
Fターム[3D232EC03]の内容
走行状態に応じる操向制御 (73,124) | 制御対象(制御機構) (6,276) | 油圧式制御装置 (407) | 供給油量調整 (210) | ポンプ (83)
Fターム[3D232EC03]に分類される特許
1 - 20 / 83
油圧式パワーステアリング装置
【課題】切り込み状態から操舵部材が中立位置に向かって戻される場合に、切り込み方向の操舵補助力が不足するのを抑制できる油圧式パワーステアリング装置を提供する。
【解決手段】ダンピング制御部62は、検出操舵トルクThの方向が切り込み方向でありかつその大きさ(絶対値)が第1の閾値以上であり、操舵角速度ωhの方向が切り戻し方向でありかつその大きさ(絶対値)が第2の閾値以上のときに、操舵角速度ωhに応じたダンピングトルク指令値TD*を設定する。加算部63は、基本アシストトルク指令値設定部61によって設定される基本アシストトルク指令値TAO*に、ダンピング制御部62によって生成されるダンピングトルク指令値TD*を加算する。
(もっと読む)
ハイブリッド車両のパワーステアリング装置

【課題】ハイブリッド車両の走行状態に関わらず、良好な燃費性能を確保しつつ、大きな操舵トルクを出力可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】ハイブリッド車両1のパワーステアリング装置20は、変速機5にサブクラッチ40を介して連結され、エネルギーを蓄積可能なアキュムレータ41を備え、ステアリング30から入力される操舵力が所定値以上である場合、増幅手段24の駆動源としてアキュムレータを選択し、ステアリングから入力される操舵力が所定値未満である場合、増幅手段の駆動源として電動モータ25を選択することを特徴とする。
(もっと読む)
ハイブリッド車両のパワーステアリング装置
【課題】ハイブリッド車両の走行状態に関わらず、良好な燃費性能を確保しつつ、大きな操舵トルクを出力可能なハイブリッド車両のパワーステアリング装置を提供する。
【解決手段】ハイブリッド車両1のパワーステアリング装置20は、モータ回生走行時やモータ発進時にエンジン2が停止状態にあり、且つ、クラッチ3が切断状態にある場合、ハイブリッド車両1の走行速度に応じて、パワーステアリング装置において操舵トルクを増幅する増幅手段24の駆動源である、電動モータ25とエンジン2を選択的に切り替える。
(もっと読む)
カウンタウエイト台車制御装置
【課題】カウンタウエイト台車の旋回走行時に車輪の旋回半径が大きくなることを抑制し、クレーンの作業効率を向上させる。
【解決手段】カウンタウエイト台車制御装置1は、車輪40の操舵角度θを制御する操舵アクチュエータ50と、操舵アクチュエータ50を制御する制御手段80と、を備える。制御手段80は、上部本体20の旋回方向を判別可能な信号が入力される旋回方向入力手段81を備える。制御手段80は、平面視において、車輪40の位置における車輪40の旋回軌道Cの接線L1よりも車輪40(の前後方向前側)が内側を向くように操舵アクチュエータ50を制御する。
(もっと読む)
パワーステアリング装置
【課題】省電力化が図れるとともに、操舵補助力が必要な場合に電動モータの駆動が停止されたり、電動モータの回転速度が低速に制御されたりするのを回避できるパワーステアリング装置を提供する。
【解決手段】電動モータ24が通常モードで駆動制御されている場合において、車速Vsが閾値A1以下でかつ操舵角速度Vhが閾値B1以下でかつモータ電流Imが閾値C1以下の状態が閾値D1で規定される第1の所定時間以上継続したときには、制御モードが省電力モードに切り換えられる。これにより、電動モータ24の目標回転速度Vp*が第1の目標回転速度Vp1*から第2の目標回転速度Vp2*に切り換えられる。
(もっと読む)
油圧式パワーステアリング装置
【課題】油圧制御バルブの開度が急変して作動油の圧力が低下した場合に、パワーシリンダへの作動油の供給量が低下するのを抑制できる油圧式パワーステアリング装を提供する。
