
Fターム[2B075JA17]の内容
収穫機本体(特定作物用) (1,318) | 作業台、台車 (48) | レール上を走行するもの (5)
Fターム[2B075JA17]に分類される特許
1 - 5 / 5
果柄除去装置及び果実収穫装置
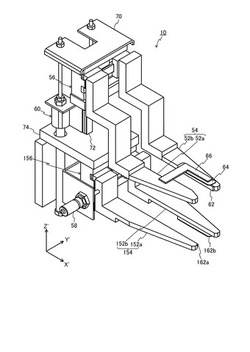
【課題】果柄の除去を容易にし、搬送中における果柄による果実の損傷を低減する。
【解決手段】上下動アクチュエータ60が、果柄の一部を把持する一対の第1フィンガ52a,52bを有する第1フィンガ部54と、第1フィンガ52a,52bに把持されている果柄を切断する一対の第2フィンガ152a,152bを有する第2フィンガ部154とを接近又は離間させ、第2フィンガ部が果実に接近したタイミングで、第2フィンガ部による切断を実行することで、第1フィンガ部により把持された果柄を、果実に近い適切な位置で切断する。
(もっと読む)
果実収穫装置

【課題】作業効率が高く且つ果実を傷めずに収穫可能な果実収穫装置を提供する。
【解決手段】栽培空間に複数の対象果実が吊下している果実の収穫装置1において、収穫装置は、鉛直方向に延設された支柱3にアーム機構が取り付けられ、アーム機構の先端に設けられた把持ハンド10で果実を把持して収穫するマニピュレータ2を備えており、アーム機構は、支柱3に第1の軸4を介して取り付けられ鉛直面内で屈曲する第1のアーム部5と、第1のアーム部5に第2の軸6を介して取り付けられ鉛直面内で屈曲する第2のアーム部7と、第2のアーム部7に第3の軸8を介して取り付けられ鉛直面内で屈曲する第3のアーム部9とを有する3軸のアーム機構であり、第3のアーム部9の先端に取り付けられた把持ハンド10が水平に維持されるように該第3のアーム部が駆動されるとともに、把持ハンド10と果実111との高さ方向及び奥行き方向の位置を合わせるように第1のアーム5部及び第2のアーム部7が駆動される構成とする。
(もっと読む)
農業用ロボット装置
【課題】ハウスの構造を変更することなく、ハウス内で連続的に長時間運用ができる農業用ロボットを提供する。
【解決手段】直線方向に移動が可能な移動機構を具備した台車4に、電力により稼働する作業機構5と、該移動機構及び該作業機構に電力を供給するための電源ケーブル6を収納した電源ドラム7と、前記電源ケーブルを前記電源ドラムから繰り出しまたは巻き取り動作と前記移動機構の動作を連動して移動を行う制御装置8とを搭載した農業用ロボットAと、該農業用ロボットを搭載して、上記台車の直線方向と交差する方向に往復動する移動台車Bとを連接した農業用ロボット装置である。
(もっと読む)
アスパラガス収穫を目的としたハンド装置
【課題】
被収穫物収穫作業をより省力化し、被収穫物収穫ロボットのハンド装置を低コストで提供する。
【解決手段】
視覚機構により検出された被収穫物を挟持する挟持手段と、上記被収穫物を切断する切断手段と、上記挟持手段と上記切断手段を連動する連動手段と、上記被収穫物の挟持、切断後、上記切断手段を初期位置に戻し、且つ切断した上記被収穫物の挟持を開放し、上記挟持手段の開放状態を保持する初期位置保持手段を有し、上記挟持手段と上記切断手段の少なくともどちらか一方は、弾性体の弾性力を用いて駆動することを特徴とするハンド装置を提供する。
(もっと読む)
農産物の処理装置
【課題】IDタグの生育情報や選別仕分け情報を入力して生育の相違を判断することができる農産物の処理装置を提供する。
【解決手段】作物毎に生育情報を入力したICタグを付設し、農産物を収穫する鋏やカッターなどの収穫器具の作動によってこのICタグに記憶された情報を、収穫農産物を収容するトレーやコンテナ等の収容体に付設したICタグに伝送すべく構成する。このとき作物毎のICタグ及び収容体のICタグを非接触型ICタグに構成し、このICタグは収穫器具の収穫操作による作動信号を受信することによって記憶された情報を所定の農産物収容体に付設したICタグに伝送する構成とした。
(もっと読む)
1 - 5 / 5
[ Back to top ]