
Fターム[3D114CA10]の内容
自動車の製造ライン・無限軌道車両・トレーラ (5,462) | ラインの構成 (829) | 塗装、乾燥、シール、防錆処理ライン (111)
Fターム[3D114CA10]に分類される特許
1 - 20 / 111
テープ貼着工具
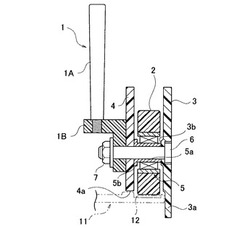
【課題】テープを相手部材の側縁部に沿って容易に貼着できるテープ貼着工具の提供を図る。
【解決手段】把手1Aを把持してテープガイド3の位置決め部3aをドアトリム11の側縁部に当接させて、ドアトリム11の所定位置に貼着した不織布テープ12の貼着始端上にローラ2を押し当てて、テープ貼着方向へ転動させる。これにより、不織布テープ12はテープガイド3,4によってテープ幅方向の遊動が規制されてローラ2とドアトリム11面との間に逐次遊動されると共に、ドアトリム11の側縁部に沿って整然と貼着される。
(もっと読む)
搬送処理装置

【課題】搬送台車上の定位置に積載されて搬送される複数種類の車体を自動塗装機によって自動塗装する塗装ラインなどに効果的に活用出来る搬送処理装置を提案する。
【解決手段】搬送台車1には、車種情報記憶部21と、搬送台車1の現在位置を判別する現在位置情報取得手段26と、車種情報と現在位置情報とを地上制御装置16に伝送する情報伝送手段が設けられ、地上制御装置16には、自動塗装機6を制御するときの搬送台車の現在位置が車体Bの種別毎に設定記憶される車種別スプレーノズル制御情報記憶部29と、自動塗装機6に制御信号を送信する比較演算制御部30が設けられ、この制御部30が、前記記憶部29の記憶情報と、自動塗装機6の位置を通過しようとする搬送台車1から受け取った種別情報及び現在位置情報とを照合して、前記記憶部29の記憶情報通りに、搬送台車1の現在位置に合わせて自動塗装機6を制御する構成。
(もっと読む)
シール部を備えるワークの製造方法及びシール部を備えるワーク
【課題】2部材間を密封するシール部の密封性を向上させるシール部を備えたワークの製造方法及びシール部を備えたワークを提供する。
【解決手段】樹脂ガラス2と取付枠3との間にシーラ4を塗布し、シーラ4の始端部4a上にシーラ4の終端部4bを乗り上げて会合させることで形成されたシール部5を備えるフロントウィンドパネル1の製造方法であって、シーラ4の会合部4cにおいて、樹脂ガラス2に樹脂ガラス2と取付枠3との間を狭める突起2aを設けることで、シーラ4の会合部4cにおける隙間の発生を防止する。
(もっと読む)
塗装システムおよびドア開閉用ロボットの開閉ハンド
【課題】走行装置を用いることなくドアの内側部の塗装を行うことが可能な塗装システムを提供する。
【解決手段】この塗装システム100は、車体120を搬送するコンベア10と、高さ位置H2に固定的に設置され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の内部を少なくとも塗装する塗装用ロボット20と、高さ位置H2とは異なる高さ位置H3に固定的に設置されるとともに塗装用ロボット20と作業範囲がオーバーラップ可能なように構成され、コンベア10による車体120の搬送動作に追従するように姿勢を変化させて車体120のドア121の開閉およびドア開放状態の保持を行うドア開閉用ロボット30とを備える。
(もっと読む)
走行型浸漬処理装置
【課題】自動車の車体の塗装システムにおいて、車体を搬送させながら被処理液中に前転回動させて浸漬処理する手段として活用出来る走行型浸漬処理装置を提供する。
【解決手段】搬送用走行体(1)には、その走行速度を車体(W)を前転回動させる回転軸(4)の回転角(θ)に対応して制御する走行速度制御装置(6)が設けられ、この走行速度制御装置(6)が、車体(W)が回転軸(4)の真上で水平に位置する正立姿勢から前転方向の90度回倒姿勢に達するまでは、回転軸(4)から一定距離を隔てた車体(W)側の基準位置(P)に対する基準搬送速度に対して搬送用走行体(1)の前進速度を漸減させ、90度回倒姿勢から270度回倒姿勢に達するまでは搬送用走行体(1)の前進速度を前記基準搬送速度に対して漸増させ、270度回倒姿勢から元の正立姿勢に戻るまでは搬送用走行体(1)の前進速度を前記基準搬送速度に対して漸減させる制御を行う構成。
