
Fターム[2B382LA18]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 制御、連動のための検出対象又は検出量 (268) | 長さ、距離、間隔又は位置 (167) | 制御モード切換、制御開始又は中止の位置 (57) | 刈高さ制御域 (47) | 刈高さ下限 (24)
Fターム[2B382LA18]に分類される特許
1 - 20 / 24
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置
【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバインの刈高さ制御装置

【課題】
比較的大きな凹凸部がある圃場での刈取作業でも、刈取部の分草杆の地面への突入を防止しながら刈取作業を行なえるものとする。
【解決手段】
刈取搬送部(7)を昇降させる昇降手段(15)と、刈取搬送部(7)の対地高さを検出する刈取接地センサ(SE2)と、刈取搬送部(7)の対機体高さを検出する刈高さセンサ(SE3)とを備えたコンバインにおいて、刈高さセンサ(SE3)の検出値と目標刈高さ設定値に基づいて昇降手段(15)を作動させる刈高さ昇降制御を実行し、刈高さ昇降制御の実行中に刈取接地センサ(SE2)によって検出される刈取搬送部(7)の対地高さが、刈取接地センサ(SE2)の接地部が地面より上方に離れた場合に検出される離間基準値以上の値になった場合に、刈取搬送装置(7)を下降させる側の出力を停止するコントローラ(21)を設ける。
(もっと読む)
コンバインの前処理昇降制御装置
【課題】刈高さ解除制御で下降させ過ぎた前処理部を少しだけ上昇させるためにマルチステアリングレバーを上昇操作すると、刈高さ解除制御のためにトリガースイッチを操作していることで前処理部が自動上昇駆動してしまい、オペレータの想定を超えて前処理部が上昇するという課題があった。
【解決手段】刈高さ解除制御手段(21C)の作動中は、前処理操作検出手段(22)による昇降操作レバー(11)上昇操作を入力しても、自動昇降制御手段(21A)による前処理部(5)の自動上昇駆動を行わないように牽制した。
(もっと読む)
コンバイン
【課題】圃場面が硬い場合も軟弱な場合も、接地部のスムーズな接地摺動を現出させることができるとともにとともに軟弱圃場での接地部による移動抵抗の増大や接地部への土の乗り上がりの発生を回避しやすいコンバインを提供する。
【解決手段】刈取り部10を接地追従するよう走行機体に昇降自在に支持させてある。刈取り部10を接地支持する接地部18を、接地部18の前端側に位置した支点Pまわりに上下揺動する姿勢変化をさせる姿勢変更手段40を介して刈取り部10の分草杆13に支持させてある。
(もっと読む)
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
コンバイン
【課題】収穫作業中の車台水平制御出力によって、刈取昇降制御装置が地面に突っ込むことを防止する。
【解決手段】車台(11)を支持する左右一対の走行装置(10)に、該走行装置(10)を左右独立して昇降させる昇降機構を設け、車台(11)の前部には刈取前処理装置(13)を刈取昇降シリンダ(19)で昇降自在に設け、該刈取前処理装置(13)の地上高を刈幅方向の複数個所で検出する接地高さセンサ(25)を設け、該接地高さセンサ(25)で検出された地上高に基づいて走行装置(10)の昇降機構を制御して刈取前処理装置(13)を所定の地上高に維持するコンバインにおいて、接地高さセンサ(25)で検出された地上高が予め設定された下限高さ以下となった場合に、走行装置(10)の昇降機構への水平制御指令を停止する構成とする。
(もっと読む)
コンバイン
【課題】本発明は、コンバインの刈取部を自動制御で昇降するようにした構成で、自動で昇降させる範囲の設定を容易にすることを課題とする。
【解決手段】車台11の前部に昇降可能に設ける刈取前処理装置13の地上高を検出する刈取高さ検出手段2を設け、該刈取高さ検出手段2の検出する地上高に基づいて刈高さ制御処理装置38で刈取前処理装置13を制御下限位置から制御上限位置の範囲で昇降制御するコンバインにおいて、刈高さ制御処理装置38を調整記憶モードに切換えると、刈取前処理装置13の昇降移動率を監視し、昇降移動を一定時間停止した位置を制御下限位置と制御上限位置として記憶すべくしたことを特徴とするコンバインの刈取昇降制御装置とする。
(もっと読む)
コンバインによる収穫方法とこの収穫方法に使用するコンバイン
【課題】刈取り前処理部の圃場への突っ込みや沈み込みを防止しながら収穫作業できるコンバインによる収穫方法を提供する。
【解決手段】刈取り前処理部10に作用する下降ストッパー手段8を効かせ、刈取り前処理部10を地面から設定刈り高さに浮上した連結高さに支持させながら、かつ、刈取り前処理部10が接地反力によって上昇操作されることを許容しながら収穫走行する。
(もっと読む)
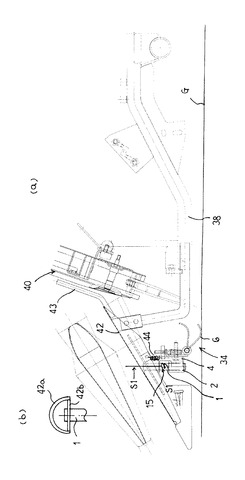
