
Fターム[2D015GB05]の内容
Fターム[2D015GB05]に分類される特許
1 - 20 / 31
複数リンク型重機に於ける反力荷重推定方法及び装置
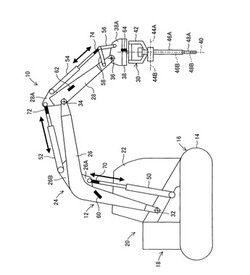
【課題】複数リンク型重機において、対象物より受ける反力荷重を正確に且つ確実に推定する方法及び装置を提供する。
【解決手段】相対的に枢動可能に直列的に連結された複数のリンクを有し、複数のリンクは重機本体20に枢支された基幹リンク26と対象物に必要な作用を行う先端リンク30とを含む複数リンク型重機10が対象物より先端リンクの作用点にて受ける反力荷重を推定する方法及び装置であって、各リンクについて作用点に作用する反力荷重を求めるためのラグランジェの運動方程式を導出し、各リンクの回転角を検出すると共に、各リンクの重機本体側の枢軸線の周りのトルクを推定し、これらに基づいてラグランジェの運動方程式を解くことにより反力荷重を演算し、反力荷重に基づいて先端リンクが作用点にて対象物より受ける反力荷重を演算する。
(もっと読む)
建設機械の制御装置

【課題】電動モータを動力源とする建設機械において、低温での作動時における電動モータの破損を防止しうる建設機械の制御装置を提供する。
【解決手段】電動モータ26の温度を温度センサ33により検出する。電動モータの検出温度が基準温度より低い際に、操作レバー22の操作量に対する吐出流量制御装置46を操作する電磁比例弁47のソレノイド47aへの出力電流を制限する。これにより、電動モータ26の温度が低い際には、電動モータ26の負荷が軽減され、低温での電動モータ26の破損が防止される。
(もっと読む)
電動式建設機械の制御機構および制御方法
【課題】スターデルタ回路で始動する電動モータにより油圧ポンプを駆動する電動式建設機械において、簡単な機構により、始動時の電動モータの過負荷と急動作を防止する。
【解決手段】電動式建設機械は、制御機構として、コントローラと、油圧ポンプからのアクチュエータへの油圧系統をロックするロック機構にロックまたはロック解除の指示を与えるロックレバーと、ロックレバーの解除を制限するソレノイドロックとを備える。コントローラは、電動モータのスター回路の駆動信号を検知しているときに、ロックレバーの解除を制限するように、ソレノイドロックのリレーを励磁させて、ソレノイドロックを機械的にロックするように動作させ、電動モータのスター回路の駆動信号を検知しなくなったときに、ソレノイドロックのリレーを励磁をやめて、ソレノイドロックのロックを解除させる。
(もっと読む)
油圧ショベルの操作システム
【課題】多関節フロントに対する過酷な過負荷での作業状態を回避することが可能となり、過負荷による多関節フロントの損傷回避や延命化が図れる油圧ショベルの操作システムを提供する。
【解決手段】ブームシリンダやアームシリンダの各油圧操作式コントロール弁24〜26のパイロット弁として比例電磁弁28〜33を備える。比例電磁弁28〜33は、それぞれ操作量に応じた電気信号を出力する電気式操作レバー35〜37からの電気信号を受けるコントローラ38により操作される。ブームおよびアームの少なくともいずれかに過負荷検出用の歪ゲージ17,18を設ける。掘削作業の際に、歪ゲージ17,18により検出される負荷信号が基準値を超えたときに比例電磁弁29,30,32への操作信号を抑制する信号抑制手段を備える。
(もっと読む)
油圧ショベルの制御装置
【課題】旋回中にフロント作業機に旋回方向の反力が作用する場合に確実に警告できる油圧ショベルの制御装置を提供する。
【解決手段】下部走行体、下部走行体に旋回自在に搭載される上部旋回体、上部旋回体のフレームに俯仰自在に設置されるフロント作業機を備える油圧ショベルの制御装置6である。