(もっと読む)
塗装方法
【課題】塗装作業の効率化を図ることができながら、自動車ボデ−の製造工程における製造コストおよび設備コストの低減を図ることができる自動車ボデ−の塗装方法を提供すること。
【解決手段】電着塗装された金属鋼板に、線膨張率が4.0×10−5/℃m以下ポリプロピレン樹脂部材を組み付け(組み付け工程)、金属鋼板に組み付けられたポリプロピレン樹脂部材に、活性メチレン系ブロックポリイソシアネートおよび塩素化ポリオレフィンを含有する導電性プライマーを塗布し(塗布工程)、その後、酸触媒を含有する中塗塗料を塗装して(中塗工程)、さらに、触媒を含有する上塗塗料を塗装して(上塗工程)、140℃以下で焼き付ける(焼付工程)。
(もっと読む)
シーリング剤の塗布方法、及び塗布装置
【課題】生産性を低下させることなく、シーリング剤の接着強度を高める。
【解決手段】ドアパネル13の継ぎ目16に対するシーリング剤14の塗布方法であって、アームロボット30のアーム先端39に取り付けられたヘッド装着部50に装着された2本のヘッド61、71のうち、一方側の大気圧プラズマヘッド61を用いて、前記ドアパネル13の継ぎ目16に対してプラズマを吹きかけるプラズマ処理を行い、前記ヘッド装着部50に装着された2本のヘッドのうち、他方側の塗布ヘッド71を用いて、前記プラズマ処理後の前記ドアパネル13の継ぎ目16に対して前記シーリング剤14を塗布する塗布処理を行う。
(もっと読む)
車両用ガラスの処理装置
【課題】よりシンプルな構成によって、車両用ガラスを迅速に処理することにある。
【解決手段】位置決め部材20の基準点を搬送部材10の基準位置に配置しつつ位置決め部材20を搬送部材10上に配置するとともに、検出部材70によって、車両用ガラスWの基準点と位置決め部材20の基準点の双方をそれらの上方から検出可能とし、検出部材70が、車両用ガラスWの基準点と位置決め部材20の基準点がずれていることを検出したとき、移動部材によって位置決め部材20を水平方向に移動させて同ずれを補正したのち、車両用ガラスWを持ち上げる構成である。
(もっと読む)
ドア治具
【課題】スライドドアを車体に対して各種作業に適した状態で位置決め保持可能とし、かつ搬送ライン周辺の作業スペースの縮小を図ることができるドア治具を提供する。
【解決手段】第一アーム8及び第二アーム9の一端は、車体側ベース部2のブラケットに回動軸を異にして回転自在に接続され、第一アーム8及び第二アーム9の他端は、ピボット部材13の一側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の一端は、ピボット部材13の他側に回動軸を異にして回転自在に接続され、第三アーム27及び第四アーム28の他端は、ヒンジ部材37に回転軸を異にして回転自在に接続され、スライドドア側ベース部3は、ヒンジ部材37に連結軸46を介して回転自在に支持される。
(もっと読む)
ドア取り外し装置及び方法
【課題】ロボットの台数を削減して設備のレイアウト性を向上させることが可能な、ドア取り外し装置及び方法を提供すること。
【解決手段】双腕ロボット11は、自動車のボディにボルトで固定されたドアを、当該ボディから取り外すドア取り外し装置として機能する。双腕ロボット11は、ドアを把持する第1把持治具23R1を有する第1アーム22R1と、ボルト外し機構の一例のボルト緩めツール74とドア把持パッド72とを共に含む第2把持治具23R2を有する第2アーム22R2と、ドアの重力方向の荷重を受ける荷重受けとしてのドアH受け部材24と、を備える。
(もっと読む)
ドア把持装置及び方法
