
Fターム[2F077AA29]の内容
感知要素の出力の伝達及び変換 (32,270) | 目的、特徴、課題 (5,635) | 変換範囲の拡大、絶対値の検出 (412) | 長周期信号の発生によるもの (15)
Fターム[2F077AA29]に分類される特許
1 - 15 / 15
アブソリュート変位量を算出する装置及びその方法
【課題】本発明は、移動体のアブソリュート変位量を検出することを課題とする。
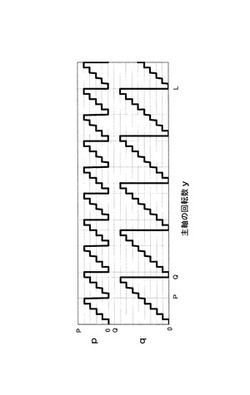
【解決手段】変位量を検出する実施例では、主軸の多回転アブソリュート回転角を主軸及び副軸に結合された角度センサによって検出された回転角度から算出する。回転駆動源11に結合された主軸12の回転は予め定める変速比で副軸13,14に伝達される。主軸12及び副軸13,14の回転角度Ss,Sp,Sqは、角度センサ15a,15b,15cによって検出され、それらはAD変換角度計算部16で角度検出値θs,θp,θqとしてそれぞれ同期化/整数化処理部17に送られ、整数化された周期信号p,qが算出される。周期信号p,qは、周期演算部18にそれぞれ送られ、主軸の周期信号rが算出される。主軸の多回転アブソリュート回転角θcは、回転角合成部19で主軸の周期信号r及び主軸の角度検出値θsに基づいて、算出される。本発明は、直線移動する移動体の変位量を検出する装置にも適用することができる。
(もっと読む)
回転角度検出装置

【課題】自動車のステアリングの回転角度検出等に用いられる回転角度検出装置に関し、検出する回転角度の誤差が少なく確実な角度検出が可能なものを提供することを目的とする。
【解決手段】磁石15A、15Bや磁石16A、16Bを第一及び第二の検出体12、13の回転中心C1、C2から所定間隔離れて対面配置すると共に、第一及び第二の検出体12、13の回転中心C1、C2上に磁気検出素子7、8を対向配置することによって、磁石15A、15Bや磁石16A、16Bの間に発生する直線状の磁力線の範囲が拡がるため、磁気検出素子7、8の位置ズレが多少生じても、検出信号の誤差が小さく、検出される回転角度の誤差を少なくすることができる。
(もっと読む)
回転角検出装置
【課題】部品点数が少ない簡単な構造で従動ギヤのがたつきを抑えることができる。
【解決手段】回転角検出装置10は、ハウジングを構成する金属板から成形されたカバー20及びケース40の他に、内部に合成樹脂製のホルダ30を備えている。また回転角検出装置10は、ステアリング軸等の検出対象物と一体に回転する合成樹脂製の主動ギヤ12と、主動ギヤ12に噛み合った状態でその回転に従って回転する2つの合成樹脂製の従動ギヤ14とを備える。従動ギヤ14はホルダ30とケース40との間に挟み込まれた状態で、それぞれの支持部38,42により回転自在に支持されている。
(もっと読む)
回転角検出装置及びその製造方法
【課題】主動ギヤと噛み合う従動ギヤの位相差を用いて絶対角度を検出する回転角検出装置において、実用に適した範囲内でより自由度の高い歯数の組み合わせを実現する。
【解決手段】回転角検出装置は、互いに歯数Z1,Z2の異なる第1及び第2主動ギヤ12b,12cと、これら主動ギヤ12b,12cとそれぞれ噛み合う第1及び第2従動ギヤ14,15を備えており、第1及び第2従動ギヤ14,15の歯数S1,S2が互いに異なっている。この構造では、それぞれの歯数Z1,Z2,S1,S2を一定の条件下で柔軟に設定することができる。このため、例えば第1及び第2主動ギヤ12b,12cの歯数差を新たに調整する必要が生じたとしても、それまでのサイズを極端に大型化することなく、各歯数を最適に設定することができる。
(もっと読む)
回転角検出装置
【課題】僅かな異常が発生しても、基本性能を維持できる回転角検出装置を提供する。
【解決手段】回転角検出装置は、互いに歯数Z1,Z2,Z3の異なる第1〜第3主動ギヤ12b,12c,12dと、互いに歯数S1,S2,S3の異なる第1〜第3従動ギヤ14,15,17を備えている。各従動ギヤ14,15,17の回転角α,β,γをそれぞれ検出し、その中から2つの角度信号を用いて絶対角度θを演算する。このとき、いずれかの回転角α,β,γの角度信号に関して異常が発生しても、その他の2つを用いて正確に絶対角度θを検出することができる。