そして、油圧ショベルの制御装置6は、上部旋回体の旋回状態を計測する旋回計測手段71と、フロント作業機に作用する旋回方向の反力を計測する反力計測手段72と、旋回計測手段71によって計測された旋回状態及び反力計測手段72によって計測された反力作用に基づいて旋回中に前記フロント作業機による作業が行われているかどうかを判定する判定手段70と、判定手段70によって旋回中に他の作業が行われていると判定されると警告を発する警告手段80とを備えている。
(もっと読む)
作業機の油圧制御システム
【課題】 第1ポンプからの作動油を供給する手段と、第2ポンプからの作動油を第1ポンプの作動油に加えて供給する手段とを有する作業機において、第2ポンプによる作動油の供給を不用意に設定してしまうことを確実に防止することができるようにする。
【解決手段】コントローラ70は、第1指令スイッチ73による指令開始後、第1制限時間内に第2指令スイッチ74による指令開始が行われ、第2指令スイッチ74による指令終了が第2制限時間内に行われ、且つ、第2指令スイッチ74による指令が指令継続時間以上となっているときに、第1作動油供給手段と第2作動油供給手段とでの作動油供給を有効にする。
(もっと読む)
移動体の管理装置
【課題】移動体がいずれの時点で過酷な使われ方をされたかを容易に判断できるようにし、致命的な故障を未然に防止する。
【解決手段】異常検出手段の検出結果と計時手段の計時結果とが、移動体から端末装置に送信される。そして端末装置は、送信された情報(警報出力マップ)に基づいて移動体を管理する。警報出力マップから、移動体がいずれの時点で過酷な使われ方をされたかを容易に判断することが可能となり、致命的な故障に至る前に措置をとることができ損失を未然に防止することができる。
(もっと読む)
油圧ショベルのアタッチメント制御装置
【課題】オペレータが通常のモードからアタッチメントモードに切り換えることを忘れ、アタッチメントを操作してしまった場合のアタッチメント及びその他の油圧機器の故障や寿命低下を防止することができる油圧ショベルのアタッチメント制御装置を提供する。
【解決手段】
油圧ポンプ3と、アタッチメント用アクチュエータであるブレーカ110を含む複数のアクチュエータと、操作ペダル装置7からの操作パイロット圧により切り換わり、油圧ポンプ3の吐出油をアタッチメント用アクチュエータに供給するアタッチメント用流量制御弁B4を含む複数の流量制御弁とを備えた油圧回路を有する油圧ショベルのアタッチメント制御装置において、アタッチメント選択装置20によってアタッチメントモードが選択されていない状態で操作ペダル装置7を操作したときに、アタッチメント用アクチュエータの動作を制限する。
(もっと読む)
作業機械の油圧回路
【課題】油圧ポンプを高トルクに維持する一方、トルクオーバーを防止し、エンジン回転速度の変動を少なくして燃料消費を低減させることができる作業機械の油圧回路を提供する。
【解決手段】エンジン12で駆動される可変容量油圧ポンプ14と、該油圧ポンプ14の吐出圧の増加に応じて吐出量を減少させて該油圧ポンプ14の出力トルクを略一定に維持する吐出量制御手段24と、を備えた作業機械の油圧回路において、前記油圧ポンプ14の吐出圧の急上昇を事前に検出する吐出圧急上昇事前検出手段18、26と、前記エンジン12の回転駆動力が前記エンジン12の補器類に伝達される程度を制御する回転駆動力伝達制御手段26、60、62と、を備え、前記油圧ポンプ14の吐出圧が急上昇すると事前に判断したとき、前記エンジン12の補器類に伝達される回転駆動力を減少させる。
(もっと読む)
高さ調節可能なリフト装置を備えた貨物運搬車
【課題】高さ調節可能なリフト装置を備えた貨物運搬車における転倒危険をさらに低減させることである。
【解決手段】貨物運搬車は、貨物を受け取るための高さ調節可能なリフト装置と、さらに少なくとも1つの運動方向の加速度を測定するための加速度センサ装置と、受け取られた貨物重量を決定するためのセンサと、前記リフト装置のリフト高さを決定するためのセンサと、を備えている。制御/操作装置内において、走行状態を調節する少なくとも1つの車両内装置を設定するための操作信号が発生可能である。加速度センサ装置はリフト装置上に配置されている。
