
Fターム[3C269AB13]の内容
数値制御 (19,287) | 作業内容、対象機器、対象製品 (2,914) | 塗装 (34)
Fターム[3C269AB13]に分類される特許
1 - 20 / 34
プログラム生成装置及びその方法
【課題】プログラミング生成装置におけるロボット自動生成処理において、編集作業が容易となるようジョイント(Joint)動作を直線に分割する。
【解決手段】ロボットの動作を制御するための動作プログラムを軌跡情報に基づき生成するプログラム生成装置1である。そして、前記軌跡情報は複数の動作点を有し、前記複数の動作点の中から適数の動作点を選択する選択手段と、前記選択された動作点を直線でつなげて直線動作に係る変更後の軌跡情報を生成する軌跡情報変更手段とを備える。
(もっと読む)
ロボットとその制御方法

【課題】ロボットが複数の動作を実行する場合に、そのうちの特定の動作に制限されずに、各動作における条件の変化を考慮して、各動作において正常動作中に誤作動することなく過負荷を確実に検出し安全に停止させることができるロボットとその制御方法を提供する。
【解決手段】複数の動作を実行するロボット10の制御方法であって、エンドエフェクタ12に作用する外力を検出する力センサ14と、3次元空間内でエンドエフェクタの位置と姿勢を移動可能なロボットアーム16と、ロボットアームを制御するロボット制御装置20とを備え、(A)外力の閾値をロボットの動作毎に記憶し、(B)ロボットアームを制御して各動作を順次実行し、(C)各動作の実行中に力センサで検出された外力が、前記閾値を超えた場合に、ロボットアームを停止する。
(もっと読む)
データ生成装置、データ生成方法、及びプログラム
【課題】多数の被描画媒体に対して、被描画媒体のそれぞれに画像を描画するための画像データを生成する際に扱う多数のパラメーターを扱い易くすることができるデータ生成装置、データ生成方法、及びプログラムを提供する。
【解決手段】データ生成装置は、複数の被描画媒体を備える被描画体に描画することで、複数の被描画媒体のそれぞれの被描画媒体に媒体画像を描画するための描画画像の画像データを生成するデータ生成装置であって、画像データを規定するパラメーターの値を入力するための入力ボックスを有する入力画面部と、入力されたパラメーターの値を二次元形状として表示する補助表示画面部と、を備え、補助表示画面部は、被描画媒体の形状及び配置位置を示す二次元形状における、パラメーターが対応する部分を示すパラメーター位置表示画面部を有する。
(もっと読む)
データ生成装置、データ生成方法、及びプログラム
【課題】多数の被描画媒体に対して、被描画媒体のそれぞれに画像を描画するための画像データを生成する際に扱う多数のパラメーターを扱い易くすることができるデータ生成装置、データ生成方法、及びプログラムを提供する。
【解決手段】データ生成装置は、複数の被描画媒体を備える被描画体に描画することで、複数の被描画媒体のそれぞれの被描画媒体に媒体画像を描画するための描画画像の画像データを生成するデータ生成装置であって、被描画媒体の形状を規定するパラメーターの値と、被描画体における被描画媒体の位置を規定するパラメーターの値と、を取得し、取得したパラメーターの値によって、描画画像における媒体画像の位置を規定する。
(もっと読む)
ロボットの関節の原点補正方法およびそのシステム
【課題】高精度且つ安価にロボットの関節を原点補正する。
【解決手段】第1の姿勢P1(l)のロボット12のマーカー22が撮影画像に写る位置にカメラ16を設置する。各関節用のエンコーダの出力値に基づいて、原点補正対象の関節12lに予め対応付けされた関節のみを動かすことにより、カメラ16の撮影画像上において第1の姿勢時のマーカー22の位置の近傍にマーカー22が写るような第2の姿勢P2(l)に変更する。ロボット12の姿勢変更によるカメラ16の撮影画像上におけるマーカー22の変位に基づいて、原点補正対象の関節12lの原点補正を行う。
(もっと読む)
多関節型ロボットの制御装置,制御方法及び制御プログラム
