
Fターム[3C269QE02]の内容
数値制御 (19,287) | 表示内容、監視、記録内容 (1,309) | 図形を用いて表示するもの (564) | 作業空間全体を表示 (63)
Fターム[3C269QE02]に分類される特許
1 - 20 / 63
数値制御装置
【課題】特定の加工工程の加工部位の再加工を容易におこなうことができるとともに、容易に処理を実装することができる数値制御装置を提供する。
【解決手段】NCプログラム23aは、工程が実行順に記述されるとともに、工程はシーケンシャルファンクションチャート310のステップに対応し、加工機械50を各工程が実行される直前の工程別加工準備完了状態に至らせるための工程別加工準備指令が各工程の前段に記述され、NCプログラム実行手段25aは、実行開始ステップ設定手段116bで設定された実行開始ステップに対応する実行開始工程の前段に記述された工程別加工準備指令までスキップし、実行開始工程に対応する工程別加工準備指令を実行することにより、加工機械50を実行開始工程が実行される直前の工程別加工準備完了状態に至らせた後に、実行開始ステップに対応する実行開始工程からNCプログラム23aを実行する。
(もっと読む)
ロボットプログラミング装置

【課題】オフラインロボットプログラミング装置で作業者の修正作業を排除する。
【解決手段】ロボットプログラミング装置(10)は、ワーク(14)の三次元モデル上で加工線(41)を指定する加工線指定部(21)と、加工線に基づいて生成される教示点の動作形式等を指定する動作形式指定部(22)と、加工線および動作形式等に基づいてロボット(12)のプログラムを生成するプログラム生成部(23)と、ワークに直接接触するツールの一部分以外のツール非加工部位を干渉対象として指定する干渉対象指定部(24)と、教示点におけるロボット等とワーク等との干渉を検出する干渉検出部(25)と、干渉時にロボットの位置からツール先端点を並進移動することにより、ロボット等とワーク等とが干渉しない非干渉位置を検索する非干渉位置検索部(26)と、検索結果に基づいて教示点の位置を修正する修正部(27)とを含む。
(もっと読む)
工具管理システム
【課題】工具の情報の入力作業が簡単で、誤入力、入力漏れのおそれが小さく、入力後の情報の確認作業が簡単な工具管理システムを提供することを課題とする。
【解決手段】工具管理システム2は、単一の画面23、24中に単一の工具T1〜T7の像230a、240aと、工具T1〜T7の所定の部位に関する情報項目230b、240bと、を表示する画面21を有する表示装置20を備える。作業者は、工具T1〜T7の像230a、240aおよび情報項目230b、240bを見ながら、情報を入力することができる。このため、工具T1〜T7の情報の入力作業が簡単である。また、誤入力、入力漏れのおそれが小さい。また、入力後の情報の確認作業が簡単である。
(もっと読む)
工作機械の工具軌跡表示装置
【課題】3次元形状を直感的に認識可能な工作機械の軌跡表示装置を提供する。
【解決手段】数値制御装置20は、指令位置演算部21により求められた指令位置に基づいて、各軸モータを制御する駆動軸制御部22とを備え、位置検出装置によって検出された各軸の実位置情報がフィードバックされる。軌跡表示装置30は、駆動軸制御部22から離散的な時刻における実位置データを同時に時系列データとして取得する実位置データ取得部32、可動部3次元軌跡計算部34、可動部3次元軌跡計算部34で求めた可動部の3次元軌跡から、立体視用左眼画像データを計算する左眼用画像計算部36,立体視用左眼画像データを計算する右眼用画像計算部38、左眼用画像計算部36からの立体視用左眼画像データ,右眼用画像計算部38からの立体視用左眼画像データを用いて、画像を対応する左右のそれぞれの眼から見えるように表示する立体視用画像表示部43を備える。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置
【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
ロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラム
【課題】シミュレーションを行うハードウェア資源によってシミュレーションの結果が互いに異なることを抑えてハードウェア資源間でのシミュレーションの結果の差異を少なくすることの可能なロボットシミュレーション装置、ロボットシミュレーション方法、及びロボットシミュレーションプログラムを提供する。
【解決手段】仮想ロボットを軌道に沿って動かすロボットシミュレーション装置であって、前記仮想ロボットの軌道をサンプリング時間Tpだけサンプリングするプロセスである軌道計算プロセスP1を割り込み間隔Tiで行う軌道計算部と、前記サンプリング時間Tpが前記割り込み間隔Ti以下となる範囲で前記サンプリング時間Tpと前記割り込み間隔Tiとの双方を各別に可変にする時間可変部とを備える。
(もっと読む)
数値制御装置
【課題】測定対象物の計測作業をより簡易にでき得る数値制御装置を提供する。
【解決手段】3Dモデルを用いて干渉を検知する機能を有する数値制御装置は、その3Dモデルの位置情報が正確か否かの情報が属性情報として付与された構造体および移動体の3Dモデルに基づいて、これら3Dモデルの位置を演算する数値制御装置のシミュレーション部4'と、数値制御指令に基づいて、機械およびシミュレーション部を駆動するNC
装置部2'と、を備える。NC装置部2'は、前記3Dモデルの重なりが検知された場合に、当該重なりが生じた3Dモデルの位置情報が正確か否かを判断し、位置情報が正確と判断した場合は前記数値制御指令の実行中止を機械3およびシミュレーション部4'に指示し、前記位置情報が正確でないと判断した場合は警告を出力しつつ前記数値制御指令の実行続行を機械3およびシミュレーション部4'に指示する。
(もっと読む)
経路生成装置および経路生成方法
【課題】C空間における過剰な計算を排除して、動作経路計画工数を低減する。
【解決手段】初期位置記憶手段と、目標位置記憶手段と、現在位置検出手段と、経路記憶手段と、現在位置隣接コンフィギュレーション点を求める第1候補判断手段と、現在位置隣接コンフィギュレーション点のうち障害物との干渉点に隣接する干渉点隣接コンフィギュレーション点を求める第2候補判断手段と、現在位置隣接コンフィギュレーション点が干渉点であるかどうかを判断する干渉チェック手段と、現在位置隣接コンフィギュレーション点のうち現在位置から目標コンフィギュレーション点に近づくようにコンフィギュレーション点を選定する距離候補判断手段と、を備え、現在位置において前記距離候補判断手段により選定された距離候補コンフィギュレーション点が干渉点でない場合には、直進モード経路を生成し、干渉点である場合には境界追従モード経路を生成する。
(もっと読む)
数値制御マシンツールのための予測制御及び仮想表示システム
本システムは、ルール(T)用ツールホルダ(2)、ツール(T)による工作対象ワークピース(W)用キャリア(3)、及び、前記ツール(T)と前記ワークピース(W)との間に制御された各軸方向の相対変位をもたらすべく関連ドライバ(D1、…、DN)によって制御可能な複数のアクチュエータデバイス(A1、…、AN)を含むマシンツール(M)のための制御及び仮想表示(1)を行う。制御システム(1)は駆動手段(D1、…、DN)に接続されて、製造される前記ワークピース(W)の特徴及びツール(T)の特徴に応じた所定の工作プログラムを実装するのに適した数値制御器(NC)であって、工作プログラムに基づいて、軸方向のツール(T)の位置であって関連するアクチュエータデバイス(A1、…、AN)の作動によって達成される位置を画定する目標座標を計算するのに適した数値制御器(NC)と、画像表示手段(ID)と、計算された目標座標の値を受け取るべく数値制御器(NC)と協働し及び/又はこれに接続された処理システム(P)とを含み、当該システムは、マシン(M)の、ワークピース(W)の、及びツール(T)の目標座標に基づいて及び格納された数学モデルに基づいて、工作が進行中に、予め設定された「予測時間窓」においてワークピース(W)に及びマシン(M)に予め選択された未来の瞬間まで採用される位置の仮想2次元表現を画像表示手段(ID)上に作るのに適した画像データを生成するべく構成される。  (もっと読む)