(もっと読む)
建設機械
【課題】防振マウントの緩衝機能を生かしながら、キャブをアッパーフレームから引き剥がす方向の外力に対してガード部材を有効に作用させる。
【解決手段】キャブ4が防振マウント9…を介して上部旋回体のアッパーフレーム3に取付けられた建設機械において、転倒時にキャブ4を防護するためのガード部材10をキャブ4の前面部と天井とに跨ってに取付ける。このガード部材10の、キャブ前面部を覆う前側部分11の下端部をアッパーフレーム3の前端部に対し、防振マウント9…によるキャブ4の上下及び水平方向の移動を許容する係止機構15によって止め付けた。
(もっと読む)
作業機械の学習診断システム、状態診断装置及び状態学習装置
【課題】作業機械の学習診断システムにおいて、様々なセンサ情報に対して汎用的に作業機械の異常診断を行うことができ、しかも動作状態間の遷移状態である過渡動作状態においても異常診断を可能とすることで作業機械の故障を未然に防止する。
【解決手段】状態学習装置201は、入力したセンサデータ101aを定常動作状態と過渡動作状態のものに分類して、学習によりそれぞれ許容誤差を含む定常状態データ102a及び中間状態データ103aを生成する。状態診断装置202は、その定常状態データ102aを用いて、入力したセンサデータに係わる作業機械の動作状態が定常動作状態であるか過渡動作状態であるかを識別しかつ定常動作状態における異常判定を行うとともに、中間状態データ103aを用いて識別した過渡動作状態における異常判定を行う。中間状態データ103aは中間点情報も含む。
(もっと読む)
建設機械の油圧回路における圧力検出システム
【課題】操作具操作に基づいて二つのパイロットラインのうち何れか一方に択一的にパイロット圧を出力するパイロット圧出力手段を備えた建設機械において、出力されたパイロット圧の圧力を検出するにあたり、圧力センサの数を減らして、コストダウンを図る。
【解決手段】パイロット圧の圧力を検出する圧力検出手段を、下降側パイロットライン18へのパイロット圧出力の有無を検出する圧力スイッチ20と、下降側、上昇側パイロットライン18、19のうち高圧側の圧力を選択するシャトル弁21と、該シャトル弁21により選択された高圧側の圧力を検出する圧力センサ22とを用いて構成した。
(もっと読む)
建設機械
【課題】屈曲自在な作業腕の先端部に作業アタッチメントが装着される建設機械において、機体安定性を確保しながら効率よく作業できるように構成する。
【解決手段】解体作業機1の制御装置17に、アタッチメント位置Pを検出する作業位置演算部42と、アタッチメント位置Pに基づいて機体の安定姿勢を確保できる許容作業範囲を判断する作業範囲判断部43と、作業アタッチメントに作用する外力としての負荷値Fを演算する負荷演算部45と、該負荷演算部45により演算される負荷値Fに基づいて機体バランスを判断し、安定姿勢を損なう惧れがあると判断することに伴い警告を発する過負荷判断部46とを設ける構成とする。
(もっと読む)
流体圧回路および作業機械
【課題】リリーフ弁でのエネルギ損失を抑制するように事前警告できる流体圧回路を提供する。
【解決手段】コントロール弁25は、タンク22内からメインポンプ24により吐出してブームシリンダ14、スティックシリンダ16およびバケットシリンダ18などに供給する作動流体を方向制御する。リリーフ弁28は、スティックシリンダ16またはバケットシリンダ18に供給する作動流体が設定圧力を超えるときはこの作動流体をタンク22に戻すことで設定圧力を保つ。警告手段41は、スティックシリンダ16またはバケットシリンダ18に作用する負荷圧がリリーフ弁28で設定されたリリーフ圧より低い警告圧に達したときにブームシリンダ14を負荷逃がし方向に作動する圧力設定弁46を備えている。
