
Fターム[3C007AS35]の内容
マニピュレータ、ロボット (46,145) | 用途 (2,903) | 医療用 (226)
Fターム[3C007AS35]に分類される特許
1 - 20 / 226
マスタ操作入力装置及びマスタスレーブマニピュレータ
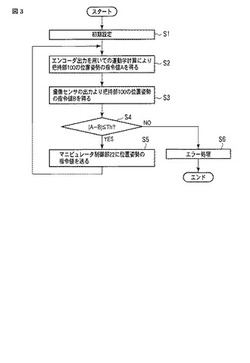
【課題】より故障に強い構成で操作部の位置・姿勢を検出することが可能なマスタ操作入力装置及びそのようなマスタ操作入力装置を備えるマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置の入力部に設けられた把持部の位置・姿勢の指令値を、把持部に取り付けられた関節の駆動量を検出するエンコーダの出力信号に基づいて算出するとともに、撮像センサで得られた画像に基づいて算出する。エンコーダの出力信号に従って算出された指令値と撮像センサで得られた画像に従って算出された指令値との間に所定以上の差がある場合にエラー処理を行う。
(もっと読む)
膝関節運動補助装置

【課題】膝関節運動補助装置を円滑に動作させる。
【解決手段】本発明の膝関節運動補助装置は、上腿部に装着される上腿装着部と、下腿部に装着される下腿装着部と、上記上腿装着部及び下腿装着部の膝関節側端部間を回転可能に連結する連結部と、この連結部を中心にして上記上腿装着部と下腿装着部とを相対的に回転運動させながら上記膝関節側端部間を前後方向に相対的にスライド運動させる駆動部とを備えた膝関節運動補助装置において、上記駆動部が、周縁カムと、この周縁カムの外周縁に配置される駆動歯車と、当該周縁カムの内周面に形成されるカム溝と、当該カム溝と係合するカムフォロアと、を有し、この周縁カムとカムフォロア及び駆動歯車とが上記上腿装着部及び下腿装着部の一方と他方に夫々取り付けられ、上記周縁カムの外周縁には、上記駆動歯車が係合する歯列が形成され、上記駆動歯車の回転により上記周縁カムと上記カムフォロアとが回転すると上記回転運動及びスライド運動が生じるようにした。
(もっと読む)
マスタスレーブマニピュレータ及び医療用マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータであっても逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】マスタ操作入力装置10の操作部11に、スレーブアーム31の冗長関節の駆動量を操作者が指令するための操作部材としての第1ロール関節102を設ける。スレーブアーム31が冗長関節を有していない場合には、スレーブアーム31の全体としての逆運動学を解くことによって各関節の駆動量を求める。また、スレーブアーム31が冗長関節を有している場合には、先端の冗長関節202がないものとして逆運動学を解くことによって冗長関節202以外の関節の駆動量を求める。冗長関節202についてはマスタ操作入力装置10からの指令値に対応した駆動量とする。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】歩行面の種類に応じた歩行支援を行う。
【解決手段】装着型ロボット1は、装着者が歩行のために関節モーメントを発生させる際に、各アシストアクチュエータを駆動して装着者が発生させる関節モーメントを軽減する。装着型ロボット1は、各関節の角度を計算することができ、これら関節の角度とつま先や踵の接地の有無から、装着者が歩行する歩行面の種類を判定する。装着型ロボット1は、判定した歩行面の種類に応じて各アシストアクチュエータの力を調節することにより、平地を歩行しているのと同程度の力加減で階段や坂道を上り下りできるようにする。このように、装着型ロボット1は、各歩行シーンを判定し、歩行シーンに応じたアシスト力を与えることで歩行シーンの違いで人が出力する力を意識することなく歩けるようにする。
(もっと読む)
術具及びその術具を有する手術支援システム
【課題】より正確に術具の寿命をコントロール可能な術具及びその術具を有する手術支援システムを提供すること。