【課題】小型化されたツールを用いる双腕ロボット単体のみで、ドアを傷つけないように把持することが可能な、ドア把持装置及び方法を提供すること。
【解決手段】双腕ロボット11は、ドア91等の重力方向の力を受ける荷重受けとしてのドアH受け部材(その構成要素であるウレタンパッド42)と、ドアを把持する第1把持治具23R1と、を備えている。第1把持治具23R1は、2点PA,PBの相対距離が可変な、ドア91の開口部120等に当接する2つのドア把持パッド53,54を有している。一方のドア把持パッド53は、ドアの荷重方向の力を受ける方向に開口部の点PAに当接し、他方のドア把持パッド54は、荷重受け(ウレタンパッド42)とドア把持パッド53とにより発生するモーメントを受ける方向に開口部の点PBに当接する。
(もっと読む)
ガラス位置決め装置およびガラス位置決め方法
【課題】ガラスの寸法にバラつきがあったとしても、接着剤の塗布面の高さが一定になるようにガラスを位置決めすることを目的とする。
【解決手段】ガラスGに接着剤を塗布するために該ガラスを所定の位置に位置決めするガラス位置決め装置10であって、前記ガラスを挟んだ両側に配設され、前記ガラスを挟持する方向に沿って移動可能な位置決め部材31a、31bと、前記位置決め部材31a、31bの前記ガラス側にそれぞれ配設され、前記位置決め部材31a、31bが前記ガラスを挟持する方向の移動と共に移動され、前記ガラスを下方から固定する固定部材53a、53bと、を備えていることを特徴とする。
(もっと読む)
成形天井材用接着剤塗布装置
【課題】設置面積を縮小することができる、成形天井材用接着剤塗布装置を提供する。
【解決手段】接着剤塗布ステーション4において、成形天井材2の下端部が保持機構12に保持されるとともに、成形天井材2の他方面2Bが第1支持部材25に支持されることにより、成形天井材2は、他方面2B側に傾倒した姿勢に配置される。そして、その状態で、塗布ロボット3により、成形天井材2の一方面2Aに接着剤が塗布される。その後、保持機構12による成形天井材2の保持が解除されるとともに、第1支持部材25による成形天井材2の支持が解除されると、成形天井材2は、その下端部が接着剤塗布ステーション4に残ったまま、自重により左側にさらに傾倒して、第2支持部材28にもたれ掛かる。その後、押圧部材30により、成形天井材2の下端部が接着剤塗布ステーション4から搬出ステーション5に移動される。
(もっと読む)
搬送装置
【課題】外部入力信号機器を減らすことができる搬送装置を提供する。
【解決手段】搬送経路上にてパレット21を搬送または停止する搬送装置10であって、パレット21はチェーン25を備え、チェーン25に歯合するスプロケット31と、スプロケット31を駆動し、モータ33と、モータ33の回転角を検出するエンコーダ34と、を備え、エンコーダ34からの検出値に基づいてモータ33の回転を制御するサーボモータ機構32と、サーボモータ機構32によってパレット21の搬送または停止を制御するコントローラ50と、を具備し、コントローラ50は、パレット21が基準位置を通過したときをサーボモータ機構32のエンコーダ34によって0点基準位置として検出し、0点基準位置からの積算検出値に基づいて、パレット21を搬送または停止する。
(もっと読む)
乾燥炉及び乾燥方法
【課題】被乾燥物中の暖まり易い部位に対して与えていた余分な熱量を削減できる乾燥技術を提供することを課題とする。
【解決手段】乾燥炉にて、(b)に示される時間Taの間、車体のサイドシルに、加熱手段から出る放射熱を加える。
【効果】サイドシルに放射熱を加えることで、サイドシルの温度を車体のドアアウタパネルの温度に確実に近似させることができる。サイドシルとドアアウタパネルを略同一に昇温させることができるので、ドアアウタパネルに対して余分な熱を与えることがない。したがって、ドアアウタパネル(被乾燥物中の暖まり易い部位)に対して与えていた余分な熱量を削減できる乾燥技術を提供できる。
