合よりも少し下降させ、車体が前下がりの場合には整地部52を水平な場合よりも少し上昇させる。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
苗移植機
【課題】整地装置付き苗植付部のローリング精度の向上を図る。
【解決手段】走行車体2に設けた昇降リンク機構13により昇降自在の走行部側ベース14に整地ローリング軸16を介して整地ベース17を左右ローリング自在に設ける。整地ベース17に整地装置22を設けると共に、走行部側ベース14と整地ベース17との間を左右のローリングスプリング43,43で連結して整地ベース17を従動的に左右にローリング制御可能に構成する。整地ベース17には植付ローリング軸18により苗植付部19を左右ローリング自在に設けて、苗植付部19をローリングアクチュエータ21により整地ベース17のローリング制御状態に沿うように左右ローリング制御可能に構成する。
(もっと読む)
1 - 11 / 11
[ Back to top ]