【解決手段】ポンプ回転数補正部63は、バルブ開度指令微分値演算部71と、ポンプ回転数補正値演算部72と、補正値加算部73とを含んでいる。バルブ開度指令微分値演算部71は、バルブ開度指令値設定部52によって設定されるバルブ開度指令値θB*の時間微分値(バルブ開度指令微分値)を演算する。ポンプ回転数補正値演算部72は、バルブ開度指令微分値に基づいて、ポンプ回転数指令値VP*の補正値(ポンプ回転数補正値)を演算する。補正値加算部73は、ポンプ回転数補正値を、ポンプ回転数指令値設定部62によって設定されたポンプ回転数指令値VP*に加算する。
(もっと読む)
ソレノイドバルブ装置、およびこれを備える油圧装置、およびこれを備える油圧パワーステアリング装置
【課題】弁体の位置を検出することにともない弁体の移動が妨げられることを抑制することのできる構造のソレノイドバルブ装置、およびこれを備える油圧装置、およびこれを備える油圧パワーステアリング装置を提供する。
【解決手段】油圧パワーステアリング装置には、駆動電流の供給を受けて磁束を発生するソレノイド75と、ソレノイド75から生じる磁束により移動する弁体としてのスプール74とを含むソレノイドバルブ70と、このソレノイドバルブ70を制御する制御装置とが設けられている。制御装置は、駆動電流に交流成分を含めてソレノイド75に供給し、ソレノイド75のインピーダンスを検出する。そして、ソレノイド75に供給している駆動電流と検出したインピーダンスとの関係が基準位置指標と整合していないとき、ソレノイド75への駆動電流の供給を停止する。
(もっと読む)
油圧パワーステアリング装置
【課題】ステアリングホイールの操作時に油圧装置によるアシストが行なわれない状況が生じる頻度を少なくすることのできる油圧パワーステアリング装置を提供する。
【解決手段】操舵トルクに応じて出力が変化するトルクセンサ14と、このトルクセンサ14の出力に応じて操舵装置であるステアリング装置10に付与する油圧の大きさが変更される油圧装置20とを含む油圧パワーステアリング装置1において、トルクセンサ14の出力が異常を示すとき、操舵速度に応じて油圧装置20の油圧が変更される。
(もっと読む)
油圧式パワーステアリング装置
【課題】アシスト力の制御の自由度が高い油圧式パワーステアリング装置を提供する。
【解決手段】油圧式パワーステアリング装置1は、転舵シャフト16に設けられたピストン42によりその内部が第1油圧室43及び第2油圧室44に区画される油圧シリンダ21と、この油圧シリンダ21に作動油を供給する可変容量式の電動ポンプ22とを備えている。そして、第1油圧室43及び第2油圧室44に対する作動油の給排を切替可能な切替弁23と、トルクセンサ32、操舵角センサ33及び車速センサ34と、各センサ32〜34の検出結果に基づいて油圧シリンダ21に作動油を給排する際の給排態様を設定し、その設定された給排態様に応じて切替弁23の切替位置と電動ポンプ22の作動油供給量を制御するECU31とを含む。
(もっと読む)
パワーステアリング装置
【課題】大舵角時における保舵力および操舵トルクの増大を抑制しつつ、転舵後の切り戻し時における操舵角の戻り性を改善したパワーステアリング装置を提供する。
【解決手段】操舵アシスト用の電動モータ1を駆動制御するコントロールユニット10が、操舵角に基づいて算出したステアリング戻し制御トルクを基本目標アシストトルクに加算して目標アシストトルクを算出するステアリング戻し制御部24を備えている。ステアリング戻し制御部24は、操舵角が予め定めた戻し制御設定角度よりも小さいときに、上記ステアリング戻し制御トルクを反操舵角方向に設定する一方、上記操舵角が上記戻し制御設定角度以上のときに、上記ステアリング戻し制御トルクを零または操舵角方向に設定する。
(もっと読む)
操舵制御装置及び操舵制御方法
