
国際特許分類[A61F2/60]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 人工脚または足またはそれらの部品 (219)
国際特許分類[A61F2/60]の下位に属する分類
調節可能なもの,例.調節可能な脛,腿,または管状骨系 (41)
膝関節 (66)
足;くるぶし関節 (49)
国際特許分類[A61F2/60]に分類される特許
51 - 60 / 63
一体化された能動的および受動的義足システム、並びに、このようなシステムを動かすための方法
一体化された、能動的および受動的な義足システムおよび義足システム(1)によって歩行周期を実施するための方法であって、義足システムおよび/または方法(1)によって、歩行周期を実施するために個人の失われた足の代わりとなるためのものである。義足システム(1)は、少なくとも一つの可動関節部(2,3)と、切断可能であり、可動接続部を駆動するための能動的な駆動ユニット(4,4’)と、駆動ユニット(4,4’)が切断されるときに可動関節部(2,3)にブレーキをかけるための受動的なブレーキユニットとを有している。  (もっと読む)
(もっと読む)
3次元形状の計測装置およびその計測データによる義肢のソケット形状設計装置

【課題】
超音波により、人体の外部形状だけでなく骨,筋肉,脂肪形状等内部組織形状も併せて計測し,さらに、義肢使用時において断端部周辺に作用する荷重を考慮して、義肢使用者が快適に使用できるようなソケットを提供するための3次元形状測定装置、義肢用ソケット形状設計装置などを提供することである。
【解決手段】
本発明は、超音波の送出手段と、前記超音波の反射波の検出手段と、前記超音波の送出手段と前記反射波の検出手段の位置を決定する手段と、複数の材質から構成された検体の異なる材質間の境界を求めるために、検出されたデータを解析する手段と、解析された結果から有限要素モデルを作成する手段とを備えた3次元形状計測装置である。また、そのデータを使って義肢用ソケットを設計するための義肢用ソケット形状設計装置である。
(もっと読む)
幻肢痛を治療し義肢から被切断者に感覚フィードバックを与える電気刺激システム

【課題】切断手術を受けた者の幻肢痛を軽減し、切断手術を受けた者に義肢からの感覚フィードバックを与えるシステムに関し、幻肢痛を軽減し欠損した手足から失った感覚機能を取り戻すシステムを提供する。
【解決手段】該システムは埋め込み可能な多チャネルの多室性インターフェース構造、即ち神経カフ30を使用する。この埋め込まれた神経カフは、電極14を備える。電極14は信号発生器12から発生した信号を神経20に送信し、感覚信号を大脳皮質に送信するよう特定のニューロンの反応を増大させ、切断手術を受けた者に感覚を示す。このような信号は、正常に神経支配されている四肢の皮質に認識される信号の列に近似して直接信号発生器から発せられるか、或いは義肢のセンサ(50a〜c)から発せられる。
(もっと読む)
細菌汚染の防止用のモルホリノ化合物の使用
式Iの化合物:[式中、R1は、モルホリノ環の2位又は3位において8〜16個の炭素原子を含む直鎖又は分岐のアルキル基であり、そしてR2はα位以外において水酸基で置換される2〜10個の炭素原子を含む直鎖又は分岐アルキルであり、R1基及びR2基における炭素原子の合計が、少なくとも10であり、そして好ましくは10〜20である]は、表面上でバイオフィルムの形成を妨げるように使用される。当該化合物は、医療機器、例えばステント、カテーテル、及びワイヤーガイドを含む医療機器の被膜又は処理として特に有用である。  (もっと読む)
(もっと読む)
歩行装置
【課題】二足歩行用ロボットに使用される歩行装置であって、大きな負荷に耐え得るだけでなく安定した歩行動作を達成し得るように構成され、しかも設計上の自由度に優れた歩行装置を提供する。
【解決手段】歩行装置は足部10と、腰部12と、該足部及び腰部の間に設けられた脚部14とを具備する。脚部14は下腿部リンク機構16と、この下腿部リンク機構16に膝関節手段22A、22B、22C、22Dを介して接続された大腿部リンク機構18とから構成され、下腿部リンク機構18は足首関節手段20A、20B、20Cを介して足部に連結され、大腿部リンク機構18が股関節手段24A、24B、24Cを介して腰部12に連結される。腰部12には直線駆動手段26A、26Bと、回転駆動手段28が保持され、この駆動手段が足部を上下方向、前後方向及び左右方向のそれぞれに選択的に駆動させるべく大腿部側駆動リンク部材に組み込まれる。