(もっと読む)
光電式エンコーダ
【課題】1トラックから複数種類の情報を取得可能とした高精度な光電式エンコーダを提供する。
【解決手段】光電式エンコーダは、スケール12と、スケール12に測定光を照射する光源11と、スケール12で反射又は透過した前記測定光を受光する受光器14と、受光器14の受光信号を処理してスケール12の絶対位置を検出する信号処理回路20とを備える。スケール12は、複数の第1変調スケールパターン3A(k)を配列してなる第1変調インクリメンタルパターン31を有する変調インクリメンタルトラック301を備える。第1変調インクリメンタルパターン31は、測長方向に所定周期Pr内で第1変調スケールパターン3A(k)の形状が周期的に変化するように形成されている。
(もっと読む)
逐次読み取り式絶対位置センサ
本発明は、少なくとも一つの検出器(3)を備える逐次読み取りを行う絶対位置センサ(10)に関し、前記検出器(3)は、当該検出器に対して可動な部材(1)上に設けられたターゲットパターン(2)の遷移を検出することができる。本センサは、前記検出器(3)から生じる所定の数の連続データを記憶可能なシフトレジスタと、前記レジスタの値(5)を、各々がターゲットパターン(2)に対する検出器(3)の位置に対応する所定の値のセット(6)と比較する手段とを備えていることを特徴とする。  (もっと読む)
(もっと読む)
回転角検出装置
【課題】360度超の回転角を検出可能な回転角検出装置の温度変化や経年変化を簡素な構成により高精度に実現可能な回転角検出装置を提供すること。
【解決手段】360度を超える入力角度範囲で単調増加する第一の演算値θ1と、360度の入力角度範囲で複数回の複数周期波形の第二の演算値θ2とに基づいて第一の演算値θ1の理想値θ1rを算出し、この第一の演算値θ1の理想値θ1rと第一の演算値θ1とに基づいて理想値θ1rと演算値θ1との間のずれ量に関する関数値を算出し、前記ずれ量の関数値に基づいて第一の演算値θ1を補正して補正済み第一の演算値θ1’を求め、求めた補正済み第一の演算値θ1’と第二の演算値θ2とに基づいて出力角度θoを算出する。
(もっと読む)
絶対位置測定装置
【課題】小型であり製造が簡便である絶対位置測定装置を提供する。
【解決手段】本体200に螺合され回転によって軸方向進退自在のスピンドル300と、スピンドル300の回転に応じて2つの互いに周期が異なる位相信号を発信する位相信号発信手段400と、を備える。スピンドル300には、軸線に沿ってキー溝330が設けられている。位相信号発信手段400は、スピンドル300と一体回転する第1ロータ板520を備える第1ロータリーエンコーダ500と、スピンドル300と一体回転するとともに外側面にネジ531を有する第1回転円筒530と、第1回転円筒530のネジ531に噛み合う歯を有する歯車611およびこの歯車611と一体回転する第2ロータ板612を有する第2ロータリーエンコーダ600と、備える。スピンドル300の回転に対して第1ロータ板520の回転周期と第2ロータ板612の回転周期とは異なっている。
(もっと読む)
回転角度およびトルク検出装置の製造方法
【課題】取付時における位置ずれを防止して、誤検知の発生を抑制した回転角度およびトルク検出装置の製造方法を提供することを目的とする。
【解決手段】2つの金属リング体を第1、第2の回転体10、12に保持させる保持工程と、第1、第2の回転体10、12を着磁機11に装着して、金属リング体の周面方向に極性の異なる磁極を交互に配置した同一の着磁パターンを金属リング体に着磁して第1、第2のリング磁石部14、16を形成する磁石形成工程と、第1、第2の回転体10、12を互いに対向させて軸部8に連結する連結工程とを備え、第1、第2の回転体10、12および着磁機11に貫通孔を設け、各々の貫通孔13を対応させて位置決めピン15を挿入し位置決めする構成である。