ヘッジトリマ
【課題】 作業時に糸を張るなど、作業者の負担を増加させることなく、良好な仕上げ面を得ることができる利便性の高いヘッジトリマを提供することを目的とする。
【解決手段】
動力源と、ハンドルと、前記動力源により駆動され往復動する駆動刃部を有するヘッジトリマにおいて、レーザを所定の位置に受光すると、信号を発するレーザ受光器を前記刃部の上面部に設けた。また、前記受光器は、前記刃部上面部に複数設けることができ、それぞれヘッジトリマの状態に応じた光信号を発することができるので、作業者は常に適切な状態で作業を行うことが可能となる。
(もっと読む)
コンバインの制御装置
【課題】走行車体が左右に傾いても刈取装置が刈る穀稈の位置が左右で均等になるようにして、刈取脱穀作業の円滑化と圃場の刈跡の美観向上を図る。
【解決手段】刈取装置(30)前端の左右の分草杆(1a,1d)に対地高さを検出する左右の非接触式の対地距離センサ(2a,2d)を夫々設け、刈取走行中に左右両方の対地距離センサ(2a,2d)が制御下限高さ以下を検出すると刈取装置(30)を上昇制御し、左右の対地距離センサ(2a,2d)の片側のみが制御下限高さ以下を検出すると左右両方の対地距離センサ(2a,2d)が制御下限高さ以上を検出するように走行車体をローリング制御する構成とした。
(もっと読む)
刈取収穫機の刈取部昇降構造
【課題】刈取収穫機の刈取部昇降構造において、例えば畦際での旋回が終了して刈取部を圃場面に下降させて次の刈取行程に入る場合、刈取部の先端部分が圃場面の凸部に突っ込むような状態を少なくする。
【解決手段】刈取部4を昇降駆動する昇降機構と、人為的に操作される昇降操作具とを備える。上方に設定された上昇限度UU1及び下方に設定された下降限度DD1の範囲において、昇降操作具の操作により昇降機構を上昇側及び下降側に作動操作、昇降操作具の操作により昇降機構を停止操作する制御手段を備える。制御手段の下降限度DD1を高低に変更する変更手段を備える。
(もっと読む)
コンバイン
【課題】刈取り作業中に前処理部を所定の高さまで上昇させた時、前処理部の駆動を自動的に停止させる前処理部駆動停止制御を備えたコンバインにおいて、前記前処理部駆動停止制御を実行可能状態または実行不能状態に切替えることができる切替え操作手段の操作性を向上させる。
【解決手段】コンバインの操縦部4に備える主変速レバー19の前方近傍に、前処理部駆動停止制御を実行可能状態または実行不能状態に切替える切替え操作手段62を配設すると共に、該切替え操作手段62としてダイヤル付スイッチを採用し、このダイヤル63を介して前処理部6の下降限高さを設定できるように構成した。
(もっと読む)
コンバインの刈り高さ制御装置
【課題】本発明では、コンバインの操縦操作に不慣れのオペレータが収穫作業を行っても刈取装置を下げ過ぎて泥刈りを行うようなことが無くなるようにすることを課題とする。
【解決手段】刈取装置(1)の高さを設定された昇降限界範囲内で調整可能に構成し、刈取装置(1)がこの昇降限界範囲を外れて下降したことを検出する下降限界センサ(2)とこの下降限界センサ(2)からの検出信号に基づいて刈取装置(1)の下降動作を停止させる定点停止制御手段を設け、定点停止スイッチ(3)をオンすることで該定点停止制御手段が有効となる構成とした。また、下降限界センサ(2)の検出信号に基づいて刈取装置(1)の上昇を停止する構成とした。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 対地高さ検出手段が地面の凹部に対応する位置にて対地高さを検出することがあっても、刈取部が地面に突っ込むことを回避することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 対地高さ検出手段A及び目標対地高さ設定手段54の情報に基づいて、刈取部2の対地高さが目標対地高さになるように昇降操作手段C1を制御する制御手段Hは、対地高さ検出手段Aが目標対地高さよりも低い値を検出すると、そのときの対機体高さセンサ59の検出値を上昇時対機体高さとして記憶しかつ刈取部2を上昇させ、且つ、対地高さ検出手段Aが目標対地高さよりも高い値を検出すると、対機体高さセンサ59の検出値が上昇時対機体高さよりも低くかつ対地高さ検出手段Aの検出値が検出可能範囲の最大対地高さになっている下降禁止条件が満たされていなければ刈取部2を下降させる。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部の損傷を回避することができながらも、刈取作業を良好に行えるようにすることが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】姿勢制御実行モードの場合には、複数の対地高さ検出手段Aのうちの2個以上の対地高さ検出手段Aが又は全ての対地高さ検出手段Aが目標対地高さよりも低い値を検出する多数検出状態である場合に刈取部2を上昇させ、かつ、姿勢制御停止モードの場合には、複数の対地高さ検出手段Aのいずれかが目標対地高さよりも低い値を検出する少数検出状態である場合に刈取部2を上昇させる形態で、昇降操作手段C1を制御する。