(もっと読む)
義肢用の圧力/温度監視装置
中に残留手足を収容している義肢ソケットに関する様相を監視するための装置及び方法である。圧力と、力と、温度と、湿度と、真空とのうちの一つあるいは複数を測定するためのセンサと、センサの値を装着者へ表示し、センサの限界値を設定し、かつ/あるいはセンサの限界値を越えたときに可聴アラームを鳴らすための一つあるいは複数のデバイスを、この装置は有し、この方法は使用している。  (もっと読む)
(もっと読む)
複数の加圧チャンバを有する補綴ソケット直接注型装置
【課題】
【解決手段】 本発明の補綴ソケット注型装置は、前方側面を備えた基部を有し、この前方側面から、中央の注型領域を囲む膨張可能なブラダーが延びている。ブラダーは、ブラダーの内側でその長さにほぼ沿って延び、中央の注型領域を周方向に囲んでいる膨張可能な複数の内側チャンバを有する。これらチャンバの内壁は、柔軟で流体不浸透性の比較的薄いシート材料で形成されている。この材料は、チャンバの空間が加圧されると伸張可能である。ブラダーはまた、材料で形成された外側カバー、即ち、壁部か、ブラダーの外方への伸張を拘束する構造物かを有している。これらチャンバは、硬化可能な補綴ソケット材料が上に配置された義足が圧力下で注型および硬化されるように配置され得る中央の注型領域を圧迫するように、義足加圧された空気または他の流体を用いて膨張可能である。 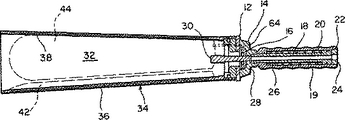 (もっと読む)
(もっと読む)
衝撃吸収及び制御回転を有する補綴デバイス用の真空ポンプ
義肢で使用される衝撃吸収及び制御回転を有する真空ポンプ(120)。このポンプは第1のチャンバを有するハウジング(220)と、第1のチャンバによって受容されてその中で往復動作を行うように形成されたシャフト(210)とを有する。ハウジングとシャフトとがポンプチャンバ(223)を形成する。ピストン(216)がシャフトへ連結されており、ポンプチャンバ内に配置されている。インテークポート(225)及びエキゾーストポート(226)がポンプチャンバへ流体連結されている。ハウジングに対するシャフトの回転を制御するために、ポンプに対して回転構造(230−234)が取り付けられている。シャフトに対する衝撃を吸収するために、衝撃吸収構造がポンプ内に設けられている。この衝撃吸収構造には、空気圧スプリング(260)及び機械式スプリング部材(250)の両方が設けられている。場合によっては、アダプタ(212)が一体状のパイロン人工フットのパイロンへシャフトを連結している。  (もっと読む)
(もっと読む)
動作制御式足ユニットのためのシステム及び方法
肢の動きに関連するシステム及び方法。一例では、補装具システム又は矯正具システムのようなシステムは、足ユニットと下肢部材との間の角度を積極的に制御又は調節するアクチュエータを備える。処理モジュールは、センサモジュールから得たデータをもとにアクチュエータの動きを制御する。例えば、検出するモジュールのデータは、使用者の歩行に関連する情報を含み、健常な足首の自然な動きを実質的にまねるように足ユニットを調節するために使用される。さらに、このシステムは、例えば、平地での歩行、階段の上下歩行、傾斜面の上下歩行や使用者の他の種々の動きに対応できる。更に、処理モジュールは、使用者による入力信号を受信したり外部インターフェースにより出力信号を表示してもよい。例えば、処理モジュールは、その使用者による踵の高さの入力を受信してもよい。  (もっと読む)
(もっと読む)
器械化義足
【課題】 本発明は、コントローラにより制御された義肢(14)の作動と共に使用される器械化義足(20)を提供する。
【解決手段】 この器械化義足(20)は、義肢(14)に器械化義足(20)を接続するためのコネクターと、このコネクターに接続された足首(足関節)構造と、この足首構造に接続された地面係合部材と、足に沿う重量分布の変化を検出するための少なくとも1つのセンサー(22a,22b,24a,24b,26)と、このセンサーから前記コントローラへ信号を伝達するためのインターフェースとを具備してなることを特徴とする。
 (もっと読む)
(もっと読む)
51 - 60 / 63
[ Back to top ]