
Fターム[2B304QA17]の内容
Fターム[2B304QA17]の下位に属するFターム
耕地と未耕地 (2)
Fターム[2B304QA17]に分類される特許
1 - 14 / 14
多目的機
【課題】 本発明の課題は、苗移植機と播種機を含む複数種の作業機を選択的に装着できる多目的機の汎用性を高めることである。
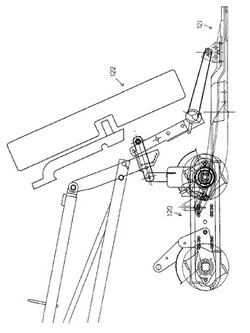
【解決手段】 走行車体の後端部に昇降リンクを設け、苗移植機と播種機を含む複数種の作業機を選択的に装着するべく、前記作業機を着脱可能な着脱ヒッチを昇降リンクの先端部に設けた多目的機において、ロータ部(120)を着脱ヒッチよりも走行車体側に設けた多目的機とした。
また、排水溝を形成する排水用の作溝器を、上下方向に回動するアームの回動先端部に設け、アームを回動付勢する作溝器押圧スプリングを設け、作溝器押圧スプリングを操作して排水用の作溝器の圃場への押し付け荷重を変更する排水用作溝器上下用モータを設け、昇降制御における制御感度又は圃場の硬軟の検知結果に連動して、排水用作溝器上下用モータの作動を制御する制御部を設け、アームと一体のスタンドを設けた多目的機とした。
(もっと読む)
田植機

【課題】土壌条件や植深をリアルタイムで取得できる田植機を提供する。
【解決手段】田植機は、土壌反力検出装置27と、植付爪22を備えた植付部と、土壌反力検出装置27の出力に基づいて苗の植深を算出する制御部と、を備えている。土壌反力検出装置27は、植付爪22に生じる土壌反力を検出する。また土壌反力検出装置27は、植付爪22の近傍に配置されるプローブ29と、ロードセル28とを備える。前記プローブ29は、植付爪22の長手方向と平行に配置された棒状部材であり、その一端側は植付爪22の先端と同じ方向を向くとともに、他端側はロードセル28の荷重検出面に当接している。
(もっと読む)
トラクター直装式ブームスプレーヤ
【課題】 ブームが実際に傾斜した場合にそのブームを速やかに、かつ適正に回動制御して迅速な傾斜角度の補正ができるトラクター直装式ブームスプレーヤを提供する。
【解決手段】 ブーム4が基部フレーム3に対してその重心近傍で回動自在に支持されているとともに、ブーム4を正逆方向に回動させるブーム回動手段8と、前輪車軸24の車体21に対する相対的な傾斜角度を計測する前輪傾斜角度計測手段9と、走行面の凹凸により後輪が傾斜する前に、前輪車軸の相対的な傾斜角度の方向と反対方向にブーム4を回動させるための準備をブーム回動手段8に実行させるブーム回動準備制御手段11と、ブーム4の基部フレーム3に対する相対的な傾斜角度を計測するブーム傾斜角度計測手段10と、ブーム4の相対的な傾斜角度が所定の範囲を超えた場合、回動準備中のブーム回動手段8を駆動してブーム4を制御するブーム回動制御手段12とを有する。
(もっと読む)
苗移植機
【課題】
走行車体が左右方向に傾斜すると、苗植装置が圃場面に対して略左右水平姿勢となるようにローリング駆動させ、苗の植付姿勢を安定させる苗移植機を提供する。
【解決手段】
圃場を走行する走行車体2の後部に苗を積載する苗載せ台4と、苗載せ台4の下部に苗載せ台4から苗を取って圃場に植える植付装置5からなる苗植装置6を設け、苗植装置6の傾斜量を検出する傾斜検知部材53を設け、傾斜検知部材53の検知に合わせて苗植装置6を左右方向に回動させるローリング機構Rを設けた苗移植機において、走行車体2に圃場の凹凸に対応して上下回動するローリング機構R2を設け、走行ローリング機構R2に所定量以上の回動を検知する走行ローリング検知部材49L,49Rを設け、走行ローリング検知部材49L,49Rが所定量以上の回動を検知したとき、ローリング機構Rの作動速度を減速させる構成とする。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
苗移植機
【課題】フロートの前側に夾雑物が溜まることがあっても、苗の植え付け深さを適正に行うことができる苗移植機を提供すること。
【解決手段】センターロータ27bのカバー37の後端部を開閉可能にし、カバー37の後端部に回動自在に取り付けられた回動角度センサ39aにより作業中に接触体39が開閉したことを検知すると接触体39に夾雑物が引っかかったと判断し、油圧バルブ48が昇降油圧シリンダ46を伸張させて苗植付部4を上昇させる。これによりフロート55,56と圃場面との間に空間部が生じて夾雑物がフロート55,56に引っかかることを防止できるて苗の植付深さが正確に検知されて植付精度が向上し、フロート55,56に引っかかった夾雑物を取り除く作業が必要無くなり作業能率が向上する。また、昇降用油圧シリンダ46の伸縮制御感度を敏感側にして苗植付部4を瞬間的に浮かせることで整地ロータ27aが夾雑物を乗り越えることができるようにする。
(もっと読む)
作業車両の制御装置
【課題】安価で、しかも作業機のローリング制御をタイミング良く行うことができるトラクタなどの作業車両を提供すること。
【解決手段】走行車両1に連結する作業機3が、走行車両1の旋回時に作業機3を上昇させないで圃場上に降ろしたまま旋回して作業する圃場の代かき作業機3である場合、このような作業時には、走行車両1は圃場の水平面上を比較的高速で走行しながら旋回するため遠心力が作業機3に作用し、スロープセンサ10はその遠心力によって、該センサ10中の粘性液が傾き、機体が傾斜したと判定してしまい、水平シリンダ16を伸縮し、作業機3が水平からずれてしまうことがある。そこで、ハンドル切れ角により旋回径を算出し、その旋回径と車速によりスロープセンサ10に働く遠心力によるスロープセンサ値の変化を補正値としてスロープセンサ検出値に加減算することで、実際の走行車両1の傾斜を判断でき、作業機3が水平となる。
