
Fターム[5H580FD18]の内容
ステッピングモータの制御 (5,935) | 停止 (201) | その他 (13)
Fターム[5H580FD18]に分類される特許
1 - 13 / 13
ステッピングモータの制御装置
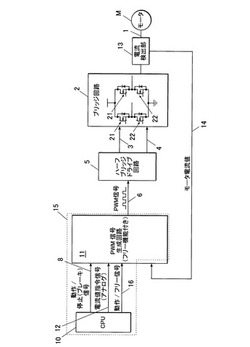
【課題】ハーフブリッジドライブ回路のPWM信号入力部に入力する信号を制御することによって、ステッピングモータを回転フリーの状態に制御できるステッピングモータの制御装置を提供する。
【解決手段】マイクロプロセッサ(CPU)10からフリー信号が信号線16を介してPWM信号生成回路11に入力されると、PWM信号生成回路11は、すべての相について、ハーフブリッジドライブ回路5のPWM信号入力部にPWM信号のONレベルに相当する制御信号を出力することにより、上段FET21をONに下段FET22をOFFにするとともに、当該制御信号の出力を維持することにより、ブートストラップコンデンサ53を放電させて上段FETをターンオフさせ、上下段FETがOFFにされてステッピングモータMが回転フリーの状態に制御する。その後回転駆動前に、PWM信号のOFFレベルに相当する制御信号を所定時間出力することで充電する。
(もっと読む)
遊技機

【課題】ステッピングモータの無負荷運転を早期に検出可能な遊技機を提供し、遊技機が発火するなどの異常の発生を防止すること。
【解決手段】パチンコ遊技機1は、装飾可動体42と、装飾可動体の駆動源たる第1ステッピングモータ63及び第2ステッピングモータ67と、両モータ63,67の駆動を制御する駆動制御手段(ランプ制御基板24、駆動回路96、駆動回路104により構成される)と、駆動制御手段から両モータへの通電波形を測定する測定手段(電圧測定部100,108、A/D変換部101,109、ランプ制御基板24により構成される)と、測定手段により測定された通電波形情報に基づいて、両モータの駆動状態を判定する判定手段(ランプ制御基板24により構成される)と、を備え、判定手段によりいずれかのモータが所定時間以上継続して無負荷運転していると判定されたとき、駆動制御手段は、両モータの駆動を停止させる。
(もっと読む)
ステッピングモータ制御回路及びアナログ電子時計
【課題】電圧検出回路を設けることなく電源電圧を検出すると共に、電源電圧が所定電圧以下に低下したとき正確な駆動パルスの情報を保有した状態で駆動停止できるようにする。
【解決手段】ステッピングモータ105の回転状況を検出する検出区間Tを複数の区間T1〜T3に区分し、各区間で検出される誘起信号VRsのパターンが、二次電池113が所定電圧以下に低下したことを表すパターンのとき、制御回路103は、最後に駆動した駆動パルスの極性を極性記憶部103aに記憶して、ステッピングモータ105の駆動を停止する。二次電池113の電圧が所定電圧以上に復帰したとき、極性記憶部103aに記憶した極性とは逆極性の主駆動パルスで駆動開始する。
(もっと読む)
ステッピングモータ駆動方法、ステッピングモータ駆動装置
【課題】スローアップの際に、脱調を生じさせずに、励磁方式を1−2相励磁方式から2相励磁方式へ相切り替えができるステッピングモータの駆動方法を提供することを目的とする。
【解決手段】ステッピングモータ駆動装置1が、1−2相励磁方式及び2相励磁方式の各々の励磁方式で励磁する複数の励磁コイル21,22と、1−2相励磁方式及び2相励磁方式の各々の励磁方式で複数の励磁コイル21,22が励磁されることにより、1−2相励磁方式及び2相励磁方式の各々で定められたステップ角を1単位として回転する回転子23と、を備えるステッピングモータ2を駆動させるステッピングモータ駆動方法であって、ステッピングモータ駆動装置1が、2相励磁方式で励磁コイル21,22を励磁して、回転子23の回転が停止している停止位置が、2相励磁方式で定められた停止位置となるように調整する回転子位置調整ステップを実行する。