【課題】車速が大きく高い応答性が求められる際には高い転舵応答性を確保するとともに、耐久性の低下抑制を図る。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角と実転舵角との差分を基に、トルク指令値を算出するトルク指令値演算部61と、トルク指令値を基に、駆動電流値を算出する転舵指令電流演算部62と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部63と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、車速が小さいほど、第1モータ駆動電流値を小さく補正すると共に第2モータ駆動電流値を大きく補正するゲイン設定部64、乗算器65,66とを備える。
(もっと読む)
操舵制御装置及び操舵制御方法
【課題】より高い転舵応答性の発揮及び駆動する部材の耐久性の低下抑制の両立を図る。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角と実転舵角との差分を基に、トルク指令値を算出するトルク指令値演算部61と、トルク指令値を基に、駆動電流値を算出する転舵指令電流演算部62と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部63と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、直進走行状態に近いほど、第1モータ駆動電流値を大きく補正すると共に第2モータ駆動電流値を小さく補正するゲイン設定部64、乗算器65,66とを備える。
(もっと読む)
操舵制御装置及びその方法
【課題】互いに干渉しない独立した二つの操舵機構を有する操舵制御装置において、転舵輪の転舵応答性を高くする。
【解決手段】操舵制御装置は、転舵輪11L,11Rの目標転舵角を算出する反力モータECU50と、転舵輪11L,11Rの実転舵角を検出する操舵角センサ3と、目標転舵角と実転舵角との差分を基に、駆動電流値を算出する転舵指令電流演算部と、駆動電流値を、第1及び第2転舵モータ32,43それぞれを駆動する第1及び第2モータ駆動電流値に配分する転舵電流配分演算部と、第1モータ駆動電流値を基に第1転舵モータ32を駆動制御すると共に、第2モータ駆動電流値を基に第2転舵モータ43を駆動制御する第1及び第2転舵モータECU60,70と、目標転舵角と実転舵角との差分を基に、第1モータ駆動電流値を増加補正する応答遅れ補償電流演算部及び加算器とを備える。
(もっと読む)
ポンプ装置
【課題】直進走行時におけるポンプのエネルギ損失を抑制し得るポンプ装置を提供する。
【解決手段】電子コントローラ40により、少なくとも車速Vが第1所定車速以上である場合を直進走行状態とみなし、電磁弁16に与える指令電流を操舵角θ、操舵角速度ω及び操舵角加速度ωdの実際の検出値又は算出値に基づいて算出するのではなく、操舵角θ、操舵角速度ω及び操舵角加速度ωdを「0」として必要最小限の目標吐出流量から指令電流を算出して、これによって算出された指令電流をもって電磁弁16を介してカムリングの偏心を抑制するように制御したことにより、直進走行状態において僅かなステアリング操作やキックバック等の外乱によるステアリング動作等が発生した場合でも、ポンプの固有吐出量(吐出流量)が過敏に増加してしまうおそれがなく、当該ポンプのエネルギ損失の低減化に供される。
(もっと読む)
パワーステアリング装置
【課題】車両の加速度に依存する操舵フィーリングの悪化の問題を改善する。
【解決手段】操舵補助力を発生用の油圧ポンプを駆動するための電動モータ24を、ECU25がPWM制御する。ECU25は、目標回転速度設定部36が設定する目標回転速度ω*に応じて、電動モータ24を制御する。目標回転速度設定部36は、基本目標回転速度設定部41、ゲイン設定部42および乗算器43を備えている。基本目標回転速度設定部41は、操舵速度および車速に応じて基本目標回転速度を設定する。ゲイン設定部42は、車両の加速度に応じたゲインを設定する。乗算器43は、ゲイン設定部42によって設定されたゲインを基本目標回転速度に乗じて、最終的な目標回転速度ω*を求める。