(もっと読む)
車両の制御装置
【課題】高速降坂走行時の旋回運動に起因するステアリングブレーキの損傷を防止することができる車両の制御装置を提供する。
【解決手段】例えばブルドーザ1の車体コントローラ70はブレーキプロテクト制御部70cを有し、ブレーキプロテクト制御部70cは、最高速度段である3速速度段23が選択されている状態で、ブルドーザ1が第1所定傾斜角度θ1以上での降坂走行状態にあることが検出されるとともに、エンジン6の回転速度が所定回転速度Nsを超えていることが検出され(ステップS2〜ステップS4)、かつ操向レバー55が左旋回操作または右旋回操作されていることが検出されたとき(ステップS5)、所定回転速度Nsを目標値とするエンジン回転速度指令信号N1をエンジンコントローラ71に向けて出力する(ステップS6)ものとする。
(もっと読む)
解体作業機の安全監視装置
【課題】フロントアタッチメントを交換した際に、作業者によるアタッチメントの確認作業を不要にし、人為的ミスや確認作業の手間をなくすことができる解体作業機の安全監視装置を提供する。
【解決手段】作業内容に応じて交換可能なフロントアタッチメントをロアブームに連結する際、連結したフロントアタッチメントの種類を検出する検出手段(8a,8d)を設け、検出手段(8a,8d)の検出結果に基づき連結したフロントアタッチメントの種類を判別し、連結したフロントアタッチメントにおける車体全体の重心位置情報をモニタに表示させる。
(もっと読む)
荷重負荷機械
【課題】本発明は、機体バランスを高精度に算出して即応性の高い転倒回避を行うことができる荷重負荷機械を提供することにある。
【解決手段】本発明は、地面に接地する地面接地部2と、この地面接地部2に連結された荷重負荷部3とを備えた荷重負荷機械(1)において、前記地面接地部2と荷重負荷部3の連結部(4,8)に複数の力学量検知センサ(11A〜11D)を設けると共に、これら力学量検知センサからの検出信号に基づいて機体バランスを演算して転倒の危険性を判断する演算装置15と、この演算装置からの指令により転倒回避指令を出力する転倒回避指令出力手段16を設けたのである。
このように構成することで、各力学量検知センサからの検出信号を比較するだけで作業中の機体バランスをリアルタイムで得ることができ、また、その結果を転倒回避指令出力手段16で出力するので、オペレータは荷重負荷機械の転倒回避を即行うことができる。
(もっと読む)
異常動作検知装置
【課題】
油圧ショベルの過負荷動作を油圧操作量から推定する異常動作検知装置を提供する。
【解決手段】
操作圧力検出手段から得られた各操作機構の操作量に応じて積算量算出手段によって操作量の積算量を算出し、変動量算出手段によって操作変動量を算出し、該積算量に基づいて各操作機構の関節角度を推定し、該推定関節角度及び該操作変動量に基づいて、異常動
作判定手段を用いて過負荷動作を判定する。
(もっと読む)
作業機械の制御装置
【課題】アタッチメントに識別情報を付与することなく、アタッチメント用流体圧回路の設定をアタッチメントに応じて確実に切換えできる作業機械の制御回路を提供する。
【解決手段】作業機械のキャブ内に、操作パネル51と、機械稼働状態などを画面表示するモニタ52を設置する。操作パネル51に、作業腕に設けたクイックカプラを脱着操作するスイッチ53を設ける。モニタ52は、通常の機械稼働状態を表示する表示画面から、クイックカプラ脱着操作用のスイッチ操作に連動してアタッチメントを選択指示する表示画面に切換わる。モニタ52にコントローラ61を接続し、コントローラ61にアタッチメント用油圧回路62を接続する。コントローラ61は、モニタ52により選択したアタッチメントに応じてアタッチメント用油圧回路62の設定を切換える。
(もっと読む)
1 - 20 / 31
[ Back to top ]