(もっと読む)
ロボット教示システム
【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
プログラム作成装置及びプログラム作成方法
【課題】作業ブロックの設定作業において作業者の負担を軽減する技術を提供する。
【解決手段】プログラム作成装置は、作業ブロック定義部41と、工程フロー編集部42と、制御プログラム生成部43とを備える。工程フロー編集部42は、複数の作業ブロック情報を所望の順序で並べて得られる工程フローにおいて、処理対象作業ブロック情報よりも後続の設定対象ブロック情報の内部状態情報を、当該処理対象ブロック情報の事後条件を用いて設定する。制御プログラム生成部43は、工程フロー編集部43により内部状態情報が設定された複数の作業ブロック情報に基づいて制御プログラムを生成する。
(もっと読む)
表示装置、表示制御方法、プログラム、およびコンピュータ読み取り可能な記録媒体
【課題】制御プログラムが単純順次実行型であるか状況適応型であるかを問わず、プログラム制御される制御対象装置の特定部位の軌跡を表示可能な表示装置を提供する。
【解決手段】PC10は、制御プログラムの実行結果である一連の位置の指令値を取得する指令値取得部1131と、取得された位置の指令値に対応する、制御周期毎または複数の指定された制御周期における一連の特定部位の位置を求める位置演算部1132と、一連の特定部位の位置の各々を時間の経過順に通る軌跡を示した軌跡データを作成する軌跡データ作成部1133と、軌跡の空間的形態を画像として画面に表示するための画像データを軌跡データを用いて作成する画像データ作成部1134と、画像データを用いて画像を画面に表示させる表示制御部1011とを備える。
(もっと読む)
表示装置、表示方法、プログラム、仮想機構ライブラリ、およびコンピュータ読み取り可能な記録媒体
【課題】制御対象装置ごとに外観を忠実に再現した3次元モデルを用意することなく、ユーザに制御対象装置の動きを理解させることが可能な表示装置を提供する。
【解決手段】PCは、仮想機構の選択肢を提示し、その選択を受け付ける。仮想機構は、複数の機構要素が連動関係をもって組み合わせられており、特定の制御対象装置の形態の模倣ではない抽象化された形態を備えている。仮想機構の選択肢には、機構要素の種類または機構要素同士の連動関係の態様が互いに異なる複数の仮想機構が含まれる。PCは、制御プログラムの実行結果である一連の位置の指令値または実測値を用いて、制御対象装置に指令値が入力される周期毎またはその周期のうち指定された周期における、選択された仮想機構の状態を示した動画を画面に表示する。
(もっと読む)
ロボットシミュレータ
【課題】ロボットとワークとの位置関係に変化が生じることを前提に、位置関係に変化が生じてもロボットの姿勢が動作可能な領域であるか否かを簡単な処理で判定する。
【解決手段】設置位置判定部67は、ワークに想定される誤差Δpに対応するエンドエフェクタの位置変化量Δrから、線形に近似された演算式を用いてマニピュレータの姿勢変化量Δqiを算出している。すなわち、設置位置判定部67は、演算部52にとって処理が容易な線形式を利用してロボットが作業可能な範囲であるか否かを判定する。
(もっと読む)
加工状況監視装置
【課題】複数のカメラの中から選択されたカメラにより生成される画像を通してオペレータがワークの加工状況を監視することができる加工状況監視装置を提供する。
