
国際特許分類[A01B69/02]の内容
生活必需品 (1,310,238) | 農業;林業;畜産;狩猟;捕獲;漁業 (84,932) | 農業または林業における土作業:農業機械または器具の部品,細部または附属具一般 (4,134) | 農業機械または器具の操向;要求された進路に沿っての,農業機械または器具の案内 (556) | マーカーまたはこれと類似の装置;正条うね用ワイヤ;そのための付属品 (92)
国際特許分類[A01B69/02]に分類される特許
1 - 10 / 92
苗移植機
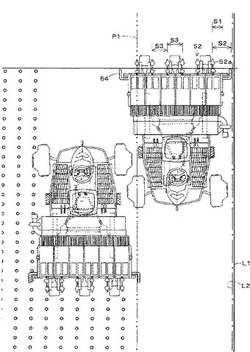
【課題】作業者が目視できない機体後方の苗植付装置とその近傍の情報を操縦席に着席したまま確認できるようにして、正しい圃場位置に苗を植え付けることができる構成を備えた苗移植機を提供すること。
【解決手段】苗を積載する複数条の苗タンク51に苗タンク51と走行車体2後方の情報を検出するCCDカメラ48と、該CCDカメラ48が検出した情報を表示する表示装置16を操縦部33に配置し、カメラ48が検出した情報から苗の植付条列や畦際を制御装置100で判断し、表示装置16に次の植付作業位置を示す第1植付仮想線P1及び圃場と畦際の境界線を示す第1畦際仮想線L1を出力することにより、走行車体2の後方の苗の植付状態や苗タンク51に積載した苗の状態を操縦部33から移動することなく確認することができ、苗の植付姿勢や植付深さの変更を速やかに行えるため、苗の植付姿勢が安定する。
(もっと読む)
田植機

【課題】左右のマーカを、苗植付け装置の横外側にはみ出さない格納姿勢と、左右のマーカが後車輪と接触することを避けながら苗植付け装置の下降位置で回り植え作業を行うことができる非作用姿勢とに安定的に維持できるようにする。
【解決手段】苗植付け装置側に、マーカ40を上昇非作用姿勢で下降側への揺動移動を機械的に阻止するように位置固定する左右一対の固定金具35を備え、固定金具35に、左右のマーカ40の全体が苗植付け装置の左右幅内に格納された状態となる格納位置cと、その格納位置cよりも横外方側で前記左右のマーカ40が左右の後車輪よりも左右方向での横外側に位置する非作用位置bとの、複数箇所で位置固定するための支持部37を設けてある。
(もっと読む)
水田作業機
【課題】センターマスコットをボンネットの前端付近から後方上方に延出された第1姿勢にした場合にセンターマスコットの基端部付近がボンネットの前端よりも前方に突出する傾向が少なく、搬送時などにもセンターマスコットに損傷を受け難い水田作業機を提供する。
【解決手段】機体1の前部に備えられたボンネット22と、ボンネット22の前端付近に配置された横向き軸心X2回りで、前端付近から後方上方に延出された第1姿勢と、少なくとも前端付近から上方に延出された第2姿勢との間で揺動操作可能なセンターマスコット32とを備え、ボンネット22の前端に、少なくとも第1姿勢におけるセンターマスコット32の基端付近を収納可能な凹部50を設けた。
(もっと読む)
苗移植機
【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
苗移植機
【課題】
畦際作業の際に、線引きマーカが一側に連続して作動し、畦や圃場に植え付けた苗に線引きマーカが接触することを防止可能な苗移植機を提供する。
【解決手段】
畦際での植付作業を検知する畦際検知部材76を設け、畦際検知部材76が畦際での植付作業を検知すると、苗植付部4を昇降させてもマーカ切替装置72の線引きマーカ68の作動方向を切り替えない構成とすると共に、畦際検知部材76が畦際での植付作業を検知すると線引きマーカ68の昇降回数を記憶する作動回数検知部材77を設け、作動回数検知部材77の検知回数が所定回数未満であるときは苗植付部4を昇降させてもマーカ切替装置72の作動方向を切り替えない構成とすると共に、作動回数検知部材77の検知回数が所定回数以上になると線引きマーカ68が圃場に線を形成しないようにマーカ切替装置72の作動を停止する構成とする。
