
Fターム[2F062FG07]の内容
機械的手段の使用による測定装置 (14,257) | 駆動、送り機構 (183) | 対象物 (129) | プローブ、測定子の (98)
Fターム[2F062FG07]に分類される特許
1 - 20 / 98
測定装置及び測定方法
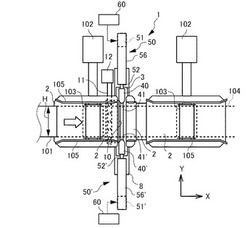
【課題】圧延板材の板幅を高い精度で測定できる測定装置の提供。
【解決手段】熱間圧延ラインに組み込まれて進行経路を進行してきた圧延板材101の板幅を測定するための測定装置1である。支持板の下方にあって進行経路と垂直に延びるように敷設された単一のスライドレール3に、進行経路を挟んだ両側に位置する一対の測定部材40が填合している。測定部材の両側にはこれを移動せしめる第1及び第2サーボモータ手段50が位置する。この各回転は制御出段によって制御される一方、回転トルクに対応する各電流値を検出する。ここで、制御手段60は、サーボモータ手段を駆動させて一対の測定部材を近接移動せしめ、圧延板材の一方の側端部に当接して変化する電流値に基づいて、対応するサーボモータ手段の回転を停止させ側端部のスライドレールに対する相対位置を決定する。2つのサーボモータ手段による相対位置から板幅を測定する。
(もっと読む)
関節式プローブヘッド

【課題】高速走査を精度と共に達成するため、測定システムの運動質量、動的誤差を最小にする関節式プローブヘッドを提供する。
【解決手段】CMMは、その直線駆動に関する回転誤差(例えばピッチ,ロールおよびヨー)のための誤差マップが作成される。走査ヘッドもまた、回転誤差のための誤差マップが作成される。測定データは、CMMおよび走査ヘッドの組み合わされた回転誤差に関して実時間に同期して誤差補正される。この同期補正ためCMMおよび走査ヘッドの誤差マッピングデータを使用する。
(もっと読む)
ワーク保持装置及び、このワーク保持装置を備えた3次元形状測定装置
【課題】精密なワークでも保持可能なワーク保持装置及びこのワーク保持装置を使用した3次元形状測定装置を提供する。
【解決手段】ワーク保持装置3は、ワークWを保持する回転ヤトイ31と、ベース部材32と、回転昇降機構33と、を有する。回転昇降機構33は、支持部34を上昇させ回転ヤトイ31の背面31Rと接触させ、この回転ヤトイ31をベース部材32から浮かせた状態で回転させる。また、支持部34を下降させ、回転ヤトイ31をベース部材32に着座させた状態でワークWの測定を行う。
(もっと読む)
接近が制限される空間を測定する方法及び装置
【課題】接近が制約を受けるような部品群の間の空間を測定する方法及び装置を提供する。
【解決手段】細長部材601と、フランジ603と、測定システムと、を備えることができる。細長部材の端部は602、第1構造604の穴630を通って移動して、第1構造604と第2構造605との間に位置する空間606に進入するように構成される。フランジ603は細長部材601から延出する。細長部材603は、フランジが第1構造604の穴630から出た後に突出することにより、フランジ603が穴630を通り抜けて戻ることができないように構成される。測定システムは、細長部材601の端部602の移動量を測定して、第1構造604と第2構造605との間の空間の長さを同定するように構成される。
(もっと読む)
スタイラスアーム
【課題】平面視で直線的な測定経路内に障害部分のある被測定物でも、障害部分に妨げられることなく測定を行えるようにする。
【解決手段】被測定物(B)の表面(H)に接触されるスタイラス(30、32)を有するスタイラスアーム(22)を備え、該スタイラスアームを平面視で1つの軸線に沿って駆動することにより、スタイラスが被測定物の表面の凹凸に従って上下動することに基づいて当該被測定物の表面の粗さや形状を測定する輪郭形状測定装置に用いられるスタイラスアーム。このスタイラスアームは、細長いアーム部(19)と、該アーム部の長さ方向で間隔をあけて設けられ、それぞれ、被測定物の表面に接触可能とされた接触端を有する第1及び第2のスタイラス(30、32)とを有する。
(もっと読む)
表面性状測定機
【課題】測定アームを交換しても、測定アームのバランスを自動的に調整し、使い勝手および作業効率の向上が期待できる表面性状測定機を提供する。
【解決手段】表面性状測定機において、測定アーム24は、ブラケット22に回転軸23を支点として円弧運動可能に支持された第1測定アーム24Aと、これの先端に着脱機構25を介して着脱可能に設けられ先端にスタイラス26A,26Bを有する第2測定アーム24Bとを含んで構成される。測定アームを円弧運動方向へ付勢しスタイラスに測定力を付与する測定力付与手段は、測定アームを回転軸を支点として円弧運動方向へ付勢するボイスコイル62を含んで構成される。第2測定アームの交換後に、ボイルコイルに通電する電流を調整して測定アームのバランスを調整するバランス調整手段が設けられる。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
