
Fターム[5F031GA44]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 移送装置、手段 (13,292) | アーム部 (5,670) | 駆動機構 (1,726) | パンタグラフ機構 (131)
Fターム[5F031GA44]に分類される特許
1 - 20 / 131
半導体製造装置
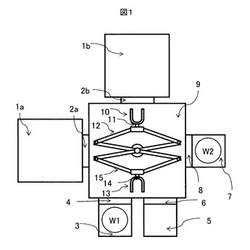
【課題】半導体製造装置において、被処理基板W1の処理のスループットを落とすことなく、異物が被処理基板W1に付着しない状態を長時間保ちたい。
【解決手段】被処理基板W1に処理を施す複数の処理室1a、1bと、複数の処理室の各室に該被処理基板W1を搬送するための搬送機構と、搬送機構をその内部に有する搬送室9からなる半導体製造装置において、搬送室9内の搬送機構は、接地された導電性ハンド13と、絶縁性ハンド10を備えており、異物付着専用基板W2、および異物付着専用基板W2の搬入搬出室7を設ける。異物付着専用基板W2に異物を付着させ、さらに異物が付着した異物付着専用基板W2を交換できるようにした。
(もっと読む)
基板搬送システム

【課題】搬送アームのベース上方に設けた撮像装置だけで,搬送アームのピック上の基板を検出する。
【解決手段】搬送アーム210と共に旋回自在に支持され,ピック側に配置されるピック側ミラー310を備えたピック側ユニット304とベース側に配置されるベース側ミラー312を備えたベース側ユニット306とを少なくとも有し,ピック側ミラーはピックに保持されたウエハWの周縁を含む画像をベース側に向けて反射するように配置し,ベース側ミラーはピック側ミラーからの画像をベースの上側に向けて反射するように配置したミラーユニットと,ベース側ミラーからの画像が撮像領域に含まれるようにベースの上方に設けられた撮像装置130とを設け,撮像装置で取り込んだ当該画像に基づいて基板状態を検出する。
(もっと読む)
基板処理装置
【課題】搬送ロボット21,22を設置した搬送室11,12が並設され、搬送室の並設方向中間部を除く各搬送室の周囲複数箇所に処理室F1〜F4,R1〜R6が配置され、搬送室の並設方向中間部に設けられた基板の受渡し場所M1〜M3に、基板Sを各搬送ロボットとの間で受渡し自在に支持する基板支持部材3が配置された基板処理装置であって、スループットを向上できるようにしたものを提供する。
【解決手段】基板支持部材3は、基板Sを支持する少なくとも上下2段の支持部31,32を備える。また、上段支持部32に支持される基板Sの下面から剥離したパーティクルが下段支持部31に支持される基板Sに落下付着することを防止するため、上段支持部32と下段支持部31との間に遮蔽板33を設ける。
(もっと読む)
駆動装置及び基板処理システム
【課題】空間を分離する際のシール性及びメンテナンス性に優れた駆動装置を提供する。
【解決手段】同軸上に2つの回転軸(外側出力軸150及び内側出力軸250)を有する駆動装置80において、本体ケース300と外側出力軸150との間に真空シール170を配置し、更に、外側出力軸150と内側出力軸250との間に真空シール270を配置することで、駆動装置80の本体ケース300内の空間と、本体ケース300外の空間とを分離する。これにより、駆動装置80を減圧環境下で用いる場合であっても、駆動装置80の本体ケース300内の空間(大気圧環境側)と減圧環境側の空間とを分離することができるので、駆動装置80の減圧環境下での使用が可能となる。
(もっと読む)
基板保持部材および当該半導体保持部材への半導体基板の取り付け位置調整方法
【課題】部材の位置合わせに係る工程数を減少させ、位置合わせに要する時間を短縮し、半導体製造装置の生産性を向上させる。