【課題】多関節型ロボットの作業部の位置及び移動速度を維持しつつ,第1関節駆動系の駆動軸各々の角度を確実に作業終了点の角度に到達させること。
【解決手段】例外条件が充足していない場合はステップS5で算出される補間点に基づいて第1及び第2関節駆動系の駆動軸各々を駆動する(S64)。例外条件が充足した後(S61のYes側),作業部が作業終了点に到達するまでの間は(S12のNo側),第1関節駆動系の駆動軸各々を作業終了点の角度を目標として線形に変化させるための該第1関節駆動系の駆動軸各々の角度を算出すると共に(S8),該算出された第1関節駆動系の駆動軸各々の角度とステップS5で算出された補間点における作業部の位置とに基づいて第2関節駆動系の駆動軸各々の角度を算出し(S9),該算出結果に従って第1及び第2関節駆動系の駆動軸各々を駆動させる(S11)。
(もっと読む)
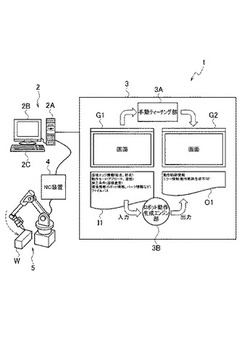
動作プログラムの自動生成プログラムおよび装置
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ
【課題】ポジショナ回転軸のロボットに対する相対的な位置姿勢を高精度に計測する。
【解決手段】
ロボット10に作業されるワークWを把持するポジショナ12の回転軸Arまたは直動軸の該ロボット10に対する相対的な位置姿勢を計測するロボット10の外部軸の計測方法であって、ポジショナ12の回転軸Arまたは直動軸に対する所定の位置に定義された計測点Pmにロボット10の基準点Ptが手動によって位置合わせされた状態の該ロボット10の姿勢を、基準点Ptが計測点Pmに位置合わせされた状態を維持しつつ計測姿勢に変更する。計測姿勢として、(1)関節10a〜10fそれぞれにおける、ポジショナ12が把持するワークWに対して作業を実行するときの作業姿勢時の関節値と計測姿勢時の関節値との間の差分値と、(2)関節10a〜10fそれぞれに対して予め定義されている重み値とに基づいて、作業姿勢に対する類似の程度が高い姿勢を決定する。
(もっと読む)
ロボットの制御装置及びロボットの姿勢補間方法
【課題】ロボットの手先がワークを把持して加工を行う場合の作業精度を向上させる。
【解決手段】制御装置は、手先の先端点を座標原点とするX方向,Y方向,Z方向の各軸について、手先の位置及び姿勢をティーチングする場合に、座標原点から各軸方向の所定距離に手先の姿勢を定める姿勢点を設定すると、ティーチングした姿勢に対応する姿勢点の間について、各軸の姿勢点の移動軌跡がそれぞれ滑らかに繋がるように補間する。
(もっと読む)
ロボット教示データの算出方法およびロボットのコントローラ
【課題】第1のロボットの動作を第2のロボットに実行させる。
【解決手段】第1のロボットRAの動作を第2のロボットRBが実行できるように、第1のロボットRAに対する第1の教示データθAから第2のロボットRBに対する第2の教示データθBを算出するロボット教示データの算出方法であって、第1の教示データθAに対する第1のロボットRAの基準点SAの位置PAを、第1の教示データθAと第1のロボットRAの構成内容を示す第1のロボット構成データとに基づいて算出し、前記算出した位置PAに第2のロボットRBの基準点SBが位置するための第2の教示データθBを、前記算出した位置PAと第2のロボットの構成内容を示す第2のロボット構成データとに基づいて算出する。
(もっと読む)
指接触により動作教示可能となる動作教示装置
【課題】 使用者に負担をかけることなく効率的に教示作業を行うことができる動作教示装置の提供
【解決手段】 静電容量スイッチ111は、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然に位置する場所に配置されている。よって、使用者は把持部110を把持するだけで、ティーチング装置100を動作教示可能状態とすることができる。つまり、ティーチング装置100を動作教示可能状態とするにあたり使用者に特別な操作を要求しないので、動作教示にあたり使用者の操作負担を軽減することができる。圧力スイッチ113は、静電容量スイッチ111の近傍、把持部110を掌及び第三指〜第五指によって把持した際に、第三指又は第四指が自然と位置する場所に配置される。これにより、使用者は、通常のイネーブルスイッチと同様に、把持部110を強く握る動作をするだけで、動作入力不可能状態とすることができる。