座標測定装置
【課題】座標測定装置を用いて一連のワークピースを測定して検査するに際し、迅速かつ高速度に測定を実施しつつも、正確な測定結果を得ることを可能にする。
【解決手段】座標測定装置上で較正済み加工品を高速測定する工程(28)と、較正済み加工品と測定された加工品との間の差に対応する誤差マップを生成する工程(30)と、続くワークピースを同じ高速度で測定する工程(34)と、当該続くワークピースの測定値を誤差マップを用いて補正する工程(36)と、を実行するよう座標測定装置を構成する。加工品とは、ワークピースの一つであってもよい。
(もっと読む)
表面性状測定機
【課題】穴の内面測定時に、測定アームの姿勢を切り替えても、スタイラスや被測定物を損傷することが少ない表面性状測定機を提供する。
【解決手段】揺動可能な測定アーム24、この測定アームの先端に設けられた一対のスタイラス26A,26B、および、測定アームの揺動量を検出する検出部27を有するスタイラス変位検出器20と、被測定物を載置するステージと、検出器とステージとを相対移動させる相対移動機構とを備えた表面性状測定機において、測定アームが揺動方向の一方向に付勢される姿勢および他方向に付勢される姿勢に切り替える測定アーム姿勢切替機構60と、測定アーム姿勢切替機構によって測定アームの姿勢が切替動作された際に、測定アームの切替動作速度を予め設定された速度に制御する速度制御機構70とを備える。
(もっと読む)
偏位測定器
【課題】 架線の偏位を測定する従来技術に係る測定器では、支柱自身の重みにより撓みが生じるため、正確な偏位を測定することができなかった。
【解決手段】 本願発明は、基台上に設けられた支柱及び腕部を有し、レーザー放射部材、的板、および引き手を備え、的板に付された的印がレーザー放射部材に設けられたレーザー放射口の直上を示すことを特徴とする偏位測定器である。本願発明によれば、上端部分が撓んだ状態の支柱を、容易に基台に対して垂直に補正することを可能とし、正確な偏位測定作業を迅速に行なうことができる偏位測定器を提供する。
(もっと読む)
接触式プローブおよび形状測定装置
【課題】 プローブの伸び、及び周辺空気の温度、湿度の影響を抑えた高精度な形状測定を行うことのできる形状測定用の接触式プローブおよび形状測定装置を提供する。
【解決手段】 プローブシャフト2と先端球16を備えた接触式プローブ1において、
前記プローブシャフト2内の測長光路の少なくとも一部に透明体を設けることにより、少なくともこの部分だけ空気に暴露された光路を減らすことができる。その結果、外気の屈折率変化による測定誤差を抑え、精度を向上させることができる。
(もっと読む)
形状測定装置及び形状測定方法
【課題】 接触式プローブによって、垂直に近いような急傾斜面であっても、安定して接触力を制御し、高精度な形状計測を行う。
【解決手段】 接触式プローブを被測定物の表面に沿って移動させることで、被測定物の表面形状を測定する形状測定方法において、プローブに加わる接触力の分力の大きさにより、被測定面の傾斜を推定し、垂直に近い状態であると判断するとプローブ支持手段の移動方向に交差する方向にプローブ支持手段を移動させる。
(もっと読む)
形状測定装置
【課題】プローブの撓みの影響を受けずに高精度の形状測定を行う。
【解決手段】プローブ先端部3に一体に平面ダイクロイックミラー10及び球面ミラー16を設ける。オートコリメータ光学系5により平面ダイクロイックミラー10の傾斜量を測定し、並進移動量測定光学系12により球面ミラー16のX,Y軸方向のずれ量を測定する。ずれ量算出部42bは、測定した平面ダイクロイックミラー10の傾斜量及び球面ミラー16のずれ量に基づいて、プローブ先端部3において被測定物4の表面に接触する接触点となる球19の基準位置に対するX,Y軸方向のずれ量を算出する。推定部42cは、ずれ量算出部42bにより算出されたずれ量から、プローブ先端部3の球19のX,Y軸方向の位置を推定する。
(もっと読む)
基板厚み測定装置及び基板厚み測定方法
【課題】樹脂基板の厚みを再現性良く測定することが可能な基板厚み測定装置及び基板厚み測定方法を提供する。
【解決手段】樹脂基板1がテーブルに搭載されていない状態で、基準棒12の先端の平坦面12fをテーブル11に接触させると共に、接触センサ13の先端部13tをテーブル11に接触させて、接触センサ13とテーブル11との接触位置を基準値として保持し、樹脂基板1がテーブル11に搭載された状態で、基準棒12の先端の平坦面12fを樹脂基板1の上面に接触させると共に、接触センサ13の先端部13tをテーブル11に接触させて、接触センサ13とテーブル11との接触位置を測定値とし、基準値と測定値との差分から樹脂基板1の厚みを求める。