【解決手段】基板保持部材1は、半導体基板11を保持する保持面を備えたベース2と少なくとも1つの開口部を有していて保持面と対向するようにベース2上に支持されたマスク9とを備えている。さらに、基板保持部材1は、保持面とマスク9との間に、半導体基板11が挿通される基板挿通部14を備えている。
(もっと読む)
搬送ロボット
【課題】ロボットアームの伸縮過程で湾曲による鉛直方向に沿った高さ位置の変動を抑制し、かつ、軽量化も可能な搬送ロボットを提供する。
【解決手段】ロボットアーム11は、それぞれのアーム部21a、21bの長手方向Lに沿った全長のうち少なくとも一部は、長手方向Lに対して垂直な方向に広がる断面の形状が長方形を成す第一領域E1と、この長方形の一方の長辺W1から直角な方向に向けて突出した第二領域E2とからなる形状に形成されている。例えば、第一領域E1を成す長方形の一方の長辺W1の中央部分を中心にして、矩形の第二領域E2が突出しているような、断面が略T字型となるように形成されていれば良い。
(もっと読む)
搬送車
【課題】被搬送物に収納された平板状部材の収納状態を精度良く検出することができる搬送車を提供する。
【解決手段】搬送車1は、所定の方向に沿って走行可能に設けられた走行台車3と、走行台車3に対して上下方向の軸中心に回転可能に設けられたターンテーブル9と、ターンテーブル9に設置され、カセットWを載置すると共に、カセットWの移動を行う移載装置11と、カセットWにおけるガラス基板Gの収納状態を検出光Lにより検出すると共に、その光軸方向が走行台車3の走行方向に沿い且つターンテーブル9と伴に回転しない位置に設置されたマッピングセンサ13と、移載装置11によりカセットWを取り込み、ターンテーブル9を回転させてカセットWを回転させた後に、マッピングセンサ13がカセットWにおけるガラス基板Gの収納状態を検出するように制御するコントローラ15とを備える。
(もっと読む)
基板搬送ロボット
【課題】駆動アーム部材に関節部を介して従動アーム部材321,322を連結して成る屈伸自在な一対のアームと、基板を支持するハンド4とを備え、両アームの従動アーム部材の先端に夫々ギヤ51,52が固定され、両ギヤを互いに噛合させた状態でハンドに軸支した基板搬送ロボットにおいて、ギヤの摩耗を生じてもバックラッシュを適正範囲に簡単に調整できるようにする。
【解決手段】各ギヤ51,52をハンド4に軸支する各支軸61,62を、該各支軸61,62に対し偏心した偏心部6aを介してハンド4に回動調整自在に連結する。また、偏心部6aの外端面に、偏心部6aの回動角を視認するためのマーク6bを付す。
(もっと読む)
基板処理装置及び基板処理方法
【課題】スループットを低下させることなく、時間のロス無しに基板のアライメントを可能とした基板処理装置を提供する。
【解決手段】本発明の基板処理装置は、基板2を出し入れする仕込/取出室3と、前記基板に対して所定の真空処理を行う処理室と、前記仕込/取出室と前記処理室との間における前記基板の受け渡しを行う搬送室と、を備えた基板処理装置であって、前記仕込/取出室は、真空排気可能なチャンバ11と、前記チャンバ内に配され、前記基板が載置される支持部12と、前記支持部上に載置された前記基板の位置ずれ量を検出する測定部と、前記測定部によって検出された前記基板の位置ずれ量に応じて、前記基板の位置を修正するアライメント部と、を有することを特徴とする。
(もっと読む)
回転駆動装置、搬送装置及び回転伝達機構
【課題】複数の回転軸が同軸上に配置される場合であっても回転伝達特性を同一とすることが可能な回転伝達装置を提供すること
【解決手段】本発明の回転伝達装置2は、第1の回転伝達機構と、第2の回転伝達機構とを具備する。
第1の回転伝達機構は、第1のハウジング32と、第1の駆動源31によって回転駆動される第1の駆動軸33と、第1の従動軸36と、第1の駆動軸33の回転を第1の従動軸36に伝達する第1の伝達部34、35とを有する。