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部が地面に突っ込むことにより刈取部が損傷することを回避しながら、倒伏している茎稈の刈取作業を行う場合において刈取作業を良好に行えるようにすることが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部の対地高さを検出する非接触式の対地高さ検出手段Aが、刈取部における刈幅方向に位置を異ならせて2個備えられ、目標対地高さが制御状態切換用設定高さよりも高いときには、2個の対地高さ検出手段Aのいずれかが目標対地高さよりも低い値を検出する少数検出状態である場合に刈取部を上昇させ、且つ、目標対地高さが前記制御状態切換用設定高さ以下であるときには、2個の対地高さ検出手段Aの夫々が目標対地高さよりも低い値を検出すると刈取部を上昇させるように昇降操作手段C1を制御するよう構成されている。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部の損傷を回避することができながらも、刈取作業を良好に行えるようにすることが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 走行機体Vの走行速度を検出する走行速度検出手段60が設けられ、制御手段Hが、刈取昇降制御として、走行速度検出手段60にて検出される走行速度が設定速度以上である場合には、複数の対地高さ検出手段Aのいずれかが目標対地高さよりも低い値を検出する少数検出状態である場合に刈取部2を上昇させ、且つ、走行速度検出手段60にて検出される走行速度が設定速度未満である場合には、複数の対地高さ検出手段Aのうちの2個以上の対地高さ検出手段Aが又は全ての対地高さ検出手段Aが目標対地高さよりも低い値を検出する多数検出状態である場合に刈取部2を上昇させる形態で、昇降操作手段C1を制御する。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】 刈取部が水平基準面に対して傾斜しながら刈取走行する場合であっても、刈取部が地面に接触することを回避することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】 刈取部の対地高さが目標対地高さになるように昇降操作手段C1を制御する刈取昇降制御、並びに、刈取部の水平基準面に対する傾斜角が目標傾斜角に維持されるように姿勢変更操作手段の作動を制御する姿勢制御を実行する制御手段Hが、刈取昇降制御として、目標傾斜角設定手段50にて設定された目標傾斜角が、刈取部が水平姿勢又はそれに近い姿勢に対応する設定範囲を外れている場合には、刈取部が目標傾斜角になったと仮定したときに、下位側に位置する対地高さ検出手段Aについての目標対地高さとして、目標対地高さ設定手段54にて設定された目標対地高さを設定量高い側に補正した補正目標対地高さを定める目標高さ補正処理を実行する。
(もっと読む)
コンバインの前処理部制御機構
【課題】穀稈の刈り取り等を行う前処理部の誤った昇降操作を防止する制御機構を備えたコンバインを提供することを課題とする。
【解決手段】穀稈の刈り取りを行う前処理部3が昇降自在に設けられた走行機体2の前後進操作を行う主変速レバー6と、上記前処理部3の昇降操作を行う昇降レバー7と、上記走行機体2の走行を検出する走行検出部13と、上記昇降レバー7の昇降操作を検出する昇降操作検出部12と、上記走行検出部13及び昇降操作検出部12からの検出情報を処理して前処理部3の昇降制御を行う制御部11とを備えたコンバインにおいて、走行機体2が後進状態にあることを検出した際には、昇降レバー7による前処理部3の下降操作を検出しても前処理部3の下降を規制する規制手段を上記制御部11に設ける。
(もっと読む)
コンバイン
【課題】 刈取り部の地面への突っ込みを良好に抑制しながら刈取り部を接地追従させることも、高刈りを発生しにくくしながら刈取り部を接地追従させることも可能なコンバインを提供する。
【解決手段】 自走機体の前部に揺動昇降自在に連結された刈取り部10に設けた接地部と、刈取り部10の接地部での接地圧が減少するよう刈取り部に支持作用するバランスバネ21とを備えている。バランスバネ22は、刈取り部10の荷重による弾性変形操作の限界に至ることによって刈取り部10の自走機体に対する下降限界を設定する。刈取り部10のバランスバネ21によって設定される下降限界を変更する下限調節手段31を備えてある。下限調節手段31は、刈取り部10が上昇ストロークエンドから下降するに伴ってバランスバネ21が刈取り部に10対する支持作用を開始するときの刈取り部13の自走機体に対する連結高さを変更し、これによって刈取り部10の下降限界を変更する。
(もっと読む)
1 - 20 / 24
[ Back to top ]