(もっと読む)
曲面塗装装置
【課題】曲率が一定でない曲面の塗装面に対しても均一な厚みの塗膜が得られる曲面塗装装置を提供する。
【解決手段】曲面塗装装置100は、高速で塗料の吐出と吐出停止が切り替え可能で、且つ塗料の吐出時間と吐出停止時間の制御可能なノズル2と、ノズル2が取り付けられ、該ノズル2の塗料吐出口を被塗物1の塗装面に対向するように該ノズルの移動可能なロボットアーム4と、ロボットアーム4を制御するロボットコントローラ5と、ノズル2の塗料吐出時間と吐出停止時間の制御可能なノズル駆動回路7と、ロボットコントローラ5及びノズル駆動回路7を制御する主制御装置6とを備え、主制御装置6は、被塗物1の表面を仮想の三次元マトリクス面によって多数の微小塗面12に分解し、各微小塗面に対してノズル2の塗料吐出口が対向するようにロボットコントローラ5を制御すると共に、ノズル2が対向する微小塗面12の面積に応じた塗料の量を吐出するようにノズル駆動回路7を制御する。これにより、曲面の塗装面に対する塗膜の厚みを均一にする。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
ツールパラメータ導出装置,ロボット
【課題】ロボットの多関節マニピュレータのアーム先端のフランジ面の回転中心に取り付けられたツールの並進成分の寸法を自動的に導出することのできるツールパラメータ導出制御装置及びこれを備えたロボットを提供すること。
【解決手段】3箇所以上の位置でツール11と平板治具50との接触がツール接触検出部40で検出されるまでのベース座標系BのZb軸方向の移動量を取得し,該移動量に基づいて平板治具50のベース座標系Bに対する傾きを算出する。そして,その傾きに基づいて平板治具50と平行及び垂直な作業座標系Wを設定し,作業座標系Wにおいてフランジ面12の回転中心Pを複数の位置姿勢に位置決めした状態でツール11と平板治具50との接触がツール接触検出部40で検出されるまでの作業座標系WのZ軸方向の移動量を取得し,該移動量に基づいてツール11の並進成分の寸法を導出する。
(もっと読む)
マニピュレータのキャリブレーション方法及びロボット制御システム
【課題】
マニピュレータのキャリブレーションをどこでも簡単に行うことができ、治具の準備などの作業工数を大幅に削減でき、特別な治具が準備できない環境でも即座にキャリブレーションを行うことが可能であり、マニピュレータに求められる本来の作業を行うための不必要な待ち時間や工数を削減する。
【解決手段】
複数の観測位置姿勢毎にレーザ変位センサLSにより治具Gの直線部上の点をそれぞれ検出する。検出した値から直線部上の検出点のロボット座標系の座標を、観測位置姿勢毎にそれぞれ求める。検出点の2つを一組として複数の組からロボット座標系を基準とした直線部の単位方向ベクトルを複数算出する。算出した直線部の単位方向ベクトルと、ロボット座標系のベクトル変数で表される直線部の単位方向ベクトルから連立方程式を作り、最小二乗法によりマニピュレータのキャリブレーションを行う。
(もっと読む)
ロボット装置用の制御プログラムを試験するための試験装置
本発明は、実際のロボット装置用の、具体的には、複数のロボット制御部(2.1〜2.n)を有する塗装装置用の制御プログラムを試験する試験装置に関連する。それらはそれぞれ制御プログラムを含み、実際のロボット装置におけるロボット制御部(2.1〜2.n)と、制御ユニット(4)が制御プログラムを含み、実際のロボット装置における制御ユニット(4)に相当するロボット制御部(2.1〜2.n)を調節するための少なくとも1つの制御ユニット(4)とに相当し、ロボット制御部(2.1〜2.n)をお互いに接続する、および/または、制御ユニット(4)に接続する第一のデータバス(3)も有し、第一のデータバス(3)は実際のロボット装置におけるデータバスに相当する。試験装置が、第一のデータバス(3)に接続され、かつ、実際のロボット装置の周辺機器部品をシミュレーションするモデリングデバイス(9)をも有し、そのため制御プログラムは周辺機器部品なしで試験され得る。本発明はまた、好適な試験方法をも含む。 (もっと読む)