(もっと読む)
水田作業機
【課題】水田作業機において、畦際での旋回終了を適切に検出する。
【解決手段】右の車輪2に動力を伝達する右のサイドクラッチ40と、左の車輪2に動力を伝達する左のサイドクラッチ40とを備える。操向操作自在な車輪1が直進位置A1側から右又は左の操向限度A3側に操向操作されると、右又は左のサイドクラッチ40が遮断状態に操作され、操向操作自在な車輪1が右又は左の操向限度A3側から直進位置A1側に操作されると、遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されるように構成する。車輪2の回転数に基づいて機体の前進及び後進の走行距離を検出する走行距離検出手段を備える。遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されたことと、走行距離検出手段で検出された機体の前進の走行距離と機体の後進の走行距離との差、とに基づいて旋回終了を検出する。
(もっと読む)
田植機
【課題】摺動板ガードに特に大きな外力が作用した場合には、摺動板の保護機能に優先して苗植付け装置の昇降操作機構が損傷することを回避できるようにする。
【解決手段】摺動板の左右方向での端部よりも外側に位置して、その摺動板に他物が衝突することを回避させるように保護するための摺動板ガード5を備え、摺動板ガード5に対して所定以上の外力が作用したときに、予め設定された特定位置で変形又は破断するように構成した脆弱部55を、摺動板ガード5に設けてある。
(もっと読む)
水田作業機
【課題】既植苗の存在箇所や既播種位置に近い側における整地用ロータの端部で、多量の泥押しや泥波が発生する可能性を低減させる。
【解決手段】左右方向での端部側に位置する端部ロータ部分53Bと、左右方向での中央側に位置する中央部ロータ部分53Aとを備えて構成された整地用ロータ53の端部ロータ部分53Bを、中央部ロータ部分53Aの駆動速度よりも低速での回転が可能な自由回転状態、または田面から離れた非整地状態に切換可能に構成してある。
(もっと読む)
植付作業機
【課題】マーカアームを上下揺動させるために支持部材に設けられた回動部材及び電装品を、カバー体によって覆って保護するにあたって、該カバー体の形状を簡素化できる植付作業機を提供することを課題としている。
【解決手段】マーカアーム36を支持部材41に支持し、マーカアーム36の下方揺動を規制する規制部43と、規制部43を回動部材43を介して上下回動作動させる電動アクチュエータ44と、回動部材46の回動位置を検出する検出センサ47とを備え、前記マーカアーム36を下方側に付勢する付勢部材42により、マーカアーム36を規制部43とともに上下揺動する植付作業機であって、マーカアーム36及び規制部43を支持部材41の前面側に配置するとともに、電動アクチュエータ44及び検出センサ47を含む電装品55並びに回動部材46を支持部材41の後面側に配置し、回動部材46及び電装品55を覆って保護するカバー体48を設けた。
(もっと読む)
田植機
【課題】旋回時自動昇降制御において苗の空植えを防止する。
【解決手段】田植機1は、上下に昇降可能な植付部3と、植付部3への駆動力を断接制御する植付クラッチ50と、車体旋回時に植付部3の昇降及び植付クラッチ50を制御する旋回時自動昇降制御を行う制御部と、を備える。旋回時自動昇降制御において、制御部は、旋回中又は旋回終了後の所定のタイミングで植付部3を自動的に下降させる。また制御部は、旋回終了後に、旋回開始前の植付中断位置に対応する植付再開位置まで車体が到達したときに植付クラッチ50を接続して植付を再開する。そして当該制御部は、植付部3を下降させるタイミングを、車体の走行速度に応じて変更する。
(もっと読む)
1 - 10 / 92
[ Back to top ]