(もっと読む)
制御装置、および測定装置
【課題】制御性能を向上させる制御装置、および測定装置を提供する。
【解決手段】駆動制御回路3は、測定子を変位させる駆動機構25を駆動制御し、駆動機構25に流れる電流を検出する電流検出センサ27と、駆動機構25を駆動させる駆動速度に応じた目標電流を設定する速度制御部32と、目標電流および電流検出センサ27により検出された検出電流の電流偏差に、積分ゲインおよび比例ゲインをかけて駆動機構25に出力する出力電流を設定する電流制御部33と、を具備し、電流制御部33は、駆動機構25の駆動速度に応じて、積分ゲインおよび比例ゲインのうちの少なくともいずれか一方を切り替える。
(もっと読む)
ガイド機構および3次元測定機
【課題】基準面側の荷重が変化した場合にも、基準面側のエアベアリングとガイドとの間の隙間を適正な所定値に保つことができるガイド機構およびそのガイド機構を有する3次元測定機を提供する。
【解決手段】第1の側に基準面を有するガイドと、前記基準面に沿ってスライド可能に前記ガイドに設けられる被案内部材と、前記ガイドの前記基準面との間に第1の隙間を有するように前記基準面を押圧し、前記被案内部材に設けられる基準側案内部材と、前記基準面と反対側の前記ガイドの第2の側面との間に第2の隙間を有するように前記第2の側面を与圧し、前記被案内部材に設けられる与圧案内部材と、を有し、前記第1の隙間が所定値になるように、前記予圧との位置が前記被案内部材に対して上下動するように設けられる前記押圧との相対関係が調整可能であることを特徴とするガイド機構である。
(もっと読む)
穴検査装置
【課題】穴検査装置において、検査作業の作業性の向上を可能とする。
【解決手段】直交するX方向及びY方向に沿って検査ヘッド105を移動自在に支持し、この検査ヘッド105に対して測定ヘッド125,126をX方向及びY方向に直交するZ方向に沿って移動自在に支持し、この測定ヘッド125,126に複数の第1測定子127と複数の第2測定子128とを並んで並設し、Z方向に対して後退可能であると共に前進した位置に保持可能とする。
(もっと読む)
離隔距離確認器具
【課題】地上巡視に際して携帯するのに障害とならない程度にコンパクト化することができ、一旦設置した場合には数年間は利用することができるばかりでなく、樹木が密集する等の目視確認しにくい環境であっても容易に確認器具の所在を把握して、電線と他の樹木との間の離隔距離を確認する。
【解決手段】内外径が異なる中空、且つ絶縁性の棒状部材を入れ子式に伸縮自在とした竿2と、最大外径の棒状部材を樹木の幹に固定するための固定手段10と、最小外径の棒状部材の先端部に設けられた目印部材20と、最小外径の棒状部材の先部に一端を支持された絶縁紐30と、絶縁紐他端に固定されて空気よりも比重の小さい気体を封入したバルーン35と、を備え、各棒状部材は、竿の全長を任意の長さに固定できるように構成されている。
(もっと読む)
誤差分布算出方法、形状測定方法、および形状測定装置
【課題】複数の測定プローブを備えたフレーム部に起因する回転誤差を短時間且つ精度良く算出できる、誤差分布算出方法、形状測定方法、および形状測定装置を提供する。
【解決手段】被検物が載置される載置部と、被検物の形状を測定する複数の測定プローブの各々が所定のオフセットだけ離間して取り付けられた測定部と、測定部を互いに直交する2方向に前記載置部上を移動させる移動部と、を備えた形状測定装置における移動部による回転誤差分布を算出する誤差分布算出方法である。載置部上と所定の関係を持った位置に基準部材を配置する配置工程と、測定プローブの少なくとも2つが、基準部材の座標値をそれぞれ測定する測定工程と、各々の測定座標値の差分に基づいて移動部による回転誤差分布を算出する算出工程と、を備える。
(もっと読む)
三次元測定機の校正方法および校正治具
【課題】回転テーブル座標系の登録を効率よく行えるとともに高精度が確保できる三次元測定機の校正方法および校正治具を提供すること。
【解決手段】 回転テーブル50の座標系を登録するために、少なくとも3つの角度位置で回転テーブル50の表面の基準点の座標位置を測定する。測定には、接触部61として3つの同径の球体65を有し、支持部62として支柱64および基台63を有し、プローブ17の先端球17Aに対して3つの接点で同時に接触する校正治具60を用いる。測定手順として、回転テーブル50の表面に校正治具60を設置し、プローブ17を校正治具60に近接させ、プローブ17の先端球17Aが3つの球体65と同時に接触した状態での座標位置を読み取る。
(もっと読む)
1 - 20 / 98
[ Back to top ]