【解決手段】加工状況監視装置1は、加工プログラムを基に3次元モデルデータを更新する加工シミュレーション実行部16と、複数のカメラ11,12,13,14のカメラパラメータと3次元モデルデータとを基に、ワークにより工具の先端が隠れない2次元画像データを生成可能なカメラ11,12,13,14を加工プログラムのブロック毎に選択するカメラ選択部24と、加工プログラムのブロックと、選択されたカメラとを関連付けて記憶する選択カメラ記憶部25と、選択カメラ記憶部25に格納されたデータを基に、制御装置60から得られる実行ブロックに対応したカメラ11,12,13,14により生成される2次元画像データを画面表示装置66に表示させるカメラ切換部27とを備える。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
板材加工機のワークホルダ段取り情報表示装置
【課題】 スケジュール運転において、ワークホルダの段取りがあることを作業者に事前に知らせることができる段取り情報表示装置を提供する。
【解決手段】 ワークホルダ13の移動部材13に対する現在の取付位置を記憶するワールホルダ取付位置記憶手段69を設ける。加工スケジュールSHの加工プログラムを先読みし、記述されたワークホルダ13の取付位置の情報を抽出して、上記記憶手段69の情報と比較し、ワークホルダ取付位置の変更が必要となることを示す情報を生成する段取り情報生成手段48を設ける。その情報を表示情報生成手段71により表示装置47に表示させる。
(もっと読む)
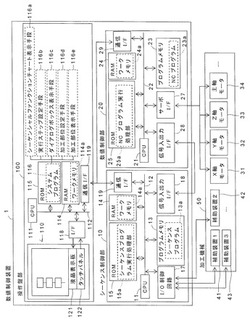
複数のセンサの信号に基づいて機械の異常判定を行う機能を備えた数値制御装置
【課題】数値制御装置の内部情報と複数のセンサ信号とを用い、より確実に機械の異常を判定することが可能な異常判定を行う機能を備えた数値制御装置を提供すること。
【解決手段】機械30の各部に配置された複数のセンサにより検知された振動センサからの信号、温度センサからの信号、および湿度センサからの信号は、センサ信号受信回路24に入力すし、AD変換回路23によりアナログ信号をデジタル信号に変換後、ピークホールド回路22、通信回路21を介して数値制御装置10に入力する。数値制御装置10のマイクロプロセッサ14は、複数のセンサ情報(振動情報、温度情報、湿度情報)と、数値制御装置内部情報15aを取り込み、異常判定処理、異常通知処理、異常状態を数値制御装置10が備えた表示装置に表示したり、機械30を停止するためのラダー出力や、異常状態の判断結果を数値制御装置10のメモリに格納する処理を行う。
(もっと読む)
プログラム作成・教示装置及び方法
【課題】複雑な流れを持つロボットプログラムであっても、短時間で位置データの教示が可能なプログラム作成・教示装置及び方法を得ること。
【解決手段】作成したロボットプログラムを解析して、その中で使用される位置変数を抽出する工程(ステップS11)と、抽出した位置変数の中から、値を教示する必要のある位置変数を教示対象変数として選出する工程(ステップS12)と、ロボットプログラムの処理の流れに基づいて、教示対象変数を使用する命令が実行される順序に応じたグラフ構造で教示対象変数を配列させる工程(ステップS13)と、教示対象変数の教示受付時に、グラフ構造での配列に従って教示対象変数を順次表示する工程(ステップS14)とを有する。
(もっと読む)
ロボットのオフライン教示方法
【課題】ティーチングデータの作成を容易とするロボットのオフライン教示方法を提供する。
【解決手段】ロボットのオフライン教示方法は、複数の仮想教示点を設定するステップ(STEP2)、始点と終点とを含む一部の仮想教示点において仮想ツールの姿勢を設定するステップ(STEP3〜7)、一部の仮想教示点間の補間動作を実行するステップ(STEP8)、補間動作実行時の仮想ツールの位置及び姿勢を所定間隔毎に補間動作点として記憶するステップ(STEP9)、他の仮想教示点毎に、記憶された補間動作点のうち所定の選択基準を満たす補間動作点を選択するステップ(STEP11,12)、他の仮想教示点毎に、選択された補間動作点の姿勢データを読込み、読み込んだ姿勢データを他の仮想教示点の姿勢データとして記憶させるステップ(STEP13〜16)を有する。
(もっと読む)
1 - 20 / 63
[ Back to top ]