(もっと読む)
回転角度およびトルク検出装置およびその製造方法
【課題】使用時に高温状態となっても検出精度を劣化させない回転角度およびトルク検出装置を提供することを目的としている。
【解決手段】トーションバー2の両端には入力軸4と出力軸6が連結された同一剛体である軸部8と、この軸部8の回転角度を検出する回転角度検出部と、軸部8のトルクを検出するトルク検出部とを備え、トルク検出部はトーションバー2を挟むように軸部8に連結した第1、第2の回転体10、12と、第1、第2の回転体10、12に保持させ、周面方向に極性の異なる磁極を交互に配置した第1、第2のリング磁石部14、16を有し、第1、第2のリング磁石部14、16の線膨張係数よりも小さく第1、第2の回転体10、12の線膨張係数よりも大きい線膨張係数を有する緩衝材15を介して、第1、第2のリング磁石部14、16を第1、第2の回転体10、12に保持させた構成である。
(もっと読む)
回転角度およびトルク検出装置
【課題】車種の違いに起因して軸部の直径や機構が異なっても、部品の取り替えが簡単で、容易に取り付け可能な回転角度およびトルク検出装置を提供することを目的としている。
【解決手段】トーションバー2を有する軸部8と、この軸部8の回転角度を検出する回転角度検出部と、軸部8のトルクを検出するトルク検出部とを備えており、トルク検出部および回転角度検出部は、各々、第1のトルク検出モジュール5、第2のトルク検出モジュール7、回転角度検出モジュール9として構成するとともに軸部8の周囲に配置した構成である。
(もっと読む)
絶対位置測定装置
【課題】小型であり、製造が簡便である絶対位置測定装置を提供する。
【解決手段】本体と、スピンドル300と、ロータリーエンコーダ500と、リニアエンコーダ600と、演算処理手段720と、を備える。ロータリーエンコーダ500は、スピンドル300と一体回転するロータ板520を備える。回転円筒530は、スピンドル300と一体回転するとともに雄ネジ531を有する。ナット部材610は、回り止めされた状態で回転円筒530の雄ネジ531に螺合している。リニアエンコーダ600は、ナット部材610とともにスライド移動するスライダ620およびスライダ位置を検出する検出スケール630を有する。ロータリーエンコーダ500はロータ板520の一回転以内の回転角をアブソリュート検出し、リニアエンコーダ600はスライダ620の位置をアブソリュート検出する。
(もっと読む)
位置検出装置
【課題】
簡易な構成で精度の高い位置検出を行なうことができる位置検出装置を提供すること。
【解決手段】
本発明の一態様にかかる位置検出装置は、強磁性体パターンを有するスケール10と、X方向に移動可能な位置検出ヘッド20とを有し、位置検出ヘッド20が、同極が向かい合うように配置された一対の磁石21、22と、磁石21、22間に複数のブリッジ型の磁気センサ41a、41bを有する第1の磁気センサ群と、第1の磁気センサ群と対向するよう配置された磁気センサ43a、43bを有する第2の磁気センサ群とを備え、第1の磁気センサ群と前記第2の磁気センサ群がずれており、磁気センサ41a、41bのピッチと、磁気センサ43a、43bのピッチとが、強磁性体パターンのパターン周期に基づくピッチとなっているものである。
(もっと読む)
回転角検出装置の回転角補正方法
【課題】自動車の車体制御システムなどに用いられる多回転のハンドル回転角検出装置において、機械誤差、電気誤差、磁気誤差をより少ない補正データで補正する高精度な回転角検出装置の回転角補正方法を提供する。
【解決手段】被検軸1を回転させるモータ9と、このモータ9の回転角を制御するモータコントローラ14と、このモータ9の回転角を検出するエンコーダ10とを用いて、モータ9により実際に回転させた被検軸1の回転角と第1および第2の回転角検出部3,7により求めた被検軸1の算出回転角との差を補正角として不揮発性メモリ11に記憶し、この補正角でもって被検軸1の算出回転角を補正するようにしたものである。
(もっと読む)
1 - 15 / 15
[ Back to top ]