【解決手段】術具先端部200の内部に、術具先端部200が位置決めアーム部100に装着されたときに通電されるタイマ201を設ける。このタイマ201は、位置決めアーム部100によって通電されたときに術具先端部200の使用時間又は動作回数をカウントする。タイマ201のカウントの結果、術具先端部200が寿命に達した場合にはロック機構201aが動作して術具の動作がロックされる。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
歩行支援装置、及び歩行支援プログラム
【課題】装着者に与える違和感を低減しつつ、装着性の優れた歩行支援装置を提供する。
【解決手段】装着型ロボット1は、装着性を向上させるために筋電センサは用いずに、装着者の運動を検知して動作を制御する。このように装着者の運動を検知して動作すると1次遅れの制御となり、装着者に違和感が生じる原因となるが、装着型ロボット1は、予め装着者の動きを先読みして1次遅れの制御を補完することにより、ユーザに与える違和感を緩和する。具体的な先読み場面としては、エスカレータや動く歩道など、歩行基準面が移動する場合に、装着者が移動する歩行面上で歩行を継続するか否かを推定して先読みし、その結果によって、歩行を継続する場合の制御と、歩行を継続しない場合の制御に切り換える。
(もっと読む)
装着型動作支援装置
【課題】腰部フレームと、腰部フレームの上部に接続されて装着者の肩に係留される背部フレームと、腰部フレームの下部に接続されて装着者の下肢に係留される下肢フレームとを備えた身体装着型動作支援装置であって、装着者の歩行時に装着者の骨盤の揺動に起因する背部フレームの揺れを抑制することを目的とする。
【解決手段】装着型動作支援装置10に、装着者の左右方向に長尺な基部31を有する腰部フレーム30と、腰部フレーム30の下部に接続される左右一対の下肢フレーム50,50と、腰部フレーム30の基部31の上部に接続される背部フレーム40と、背部フレーム40と腰部フレーム30の基部31とを接続する接続部70とを備える。接続部70は、前額面上の1自由度の回転機構であって、例えば、四節リンク機構で構成される。
(もっと読む)
ロボットシステム
【課題】自走式のロボットを適用して、被検者である人間に対して所定の処置を確実にかつ低コストで行うことができるロボットシステムを提供する。
【解決手段】移動可能なロボット100と、シート状に形成され、上面における被検者200の位置および姿勢を検出するシートセンサ10と、シートセンサ10に設けられ、シートセンサ10により検出された被検者200の位置および姿勢に関する情報、ならびに、シートセンサ10の位置および向きに関する情報を送信する第一,第二送信部23,32と、ロボット100に設けられ、第一,第二送信部23,32により送信される情報を受信する受信部111と、ロボット100に設けられ、受信部111により受信した情報に基づいて、ロボット100が被検者200に対する所定の処置を行うようにロボット100を制御するロボット制御部112を備える。
(もっと読む)
屈曲関節機構並びにその屈曲関節機構を有する術具及びその屈曲関節機構を有するマニピュレータ
【課題】本発明は、ワイヤの伸びやたるみ、機構部材の公差によるガタなどによる関節機構のガタを低減すると共に、連続した屈曲関節においても少ない部品点数で屈曲機構を構成することができ、多自由度術具などの処置具の先端部を精密位置決めすることができる屈曲関節機構並びにその屈曲関節機構を有する術具及びその屈曲関節機構を有するマニピュレータを提供することである。
【解決手段】駆動ロッド13を軸方向に直動させる場合には、駆動プレート7に駆動ロッド13からの押圧力が作用し、駆動ロッド13は弾性変形領域内で梁としてたわみながら、駆動プレート7を第1の回転中心O1位置を中心に回転させる。この場合、ダブルジョイント機構では、駆動プレート7が支持部5の回転中心O1を中心に回動し、この駆動プレート7の回動動作に連動して支持部5の先端部の第1ガイドギア部8に対して、作動部6の第2ガイドギア部9が転がり回転しながら動くようにしたものである。
(もっと読む)
義指