第2の回転伝達機構は、第2のハウジング42と、第2の駆動源41によって回転駆動される第2の駆動軸43と、第1の従動軸36と同軸である第2の従動軸46と、第1の伝達部34、35と同一の構造を有し第2の駆動軸43の回転を第2の従動軸46に伝達する第2の伝達部44、45とを有する。
(もっと読む)
基板処理装置の制御方法
【課題】処理時間を短縮しスループットを向上するする。
【解決手段】複数の処理室C,Eが個別に仕切りバルブ3を介して連結された搬送室Tを介して処理室Cから処理室Eへ基板Sを移動させる搬送手段12を有する基板処理装置CTにおいて、搬送手段のロボットアーム12aを同一平面内の旋回動作及び伸縮動作させ、旋回方向に沿って配置された複数の処理室間で前記基板を搬送する際に、搬送手段の一連の動作および前記仕切りバルブの開閉動作を1つのコマンドで実行するとともに、複数の処理室における仕切りバルブが同時に開いた状態を有してなる。
(もっと読む)
基板搬送ロボット
【課題】真空処理装置内で使用される基板搬送ロボットであって、ロボットアームの関節部は、一方のアーム部材に形成した上下方向に貫通する軸支孔と、軸支孔に装着したベアリングと、他方のアーム部材に固定した、ベアリングに挿入される支軸とを備えるものにおいて、ベアリングでの発塵で生ずるパーティクルによる真空処理装置内の汚損を防止できるようにする。
【解決手段】一方のアーム部材311の下面に、軸支孔51を下方から覆うカバー7が着脱自在に取り付けられる。また、支軸53が他方のアーム部材321上方に突出する上部軸部53aを有し、一方のアーム部材311に、上部軸部53aが挿入される上部ベアリング55を装着した筒部54を設ける場合には、上部ベアリング55の内輪と他方のアーム部材321との間に介設するカラー57の下端に、外周に立上り部57bを有するフランジ部57aを形成する。
(もっと読む)
接合装置、接合システム、接合方法、プログラム及びコンピュータ記憶媒体
【課題】基板を押圧する際の荷重を適切に制御し、基板同士の接合を適切に行う。
【解決手段】接合装置は、下面に上ウェハWUを吸着保持する上部チャック230と、上部チャック230の下方に設けられ、上面に下ウェハWLを載置して吸着保持する下部チャック231と、を有している。上部チャック230には、上ウェハWUの中心部を押圧する押動部材250が設けられている。押動部材250は、上ウェハWUの中心部と当接して当該上ウェハWUの中心部にかかる荷重を制御するアクチュエータ部251と、アクチュエータ部251を鉛直方向に移動させるシリンダ部252とを有している。アクチュエータ部251には、当該アクチュエータ部251に対して所定の圧力の空気を供給する電空レギュレータが設けられている。
(もっと読む)
真空処理装置
【課題】設置面積を増大させることなく、処理能力を向上させることが可能な真空処理装置を提供する。
【解決手段】処理すべき基板Sに対し、真空雰囲気中で一貫して複数の処理を施す真空処理装置Mにおいて、相互に隔絶可能に連結された複数の処理室A乃至Eと、各処理室間に対して基板を搬入または搬出する搬送ロボット1と、少なくとも搬送ロボット1の作動を制御し得る制御ユニット7と、を備える。処理室A乃至Eのうち同一の処理を施す少なくとも2つの処理室C1、C2を、複数枚の基板を収容してこれら複数枚の基板に対して同時にストック処理を施すストック処理室とし、何れか一のストック処理室でストック処理を施す間、他のストック処理室に対しては基板の搬入又は搬出のみを行うように構成した。
(もっと読む)
真空処理装置
【課題】信頼性が高い真空処理装置を提供する。
