
Fターム[5H571DD00]の内容
直流電動機の制御 (7,041) | 直流電動機の種類 (91)
Fターム[5H571DD00]の下位に属するFターム
Fターム[5H571DD00]に分類される特許
1 - 20 / 24
電動作業機
【課題】電源回路若しくはモータを的確に保護した電動作業機を提供する。
【解決手段】本発明に係る電動作業機が備える電源回路は、電源の出力電圧に応じて入力される入力電圧を変換して出力電圧を生成し、生成した前記出力電圧を前記モータに出力することを順次行う電圧変換手段と、電源回路の所定部分に流れる電流に応じて第1信号を出力する電流検出手段と、を備え、電圧変換手段は、前記電流検出手段が前記第1信号を出力すると、新たに生成する前記出力電圧の電圧値を下げる。
(もっと読む)
電動作業機

【課題】電源回路を的確に保護した電動作業機を提供する。
【解決手段】モータと、電池から供給される電力に基づいて前記モータを駆動する電源回路と、を備える電動作業機であって、電源回路は、電池の出力電圧に応じて入力される入力電圧を変換して出力電圧を生成し、生成した前記出力電圧をモータに出力することを順次行う電圧変換手段、を備え、電圧変換手段の出力電圧の電圧値を変更可能に設けた。また、電源回路は、電池の出力電圧に応じて第1信号を出力する電圧検出手段をさらに備え、電圧変換手段は、電圧検出手段が第1信号を出力すると、新たに生成する出力電圧の電圧値を下げる。
(もっと読む)
モータ制御装置
【課題】駆動対象の急加速を抑制する。
【解決手段】キャリッジを搬送するCRモータ51を制御するCRモータ制御部31は、速度制御器314の制御入力信号を補正する補正器315を備える。CRモータ制御部は、外乱オブザーバ317から出力される補正量d*の補正信号を、ゲインAの出力減衰器318に入力して補正量A・d*の補正信号に変換し、この補正信号と補償トルク生成器316から出力される補正量Cの補正信号とに基づき、速度制御器から入力される操作量u0の制御入力信号を、補正器で操作量uc=u0+A・d*+Cの制御入力信号に補正し、駆動回路53に入力する。この他、CRモータ制御部は、速度検出器311による速度計測値がゼロであるとき、ゲインAを0<A<1を満足する値に設定し、補償トルクCをゼロより大きい値に設定する一方、速度計測値がゼロ値を離脱すると、ゲインAを値1に設定し、補正量(補償トルク)Cをゼロに設定する。
(もっと読む)
モータの駆動回路および駆動方法ならびに冷却装置
【課題】モータを確実に、かつ簡易な制御で起動する。
【解決手段】モータ駆動回路100は、目標の回転数に応じてパルス幅変調された制御パルス信号CNT1を受け、ファンモータ4を駆動する。スタートパルス信号生成部16は、所定のデューティ比のスタートパルス信号SP1を発生する。駆動部10は、制御部14からの駆動パルス信号DRV1にもとづき、ファンモータ4をパルス幅変調により駆動する。制御部14は、ファンモータ4の停止状態において、制御パルス信号CNT1のデューティ比がゼロから非ゼロに遷移したことを契機としてファンモータ4の駆動を開始する。制御部14は、駆動開始からのあるスタート期間Ts中、スタートパルス信号SP1を駆動パルス信号DRV1として出力し、スタート期間Ts経過後に、制御パルス信号CNT1を駆動パルス信号DRV1として出力する。
(もっと読む)
ワイパ制御方法及びワイパ制御装置
【課題】払拭周期のバラツキを抑えつつ、反転時におけるブレードのオーバーランを制御する。
【解決手段】経過時間tとモータの目標回転数TRを取得し(S1,S2)、ブレード現在位置とモータの現在回転数を算出する(S3,S4)。ブレード現在状況を判断し(S5)、それに基づきモータ回転数を適宜補正する(S6〜S11)。まず、モータ回転数の補正値CNを算出し(S6)、補正値CNと目標回転数TRとから補正目標回転数CTRを設定する(S7)。また、補正加算上限値αを算出し(S8)、目標回転数TRにα値を加えて上限回転数ULRを算出して上限回転数ULRと補正目標回転数CTRを比較する(S9)。CTR>ULRの場合は、上限回転数ULRを最終目標回転数FTRとして設定し(S11)、モータ回転数の上昇を抑え、反転時のブレード速度を抑制する。