【課題】第一部材と第二部材とを大きな力で回動できるようにする。
【解決手段】末節骨に該当する第一部材2と中節骨に該当する第二部材3と基節骨に該当する第三部4材と中手骨に該当する第四部材5とをそれぞれ回動自在に軸支する。そして、第一部材2と第二部材3との第一連結点2a・3aを掌側に配置し、第二部材3と第三部材4との第二連結点3b・4aを手の甲側に配置する。そして、第一部材2と第三部材4とを接続する第一連結部材7と、第二部材3と第四部材5とを接続する第二連結部材8とを設け、第一部材2と第一連結部材7との第一連結部2b・7aを手の甲側に配置し、第二部材3と第二連結部材8との第二連結部3c・8aを掌側に配置した。
(もっと読む)
医療用マニピュレータ
【課題】マニピュレータを電気メスとして使用する場合であっても、先端動作部での通電経路を適切に確保して、その動作や手技を円滑に行うことができる医療用マニピュレータを提供する。
【解決手段】マニピュレータ10は、ワイヤ80bの進退駆動によって従動回転される歯車体126等により、少なくとも軸線方向を中心とするロール方向への回転動作が可能な先端動作部12を備える。先端動作部12は、高周波電源23から、第1通電経路E1及び第2通電経路E2を介してそれぞれ通電されることにより、その間で生体に通電可能な一対のグリッパ部材308、309を有する。先端動作部12における第1通電経路E1及び第2通電経路E2は、ロール方向へと先端支持部材161と共に回転可能なスリップリングR1、R2を含む第1構造部S1と、第1構造部S1より基端側に設けられて通電ピンP1、P2を有し、ロール方向には回転しない基端部材402を含む第2構造部S2とを備える。
(もっと読む)
マスタ・スレーブ方式マニピュレータの制御装置及びその制御方法
【課題】マスタマニピュレータの操作対象のスレーブマニピュレータを、切替操作により他のスレーブマニピュレータに切り替えた場合に、当該マスタマニピュレータの姿勢を、新たな操作対象のスレーブマニピュレータの姿勢に合わせる処理を効率的に行うマスタ・スレーブ方式マニピュレータの制御装置及び制御方法を提供すること。
【解決手段】マスタ・スレーブ方式マニピュレータの制御装置を次のように構成する。マスタマニピュレータに操作者3の手が位置しているか否かを検出する接触センサ311R,311Lと、接触センサ331R,331Lによって、マスタマニピュレータに操作者3の手が位置していないことが検出された場合に、マスタマニピュレータの姿勢を、スレーブマニピュレータの姿勢に合わせるように、マスタマニピュレータを移動させる制御を行うマスタ制御回路300と、を具備させる。
(もっと読む)
医療用マニピュレータ
【課題】先端動作部の軌跡精度や位置決め精度を効果的に向上できる医療用マニピュレータを提供することを目的とする。
【解決手段】医療用マニピュレータ10における先端動作部12は、エンドエフェクタ19と、ヨー軸Oyを中心に動作可能な主軸部材100と、ロール軸Orを中心に動作可能なギア体102とを有する。ヨー軸操作指令を受けた場合、ヨー軸駆動系のガタ分を補償するように、主軸部材100の駆動源である第1モータ50aの補償制御がなされる。ロール軸操作指令を受けた場合、ヨー軸駆動系のガタおよび弾性変形に起因するヨー動作の発生を防止または抑制するように第1モータ50aの補償制御がなされる。
(もっと読む)
操作機構
【課題】 可動部の可動範囲が広く、可動部をスムーズな動きで精度良く操作することができる操作機構を提供する。
【解決手段】 操作機構1は、3組以上のリンク機構11Aを介して、固定部材4に対し入力部材15Aを姿勢変更可能に連結した入力側リンク作動装置2Aと、3組以上のリンク機構11Bを介して、固定部材4に対し出力部材15Bを姿勢変更可能に連結した出力側リンク作動装置2Bとを備える。リンク機構11A,11Bは、固定側の端部リンク部材1aと、入力側または出力側の端部リンク部材1cと、これら両端部リンク部材1a,1cを連結した中央リンク部材1bとでなる。入力側リンク機構11Aの固定側の端部リンク部材11aの回転を出力側リンク機構11Bの固定側リンク部材11aに伝達する回転伝達機構5を2組以上設ける。