【解決手段】真空搬送室内をウエハが搬送される第一及び第二の真空搬送容器と、これらの真空搬送容器各々に連結され処理室と前記真空搬送室とが連通された第一及び第二の真空処理容器と、前記第一及び第二の真空搬送容器の間で連結して内部に前記ウエハを収納可能な中間室容器と、前記第一の真空搬送容器に連結され内部が連通されたロック室と、前記第一及び第二の真空搬送容器と前記第一,第二の真空処理容器、前記中間室容器及び前記ロック室の各々との間に配置されて気密に開閉する複数のバルブとを備え、前記第一の真空処理容器の処理室と前記第一の真空搬送容器の真空搬送室との間または第二の真空処理容器の処理室と前記第二の真空搬送容器の真空搬送室との間のバルブを開放する前に前記第一及び第二の真空搬送容器の間に配置された前記バルブのいずれかを閉塞する。
(もっと読む)
局所クリーン化搬送装置
【課題】
ファンフィルタユニットの風量を上げることなくダウンフローの流れを維持し、異物の巻き上げ等を抑えて高い局所クリーン性能を発揮する局所クリーン化搬送装置の提供。
【解決手段】
基板搬送ロボット103は往復移動することができ、実線202の位置へ移動した場合、局所クリーン化搬送装置101の側面に設けられた開口量調節機構Aの開口量調節板402を作動して開口部402を開ことで、基板搬送ロボット103により押された空気が側面にぶつかって巻き上がらないようし、矢印403、404、405、406の様に外部へ排出する。
また、基板搬送ロボット103が遠ざかる場合は、開口部401が閉じ、外部からの空気の流入を防ぐ。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
基板搬送装置、電子デバイスの製造システムおよび電子デバイスの製造方法
【課題】位置決めの再現性、制御応答性及びサーボ剛性を向上できる基板搬送装置を実現する。
【解決手段】基板搬送装置は、基板を保持することが可能な基板保持器と、前記基板保持器を進退動作させるリンク部と、前記リンク部を動作させる駆動力を発生する駆動部と、前記基板保持器及び前記リンク部のいずれか一方に設けられたガイドバーと、前記基板保持器及び前記リンク部のいずれか他方に設けられ、前記リンク部の動作により前記基板保持器が移動する際に前記ガイドバーをスライド可能に支持する支持部と、を有する。
(もっと読む)
基板を処理するクラスタツールアーキテクチャ
【課題】システムスループットを増加させ、処理シーケンスCoOを低減する機器を提供する。
【解決手段】実施形態は、一般的に、スループットを増加させ、信頼性を増加させたマルチチャンバ処理システム(例えばクラスタツール)を使用して基板を処理する機器および方法を提供する。クラスタツール内で処理される基板は繰り返し可能性が高く、システムフットプリントが小さい。クラスタツールの一実施形態では、基板をまとめてグループ化して移送することで、基板を2枚以上のグループ毎に処理してシステムスループットを増加することにより、また、処理チャンバの間で基板のバッチを移送する際の動作数を低減することで、ロボットの疲労を低減し、システムの信頼性を増加させることにより所有権のコストが低減される。実施形態はまた、システムの停止時間を低減し、基板移送処理の信頼性を増加させるために使用される方法および機器を提供する。
(もっと読む)
搬送装置、基板処理システム及び姿勢制御機構
【課題】保持台の姿勢を正確に制御することができ、また高速で移動させても保持台がふらつくことがない搬送装置を提供する。
【解決手段】搬送装置に、第一の姿勢保持リンク56、及び第二の姿勢保持リンク57を設ける。第一の姿勢保持リンク56の一端と第二の姿勢保持リンク57の一端とは連結軸53によって回転可能に連結される。保持台21の基部プレート27にレール51,52を取り付ける。連結軸53にローラ54,55を所定の軸線の回りを回転可能に取り付ける。ローラ54,55はレール51,52のローラ転走部51a,52aに接触するように配置される。保持台21を移動させるとき、ローラ54,55がローラ転走部51a,52aを転がり運動する。
(もっと読む)
1 - 20 / 131
[ Back to top ]