(もっと読む)
直流モータ制御装置及びその方法
【課題】本発明の目的は、ブラシやコミュテータが磨耗することなく、直流モータの回転速度及び方向をチェックすることのできる直流モータ制御装置及びその方法を提供することにある。
【解決手段】直流モータ制御装置及びその方法が開示される。本直流モータ制御装置は、前記直流モータに駆動電圧を印加し、直流モータから所定信号を検出する直流モータ駆動部と、直流モータ駆動部から検出された信号を用いて、直流モータの状態を制御するサーボマイコンと、を含む。これにより、直流モータの回転状態を確認して直流モータを制御することができるようになる。
(もっと読む)
車両用電動モータ駆動制御装置
【課題】車両用電動モータ駆動制御装置において、簡単な構造・小型・低コストでフライバックエネルギーを適切に分散及び吸収して、スイッチング素子が破壊されるのを抑制する。ひいては、駆動可能な時間を延ばすことができるようにする。
【解決手段】車両用電動モータ駆動制御装置は、直流電源BATと電動モータ30に直列に接続され、電動モータ30への給電・停止を切り替える第1スイッチング部74aと、第1スイッチング部74aのドレイン−ゲート間に配置されクランプ電圧を第1クランプ電圧と該第1クランプ電圧より大きい値である第2クランプ電圧とに切替可能な切替回路75とから構成される電動モータ駆動素子73と、電動モータ駆動素子73に並列に接続され、第1クランプ電圧と第2クランプ電圧との間の値である第3クランプ電圧にクランプするクランプ素子80と、を備えている。
(もっと読む)
モータ負荷制御装置
【課題】電子スイッチの発熱を抑制し、ファンの振動、及びファンの回転に伴う騒音の発生を抑制することが可能なモータ負荷制御装置を提供する。
【解決手段】第1の電子スイッチ(T1)と第2の電子スイッチ(T2)を並列接続したスイッチ手段17を備え、第1の電子スイッチ(T1)を所定の周波数、及び所定のデューティ比からなるPWM信号で駆動し、第2の電子スイッチを第1の電子スイッチ(T1)を駆動するPWM信号を所定時間だけ遅延して駆動する。これにより、各電子スイッチの発熱量を、電子スイッチが1個の場合と比較して低減することができ、装置全体の放熱対策を軽減することができる。更に、遅延時間をランダムに変化させることにより、PWM制御により発生する振動、騒音を低減することができる。
(もっと読む)
負荷駆動回路
【課題】本発明は、電子制御装置内に組み込まれる、診断回路を内蔵した負荷駆動回路において、電子制御装置に変更等の手を加えることなく、負荷駆動回路内の診断回路の動作確認を行うこと。
【解決手段】直流電源を電源としてソレノイド等の負荷を駆動する負荷駆動回路において、駆動回路と、該駆動回路内に独立して設けられた診断回路とを備えて、該駆動回路を制御する制御回路から駆動停止信号が入力されると、少なくとも該駆動回路が停止されることにより、電子制御装置に前記負荷駆動回路を組み込んだ状態のままで、前記負荷の状態を診断する前記診断回路の正常動作を確認すること。
(もっと読む)
モータ駆動装置及び画像形成装置
【課題】目標速度と実速度との誤差を抑制可能なモータ駆動装置を提供する。
【解決手段】本発明の印刷装置では、フィードバック制御方式により、キャリッジを駆動するモータに対する操作量uを決定する。また、操作量uに補正量cを加算し、補正後の操作量u’=u+cに対応した電流をモータに入力して、モータを駆動する。尚、補正量cは、補正データに基づき決定される。補正データは、N個の基本補正量D[i]からなり、本装置では、キャリッジが第i主補正位置P[i]を通過するとき、補正量をc=k・D[i]に決定して操作量u’を求める。また、本装置では、位置P[i]に対応する学習位置をキャリッジが通過するとき、キャリッジ速度と目標速度との誤差εが閾値Thより大きい場合、補正量D[i]を1小さい値に更新し、誤差εが閾値−Thよりも小さい場合、1大きい値に更新する。これより、誤差|ε|が小さくなる方向に補正データを更新する。
(もっと読む)
モータ制御装置、画像読取装置およびモータ制御方法
【課題】目標速度に対して実際の速度が大きい場合であっても、モータが逆回転することのないモータ制御装置、画像読取装置およびモータ制御方法を提供すること。