(もっと読む)
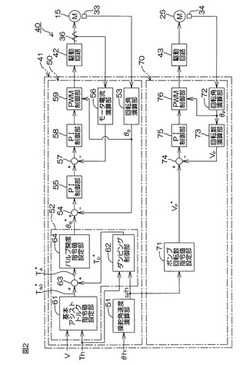
パワーステアリング装置
【課題】高効率で且つ操舵フィーリングに優れたパワーステアリング装置を提供する。
【解決手段】操舵補助力を発生用の油圧ポンプ22を駆動するための電動モータ24を、ECU25がPWM制御する。ECU25は駆動方式を120度通電方式および180度通電方式に択一的に切り替える駆動方式切替部38を備える。駆動方式切替部38は、実回転速度演算部35により演算された実回転速度ωに基づいて駆動方式を切り替える通常制御部381と、通常制御部381による切替に拘らず目標回転加速度演算部40により演算された目標回転加速度αに基づいて駆動方式を切り替える最適化制御部382とを含む。
(もっと読む)
電動パワーステアリング装置
【課題】電動ステアリング力を油圧アシスト力によって補助する、車両、船舶推進機等のための電動パワーステアリング装置において、車庫入れ等における操舵感を向上するとともに、油圧アシスト力の応答性を向上する。
【解決手段】電動パワーステアリング装置において、車速が停止又は一定値より低いときに電動アシスト力Aだけではアシスト不足になる転舵角θより小なる転舵角θから増加する各転舵角θに対して要求される理想的な理想総合アシスト力Mを予め定めるとともに、各転舵角θにおいて電動アシストモータが出力する電動アシスト力Aが上記理想総合アシスト力Mに対する差分を目標油圧アシスト力Baとして予め定めるアシスト力設定部を有してなる。
(もっと読む)
操舵制御装置
【課題】互いに干渉しない独立した二つの操舵機構を備え、双方において操舵補助力の伝達ロスの発生を防止し得る操舵制御装置を提供する。
【解決手段】ステアリングホイール1に連係される第1操舵軸3と、いわゆるラックピニオン機構を介して転舵輪2L,2Rに連係される第2操舵軸7と、がクラッチ11を介して分離してなる操舵制御装置であって、運転者の操舵力を補助する二つの第1、第2操舵機構8,10を設けると共に、第1操舵機構8を第1操舵力発生モータ16によってピニオン軸6に回転力を付与する構成とし、第2操舵機構10を油圧によってラックバー5に推進力を付与する構成とした。
(もっと読む)
車両用パワーステアリングシステム
【課題】 車両用パワーステアリングシステムにて、エンジンによって駆動される補機を駆動するベルト・プーリー機構の負荷を低減すること。
【解決手段】 車両用パワーステアリングシステムは、電気モータを動力源とする電動パワーステアリング装置と、エンジンによって駆動される油圧ポンプを動力源とする油圧パワーステアリング装置と、エンジンによって駆動されて補機を駆動するベルト・プーリー機構を備えている。また、車両用パワーステアリングシステムは、前記ベルト・プーリー機構に加わる実負荷に相当する想定負荷を演算する負荷演算手段(ステップS12)を備えるとともに、前記想定負荷に応じて前記実負荷を低減すべく前記電動パワーステアリング装置が担う操舵補助力と前記油圧パワーステアリング装置が担う操舵補助力の分担配分を変更する分担配分変更手段(ステップS11とS13〜S18)を備えている。
(もっと読む)
パワーステアリング装置
【課題】高効率で且つ操舵フィーリングに優れたパワーステアリング装置を提供する。
【解決手段】操舵補助力を発生用の油圧ポンプ22を駆動するための電動モータ24を、ECU25がPWM制御する。ECU25は駆動方式を120度通電方式および180度通電方式に択一的に切り替える駆動方式切替部38を備える。駆動方式切替部38は、回転速度演算部35により演算された回転速度に基づいて駆動方式を切り替える通常制御部381と、通常制御部381による切替に拘らず電流検出回路29により検出された電流に基づいて駆動方式を切り替える最適化制御部382とを含む。
(もっと読む)
1 - 20 / 83
[ Back to top ]