(もっと読む)
ステッピングモータの駆動装置
【課題】マイクロプロセッサによるモータへの通電異常を検出する。
【解決手段】所定の励磁パターンに従って、各ステップに定められた電流値で各コイル94,95に通電が行われるように制御するステッピングモータの駆動装置10において、励磁パターンに従って各ステップを推移させるように指令出力を行うマイクロプロセッサ1と、指令出力に基づくステップに定められた電流値となるように各コイルへの通電を行う制御回路20と、各コイルの通電電流値を検出する電流検出手段11と、各検出電流値を合計し、その絶対値を求める加算手段71,72と、検出電流の合計の絶対値が所定値を超える場合に各コイルへの通電を絶つ電流停止手段74,75とを備えている。
(もっと読む)
ステッピングモータ制御装置およびステッピングモータの駆動制御方法
【課題】演算制御部からの目標角度信号の出力が、あらかじめ設定された送信周期よりも遅れてなされた場合の脱調防止を図ることができるステッピングモータ制御装置を提供すること。
【解決手段】モータ駆動制御回路2が、目標角度と現在の回動角度との差から、駆動軸3aを目標角度まで回動させるのに必要な目標回動角度を演算する目標回動角度演算処理、回動指示周期の範囲内に単位駆動周期ごとに駆動信号を設定回数出力して駆動軸3aを目標回動角度だけ回動させるのに必要な単位回動角度を演算する単位回動角度演算処理、駆動軸3aを単位回動角度回動させる駆動信号を、単位駆動周期で出力する駆動信号出力処理、回動指示周期の最後の駆動信号出力後に、次の目標角度信号が入力されない場合に、駆動軸3aを、減速させた後に停止させる減速停止処理、を実行するステッピングモータ制御装置とした。
(もっと読む)
電磁アクチュエータの制御方法
【課題】コイルへの通電によって発生する熱を利用した場合でも、複数のコイルで十分な熱を均等に発生させることのできる電磁アクチュエータの制御方法を提案すること。
【解決手段】ステッピングモータ1を制御するにあたって、駆動モードでは、2相励磁により、移動子3を駆動する。また、発熱モードでは、2相励磁のまま、励磁電流の周波数を、移動子3を駆動するのに必要な周波数より高くし、移動子3を移動許容範囲内の所定位置で停止させておく。従って、移動子3を停止させた状態のまま、2つのコイル12A、12Bで発熱させることができ、かかる熱を利用することができる。また、発熱モードでは、2相のコイル12A、12Bのいずれにも励磁電流が同等の実効値をもって供給されるため、2つのコイル12A、12Bで十分な熱を均等に発生させることができる。
(もっと読む)
ステッピングモータ駆動回路とその制御方法
【課題】マイクロステップ駆動において、電流低減制御を採用することができるようにする。
【解決手段】ステッピングモータ(M)の検出電流(io)に基づく検出電圧(Vs)が、基準電圧(Vo)に等しくなるように前記電流(io)を制御し、ドライブ状態では、前記電流(io)をドライブ電流として回転駆動させ、又はホールド状態では、前記電流(io)をドライブ電流より低いホールド電流として一定位置にロータを停止状態でホールドする駆動方法であって、(1)前記ステッピングモータ(M)がホールド状態からドライブ状態に移行する過渡状態の場合は、前記基準電圧(Vo)がホールド電圧からドライブ電圧に漸増するように制御し、又は、(2)前記ステッピングモータ(M)がドライブ状態からホールド状態に移行する過渡状態の場合は、基準電圧(Vo)がドライブ電圧からホールド電圧に漸減するように制御し、或いは(3)その両過渡状態において、該過渡状態に応じた制御がなされることを特徴とする。
(もっと読む)
モータ駆動装置、インクジェットプリンタおよびその給紙制御方法