【解決手段】モータ11の回転速度を検出する回転速度検出手段(エンコーダ10、エンコーダ制御部31)と、回転速度検出手段(エンコーダ10、エンコーダ制御部31)により検出されたモータ11の回転速度とモータの目標回転速度との偏差に基づいてモータ11の制御量を求める制御量演算手段25bと、制御量演算手段25bにより求められた制御量に基づいてモータ11に対して電流を印加するかしないかを判断する通電判断手段25cとを備え、モータ11に対して逆回転駆動力を作用させる場合には、モータ11に対して電流を印加しない。
(もっと読む)
モータ制御装置、原稿読取装置およびモータ制御方法
【課題】誤った周期を用いてモータに印加される電力を算出することを防止可能なモータ制御装置、原稿読取装置およびモータ制御方法を提供すること。
【解決手段】被搬送物30を搬送する駆動力を与えるモータ50の回転に応じて出力されるパルス信号の所定のエッジ間の周期を計測する周期計測手段124と、エッジ間の計測周期に関する計測周期情報を一時記憶させる一時記憶手段125と、パルス信号に基づいて、モータ50が正転状態にあるか逆転状態にあるかを検出する回転方向検出手段127と、回転方向検出手段127でのモータ50の正転状態または逆転状態の検出に基づいて、一時記憶手段125に記憶されている計測周期情報の取得を許可または不許可とする情報管理手段126と、を具備する。
(もっと読む)
モータ制御装置、原稿読取装置およびモータ制御方法
【課題】モータを極低速で駆動させる場合でも、原稿読み取りのスループットの低下を防止可能なモータ制御装置、原稿読取装置およびモータ制御方法を提供すること。
【解決手段】モータ50の回転に基づいて、割り込み信号を出力する信号出力手段124と、モータ50に印加する電力を時間の経過に伴ってモータが回転しない電力の範囲から増大させる制御を行う電力加算制御手段112と、割り込み信号が入力されると共に、割り込み信号の入力の度に直前の割り込み信号との間の時間間隔に対応する計測値と規定の基準値とを比較し、比較の結果、計測周期が基準周期を超えているか否かを判断し、計測周期が基準周期を超えていないと判断される場合、モータ50に印加する電力を待機電力に低下させる指令を電力加算制御手段112に与え、判断手段111で計測周期が基準周期を超えていると判断される場合に電力の増大を継続させる判断手段111と、を具備する。
(もっと読む)
モータ制御装置、原稿読取装置およびモータ制御方法
【課題】非常に低速で回転させる場合のモータおよびモータにより駆動される機械的部分
の動作音が大きくならないようにすること。
【解決手段】ドライバ素子Q1〜Q4は、モータに駆動電圧を印加し駆動電流を供給し、
ゲート回路51は、指令値に応じた駆動電圧または駆動電流となるようにゲート信号をド
ライバ素子Q1〜Q4に供給する。制御部は、ゲート回路51に指令値を供給してモータ
を回転させ、所定の期間ごとにモータの回転量が所定の値になると、ゲート回路51を制
御して、モータを回生運転させた後にその所定の期間の終わりまで停止させる。
(もっと読む)
モータ制御装置、原稿読取装置およびモータ制御方法
【課題】モータが動き出すまでの間、無駄な待ち時間が生じずに、原稿読み取りスループットの向上可能なモータ制御装置、原稿読取装置およびモータ制御方法を提供すること。
【解決手段】モータ50の回転に応じて出力される出力信号を検出し、搬送量を計測する位置検出手段124と、一定の時間間隔毎にタイマ信号を発生させる計時手段106と、所定の時間間隔の経過が計測される場合、モータ50に印加する電力を待機電力から一定の加算値ずつ加算し、当該電力を増大させる制御を行う電力加算制御手段112と、出力信号が検出されない場合、計時手段106からのタイマ信号のカウントを開始する待ち時間計測手段111aと、待ち時間計測手段111aでカウントされるカウント数が、予め設定されている規定の待ち時間に到達するか否かを判断すると共に、カウント数が規定の待ち時間に到達する場合、加算値を増大させる加算値増大手段111と、を具備する。
(もっと読む)
モータ制御装置、原稿読取装置およびモータ制御方法