(もっと読む)
医療用マニピュレータ
【課題】駆動源から先端動作部に駆動力を伝達する動力伝達経路上に設けられた可撓性を有する動力伝達部材の異常の有無を判断できる医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10において、モータ50a、50bの駆動力はワイヤ80a、80bを介して先端動作部12に伝達される。モータ50a、50bは、コントローラにより駆動制御される。コントローラ29は、始業前点検として、規定信号に従ってモータ50a、50bを動作させ、エンコーダ51a、51bからの信号に基づいてモータ50a、50bの動作角度を監視し、モータ50a、50bが目標角度に達するのに要する動作時間に基づいて、ワイヤ80a、80bの異常の有無を判断する。
(もっと読む)
装着型動作支援装置
【課題】動作時に身体の装着部に対するずれ動きを最小限に抑えるようにする。
【解決手段】装着型動作支援装置SUは、肘関節A3を挟む上腕部A1に装着される第1サポート部材10と、前腕部A2に装着されると共に第1サポート部材10に連結され、肘関節A3の屈曲動作に合わせて姿勢変位可能な第2サポート部材12とを備える。第2サポート部材12は、前腕部A2に装着される前腕装着部45を備え、この前腕装着部45は、前腕部A2の最も細い部位である関節骨格部位A7に保持される保持部51を備える。また前腕装着部45は、肘関節A3から手首関節A4に近づくにつれて捻れた形状に形成され、前腕部A2を包み込むように装着される。前腕装着部45の前腕部A2に臨む内側面にノンスリップ加工が施されており、前腕部A2に対して前腕装着部45が滑り難くなっている。
(もっと読む)
マニピュレータシステムの制御装置、マニピュレータシステム、及びマニピュレータシステムの制御方法
【課題】マニピュレータシステム利用上の手間を省き、使い勝手を向上させるマニピュレータシステムの制御装置、該制御装置を具備するマニピュレータシステム、及びマニピュレータシステムの制御方法を提供すること。
【解決手段】マニピュレータシステムに、次のようなスレーブ制御回路400を具備させる。スレーブ制御回路400は、当該マニピュレータシステムの終了時に、その終了態様を示す終了識別情報を生成し、該終了識別情報を記憶し、当該マニピュレータシステムの起動時に、前記終了識別情報を読み出す。
(もっと読む)
マスタスレーブマニピュレータ
【課題】冗長関節を有するマスタスレーブマニピュレータにおいて、遠隔操作装置とスレーブアームとの構造が異なる構造であっても、逆運動学計算にかかる負荷を低減可能なマスタスレーブマニピュレータを提供すること。
【解決手段】遠隔操作装置100からの操作信号を受けて、マスタ制御部201は、操作部101の姿勢変化に係る等価回転ベクトルVr(t)と直前の操作部101のマスタロール軸Xm(t)とを算出する(ステップS1)。Vr(t)とXm(t)のなす角φが規定値以下の場合には、冗長関節1(Roll2)と、関節1と冗長関係にある関節4(Roll1)のうち、Roll2を駆動関節とし、Roll1を固定関節として(ステップS3)、逆運動学計算を行う。角度φが規定値を以下でない場合には、Roll1を駆動関節とし、Roll2を固定関節として(ステップS4)、逆運動学計算を行う。
(もっと読む)
手術用動力伝達アダプタ及び医療用マニピュレータシステム
【課題】清潔域と不潔域との交錯を防止可能な手術用動力伝達アダプタ、及びそれを備える医療用マニピュレータシステムを提供すること。
【解決手段】術具240とアーム200との間に介在される手術用動力伝達アダプタ220であって、滅菌処理が施される清潔域に接触する第1の部位と滅菌処理が施されない不潔域に接触する第2の部位とを有するロッド222a、222bを備え、ロッド222a、222bが直動運動しても第1の部位が清潔域に位置し、かつ、第2の部位が不潔域に位置するように、ロッド222a、222bの直動運動の範囲が設定されている。
(もっと読む)
1 - 20 / 226
[ Back to top ]