(もっと読む)
直播機
【課題】硬軟センサの設置位置を工夫することにより、苗植付深さ又は播種深さの制御度合いを高めた直播機を提供すること。
【解決手段】走行車体2の後部に複数条分の種子を圃場に移送する移送管93,95を備えた直播装置82と移送管93,95の種子排出口を圃場上に向けて保持するフロート55,56を走行車体に対して油圧シリンダ46とリンク装置3により昇降自在に設け、フロート55,56の前方に接地して地面を整地するロータ27a,27bを直播装置82に対して昇降自在に設け、フロート55,56とロータ27a,27bの間に圃場の硬軟センサ114を設け、該センサ114の検出値に応じて油圧シリンダ46を伸縮して直播装置82の播種深さを調節する制御装置101を設けている。
(もっと読む)
苗移植機
【課題】本発明では、圃場を滑走するフローとの前側に整地ロータを配設した苗移植機で、苗植付部の左右ローリングと対地高さの制御感度の調整時の制御方法に工夫を凝らすことで苗植付部の苗植え付け深さが均等になるようにすることが課題である。
【解決手段】走行車体の後部に整地ロータとフロートを備えた苗植付部を設け、水平センサが検出する苗植付部の左右の傾きとフロート迎い角センサの検出する圃場面の前後傾きでローリングモータと昇降用油圧電磁バルブを制御して苗植付部のローリングと昇降を制御する苗移植機において、各センサの検出信号に対する制御動作の感度を調整する感度調節手段を設け、該感度調節手段を鈍感に調整した場合に整地ロータの高さ調整量を標準よりも低く制御した。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部が水平基準面に対して傾斜しながら刈取走行する場合であっても、刈取部が地面に接触することを回避することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部の対地高さが目標対地高さになるように昇降操作手段C1を制御する刈取昇降制御、並びに、刈取部の水平基準面に対する傾斜角が目標傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段Hが、刈取昇降制御として、目標傾斜角設定手段50にて設定された目標傾斜角が、刈取部が水平姿勢又はそれに近い姿勢に対応する設定範囲を外れている場合には、刈取部が目標傾斜角になったと仮定したときに、下位側に位置する対地高さ検出手段Aについての目標対地高さとして、目標対地高さ設定手段54にて設定された目標対地高さを設定量高い側に補正した補正目標対地高さを定める目標高さ補正処理を実行する。
(もっと読む)
均平作業方法
【課題】
高低差のある圃場等の区画を、牽引車両に牽引される均平機を用いて均一平面にする方法において従来はレーザ光を基準にして、均平板に土を抱えられる程度に高さを保持し、土を抱えなくなったら徐々に均平板を下げることを繰り返しながら均一にしていた。その結果最後まで均一高さにならず、均平作業後半で低い部分があった場合には、全体から広く薄く運土せねばならず非効率的であった。また、オペレータは常に後方を振り返り均平板の土の様子を見ながら作業せねばならず危険であった。
【解決手段】
本願は均平作業前に圃場高さを測定し、均平にしたときの均平基準面高さを算出し、基準高さと比較した高低マップを運転席に表示し、均平作業中もリアルタイムに測定し高低マップを書き換え、効率的に作業を行えるようにした均平方法である。
(もっと読む)
水田作業車
【課題】走行速度が変わっても苗植付部4の苗植付装置42の圃場に対する昇降制御を適切に行える水田作業車を提供すること。
【解決手段】水田作業者の走行速度が速いと硬軟センサ47が圃場の土壌が硬いと判断する傾向にあり、逆に走行速度が遅いと硬軟センサ47が圃場の土壌が軟らかいと判断する傾向にあるため、走行速度が急激に変化すると硬軟センサ47の検出値が不適正に変化して不安定になり、苗植付部4の昇降制御における制御感度が不適正になるおそれがある。これに対処するため、本実施例では、所定時間内に油圧式無段変速装置22の変速比又はエンジン回転数が所定以上変化して水田作業者の走行速度が急激に大きく変化すると硬軟センサ47の検出結果を無視するように制御装置48を機能させ、苗植付部4の昇降シリンダ33の作動制御を停止する。こうして、硬軟センサ47の誤検出の影響を苗植付装置42が受けない。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘機が地面から離れて非耕耘位置に移動して1行程の耕耘作業を終了するときに、最終的に形成される盛り土及び耕耘跡穴を均すように、耕耘機の姿勢制御を実行できる農作業機の耕耘制御装置を提供する。
【解決手段】作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、耕耘機を昇降動する昇降制御アクチュエータと、耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、耕耘機の耕耘爪の耕耘深さを設定する耕耘深さ設定器と、昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、耕耘制御手段は、リヤカバーが耕耘位置から最閉位置に移動するまでの間は耕耘機をゆっくり上昇させて、耕耘爪による耕土の盛り上がりや耕耘跡穴を小さくし、リヤカバーが離陸した高さから旋回時の高さまでは急激に上昇させるパターンで制御するものである。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
1 - 14 / 14
[ Back to top ]