自動作業システムにおけるロボットの診断方法及び診断プログラム
【課題】 位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレ量を検出してこのズレ量に基づいて位置決めロボット又は作業ロボットに異常が生じたか否かを診断する。
【解決手段】位置決めロボット100が保持ツール105により保持したワークを作業ツール205の目標位置に搬送して位置決めするとともに、作業ロボット200がワークに対し所定の作業を行う際、ロボット制御装置300が、第1のロボットアーム110の先端部位又はワークに設けられた慣性センサ106において検出される慣性力に基づいて保持ツール105の位置ズレ量を検出し、検出した位置ズレ量ΔP1を用いて位置決めロボット100に異常が発生したか否かを検出する。
(もっと読む)
スプレーロボットにおけるスプレー移動経路生成方法及びスプレー移動経路生成装置
【課題】スプレー塗布する位置等を基本条件として予め決定し、スプレー塗布の順序をこの基本条件に従って決定することで、入力する人によってスプレー塗布の動作経路にバラツキを発生することがなく、品質とサイクルタイムとにバラツキが発生することもない、最適なスプレー塗布の順序を決定するスプレー移動経路生成方法及びスプレー移動経路生成装置を提供する。
【解決手段】
任意のスプレー位置を選択するST15と、移動パターンを選択するST16と、移動パターンにおいて、送りピッチを設定するST19と、移動パターンの始端に対応するスプレー位置を最初のスプレー位置として選択するST20と、スプレー順序を決定するST21と、を実行することにある。
(もっと読む)
塗装ロボットの教示方法および塗装方法
【課題】 塗装ロボットの動作エラーの発生を抑制することができる塗装ロボットの教示方法、および塗装ロボットの動作エラーの発生を抑制することにより、被塗物を効率よく塗装することができる塗装方法を提供すること。
【解決手段】 自動車ボデー2の三次元データを読み込み、自動車ボデー2の塗装範囲を画成するための基準となる複数の塗装ポイントと、複数の塗装ポイントのそれぞれに対応するコンベヤ値Cvとからなる仮教示点をシミュレーションにより設定し、複数の仮教示点を、コンベヤ値Cvの特定範囲ごとに複数の塗装範囲群に区分する。そして、各前記塗装範囲群におけるコンベヤ値Cvの特定範囲の中間値を算出し、各中間値を、塗装範囲群における塗装ロボット4の動作開始点となるように設定することによって、塗装ロボット4に教示する。そして、その塗装ロボット4を用いて塗装する。
(もっと読む)
自動作業システムにおける位置ズレ補正方法及び位置ズレ補正プログラム
【課題】位置決めロボットと作業ロボットとの協調作業の際に生じ得る位置ズレを検出して補正する。
【解決手段】アームの先端部位に保持ツール105及び慣性センサ106を具備する位置決めロボット100と、アームの先端部位に作業ツール205を具備する作業ロボット200と、ロボット制御装置300と、を有した自動作業システムにおいて、位置決めロボット100によりワークを保持した保持ツール105をワークの作業位置に応じた保持ツール105の位置決め基準位置P0に搬送して位置決めするとともに、作業ロボット200により当該ワークに対し所定の作業を行う際、ロボット制御装置300は、慣性センサ106の慣性力に基づいて保持ツール105の位置決め基準位置P0からの位置ズレ量ΔP1を検出し、検出した位置ズレ量ΔP1に基づいて保持ツール105の位置決め基準位置を位置ズレ前の位置P0に補正する。
(もっと読む)
1 - 20 / 34
[ Back to top ]