【課題】モータを電流制御して極低速回転させる場合において停止期間に完全にモータを
停止させること。
【解決手段】ドライバ素子Q1〜Q4は、モータに駆動電流を供給し、ゲート回路51は
、駆動電流の値が指令値に応じた電流値となるようにゲート信号をドライバ素子Q1〜Q
4に供給する。そして、電流調整部は、ゲート回路51に指令値を順次供給して、モータ
が回転しない第1の電流値範囲とモータが回転する第2の電流値範囲とに交互に電流値を
設定し、所定の期間においてモータの回転量が所定の値になると、ゲート回路51を制御
して、その所定の期間の終わりまでドライバ素子Q1〜Q4を継続的にオフさせる。
(もっと読む)
負荷駆動装置及びこれを用いた電気機器
【課題】本発明は、ノイズに起因する誤動作を回避して、定電流チョッピング制御の安定性を高めることが可能な負荷駆動装置を提供することを目的とする。
【解決手段】本発明に係る負荷駆動装置2は、インダクタンス成分を有する負荷(図1ではモータコイルL)に駆動電流Imを供給するドライバ23と、ドライバ23に流れるスイッチング電流に応じた検出電圧Vadjを生成する電流検出抵抗24と、検出電圧Vadjと所定のバイアス電圧(図1では接地電圧GND)のいずれか一を選択出力するスイッチ回路28と、スイッチ回路28の選択電圧Sbと所定の基準電圧Vrefとを比較するコンパレータ25と、コンパレータ25の比較出力信号Scに基づいてドライバ23の駆動制御信号(図1ではプリドライバ22のプリ駆動制御信号)を生成するロジック回路21とを有して成り、駆動電流Imの定電流チョッピング制御を行う構成とされている。
(もっと読む)
モータ制御装置
【課題】モータ不作動時に駆動回路における故障箇所の特定を簡易な構成によって行うことが可能なモータ制御装置を提供する。
【解決手段】車載バッテリ5からの電力供給によって作動するモータ20と、モータ20を駆動制御する制御手段3と、を備えたパワーウインドウ装置1であって、制御手段3は、駆動回路32と、駆動回路32の切換え制御を行う駆動回路制御部31aと、モータ20の回転状態を検出する回転状態検出部31bと、モータ20の各端子電位とグランド電位との間の中間電位Vadを検出する中間電位検出部31cと、回転状態検出手段31bによって検出された回転状態と中間電位検出部31cによって検出された中間電位Vadに基づいて、駆動回路32の異常を検出する異常検出部31dを備えた。
(もっと読む)
プリクラッシュシートベルト装置用の検出装置及び検出方法
【課題】プリクラッシュシートベルト装置のモータ給電路の電圧状態から、そのクラッチ解除残りの状態を断線と誤検出することなく、モータ給電路の断線を正確に検出する。
【解決手段】シートベルトを巻き取るときにスイッチング素子3がオンして電動モータ1の駆動電流が流れるモータ駆動回路2の2ブリッジ辺2a、2dの上流側の一方に第1の検出抵抗9xを並列に接続し、2ブリッジ辺2a、2dの下流側の他方に第2の検出抵抗9yを並列に接続し、モータ駆動回路2の全てのスイッチング素子3がオフする電動モータ1の給電停止状態での両検出抵抗9x、9yの給電配線側端部の電圧の大小関係から、給電配線81、82の断線を検出する。
(もっと読む)
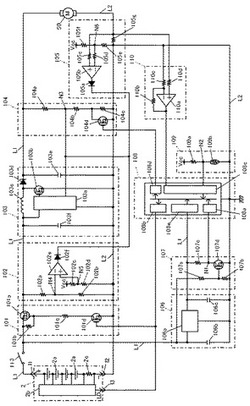
モータ駆動装置及びこれを用いた電気機器
【課題】本発明は、外部入力される制御電圧に応じてモータコイルの一端に印加する駆動電圧を容易かつ広範囲に可変制御することが可能なモータ駆動装置、及び、これを用いた電気機器を提供することを目的とする。
【解決手段】本発明に係るモータ駆動装置2は、モータコイルLに対してHブリッジ型に接続された4つのスイッチ素子(QH1、QH2、DL1、DL2)を有して成るHブリッジ回路21と;各スイッチ素子のオン/オフ制御を行う制御回路22と;電源電圧Vccと制御電圧Vrefとの比に応じたデューティのPWM信号を生成するPWM信号生成回路23と;を有して成り、制御回路22は、動作モード制御信号FIN、RINに応じてオンすべきスイッチ素子を選択するとともに、前記PWM信号に応じてそのオンデューティを制御する構成とされている。
(もっと読む)
1 - 20 / 24
[ Back to top ]