【課題】駆動モータの温度を抑えながら、駆動モータを駆動すること。
【解決手段】モータ駆動装置1の駆動モータ15は、複数の動作モード毎に異なる電流制
御で駆動される。発熱量取得手段65は、所定の駆動がなされる期間の駆動モータ15の
駆動時間に基づいて、駆動モータ15の発熱量を得る。待ち時間決定手段65は、取得さ
れた発熱量から計算される駆動モータ15の累積蓄熱量に基づいて、駆動モータ15の駆
動を遅延させる待ち時間を決定する。駆動制御手段62は、待ち時間の後に、駆動モータ
15による新たな駆動を開始する。
(もっと読む)
画像形成装置に用いられる駆動装置
【課題】出力軸に連結された装置を所望の速度で駆動させると共に、正常なフィードバック制御を行う駆動装置の提供。
【解決手段】駆動装置1は、動力伝達ユニット、固定部材10及び制御部21を含む。動力伝達ユニットは、モータ回転軸3の外周面に圧接され弾性体からなる複数の遊星ローラ4、複数の遊星ローラ4と内周面で接し外周面上に突出した突出部6aを有するリング6、リング6を覆っており突出部6aが所定の距離を移動可能な幅を有する開口部9aが形成された固定体9、遊星ローラ4の回転に連動して回転するキャリアローラ7及びこの回転を外部に出力する出力軸8を備える。固定部材10は、突出部6aが開口部9a内を移動不能にリング6を固定する固定状態と、リング6の固定を解除する固定解除状態とをとり得る。制御部21は、画像形成処理の開始から終了までの間に、固定部材10が固定状態となるように固定部材10を制御する。
(もっと読む)
モータ制御装置
【課題】 駆動部をモータに接続されたギア部を用いて駆動するモータ制御装置の場合、モータの駆動方向が反転する際、ギア部に遊びがあるため、駆動部が実際に動作し始めるまでタイムラグが生じるという課題を有していた。
【解決手段】 モータ1の停止時に、ギア部2の遊び分だけ駆動方向と反対方向にモータ1を駆動させ、あらかじめギア部2の遊び分だけモータ1を反対方向に戻すことによって、モータ1の駆動方向が反転した場合、駆動部3により羽根が実際に動作し始めるまでのタイムラグを防止することができる。
(もっと読む)
ステップ・モータでの機能停止状態を検出する方法および装置
ロータ(12)上の複数の磁極(18,20)と相互作用を行う少なくとも第1および第2のコイル(A,B)を交互に駆動することにより、ステップ・モータのロータ(12)がステップ回転運動をする。各コイル(A,B)が駆動状態から非駆動状態に遷移すると、ロータの連続運動によりコイル(A,B)内に逆起電力が生成する。コイル(A,B)が生成した起電力は整流され、積分され、次にモータが機能停止状態にあるかどうかを判断するために、閾値と比較される。  (もっと読む)
(もっと読む)
過電流保護回路、モータドライブ回路および半導体装置
【課題】
電流値検出抵抗がショートした場合にパワートランジスタに過電流が流れるのを防止して、パワートランジスタの駆動動作を継続することができる信頼性の高いモータドライブ回路あるいは半導体装置を提供することにある。
【解決手段】
この発明は、電流出力のパワートランジスタと、第1の出力電流検出回路と、パワートランジスタの出力電流が規定値に達したときに出力電流検出回路から第1の検出信号に応じてパワートランジスタの出力電流を所定期間停止させることで出力電流を制限する電流制限回路とを備える半導体回路における過電流保護回路であって、パワートランジスタにカレントミラー接続された出力電流検出トランジスタと、出力電流が規定値を越えた所定値に達したときの出力電流検出トランジスタの出力電流に応じて第2の検出信号を発生する第2の出力電流検出回路とを有し、第2の検出信号に応じて電流制限回路を動作させてパワートランジスタの出力電流を所定期間停止させるものである。
(もっと読む)
1 - 13 / 13
[ Back to top ]