(もっと読む)
ドア固定治具
【課題】 簡易な構成で車体に対してドアを所定の開放状態に保持することができるドア固定治具を提供する。
【解決手段】 車体Wに対してドアDを所定の開放状態に保持するドア固定治具10であって、ドアチェッカー1のためにドアDに形成された四角形状の開口孔3に係合する第1取付部20と、この第1取付部20と第1アーム11で連結され、車体Wに形成されたドアチェッカー1のブラケット固定用のねじ孔5に係合する第2取付部30と、第1アーム11に連結された第2アーム12の先端に設けられ、車体Wのドア開口部周縁のフランジ部13に係合する第3取付部40からなる。
(もっと読む)
塗装システム
【課題】本体と、該本体に対して揺動可能に連結された部材とを有する被塗装物に対して、効率よく塗装を施す。
【解決手段】塗装システムは、下流側の自動車車体14のボンネット22及びトランク26に対して塗装を施す第1塗装ロボット16a、16bと、ボンネット22及びトランク26を開閉するためのオープナーロボット18と、上流側の自動車車体14aの乗員室ドア24a〜24dに対して塗装を施す第2塗装ロボット16c、16dとを有する。第1塗装ロボット16a、16bによる自動車車体14のボンネット22の内側への塗装作業が終了した後、オープナーロボット18が自動車車体14のボンネット22を閉止する。この閉止の間、第1塗装ロボット16a、16bは、自動車車体14のBピラー40a、40bに対して塗装を施す。
(もっと読む)
ドア治具
【課題】ドア治具を介した車体に対するドアの係脱をロボットにより操作する場合に、ドア治具の位置検出や把持機構、複雑なロボットのティーチング作業が不要となるドア治具を提供する。
【解決手段】車体wのセンターピラーw1に取り付けられる車体側治具10とドアdに取り付けられるドア側治具30とから構成され、車体側治具10に形成した車体側係合部14とドア側治具30に形成したばね線材からなる弾性部材35とを係合させることにより、車体wに対してドアdを所定の開度で保持するドア治具1とした。車体側係合部14は棒状部材として構成され、弾性部材35は、車体側係合部14を乗り上げるように弾性変形する起立部42と、車体側係合部14に係合する係合凹部24とを有する。
(もっと読む)
加工システム及び加工方法
【課題】自動車の生産工程のうちルーフ工程の省スペース化や作業の効率化を図ること。
【解決手段】ハンドジグ付ロボット11は、ワーク21をパネルストック12から取り出す。ハンドジグ付ロボット11は、ワーク21を固定シーリングガン13に対して相対的に移動させる。これにより、固定シーリングガン13から噴出されるシーラが、ワーク21に塗布される。ハンドジグ付ロボット11は、ワーク21をシーラ用位置決め治具14に固定する。ハンドジグ付ロボット11は、ワーク21を溶接用位置決め治具15に固定させ、ワーク21に対してスポット溶接を行う。ハンドジグ付ロボット11は、ワーク21を払出し場所(図示せず)に払い出す。
(もっと読む)
対象物を支持構造に固定するためのロック装置及び同装置を有するスキッド
本発明は、解放位置とロック位置との間で移動可能な固定部材72と、カウンター部材28とを有する、対象物12、特に車両ボディを支持構造14、特にスキッド、に取外し可能に固定する装置に関する。対象物12を、それに対応づけられた保持構成部分34を介してロック位置内の固定部材72とカウンター部材28との間でロック可能である。固定部材72が、ロック位置において、カウンター部材28上に近づき、かつそれから離れるように移動可能である。固定部材72が、ロック位置において、付勢装置136によって付勢を受けながら対象物12の保持構成部分34に対してカウンター部材28の方向に押圧可能である。本発明は、さらに、上記の固定装置を有しているスキッドに関する。  (もっと読む)
(もっと読む)
1 - 20 / 111
[ Back to top ]