
国際特許分類[A61F2/60]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 血管へ埋め込み可能なフィルター;補綴;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント;整形外科用具,看護用具または避妊用具;温湿布;目または耳の治療または保護;包帯;被覆用品または吸収性パッド;救急箱 (33,358) | 血管への植え込み可能なフィルター;補綴,すなわち,身体の各部分のための人工的代用品または代替物;身体とそれらを結合するための器具;人体の管状構造を開存させるまたは虚脱を防ぐ装置,例.ステント (9,831) | 身体内へ植込まない人工器官 (599) | 人工脚または足またはそれらの部品 (219)
国際特許分類[A61F2/60]の下位に属する分類
調節可能なもの,例.調節可能な脛,腿,または管状骨系 (41)
膝関節 (66)
足;くるぶし関節 (49)
国際特許分類[A61F2/60]に分類される特許
11 - 20 / 63
競技用義肢
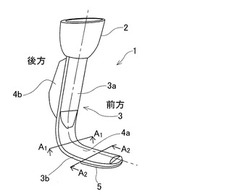
【課題】空気抵抗や渦損を少なくして早く走ることができる競技用義肢を提供すること。
【解決手段】断端部が挿入されるソケット2とソケット2から下方に延びる下腿部3aと足部3bとを構成する前方に湾曲した板バネ3を有し、板バネ3の前面及び或いは後面に空気抵抗を抑制する空気抵抗抑制部材4a、4bを備えることを特徴とする競技用義肢。
(もっと読む)
義肢及び義肢用ライナー

【課題】容易な装着作業を通じて手足の断端部に義肢を装着することができるとともに、簡易な構成をもってその正常な装着状態を維持することのできる義肢を提供する。
【解決手段】義足1は、足の断端部Sが挿嵌可能な挿嵌部4を有したソケット3を備える。また、ソケット3の内側面には、ソケット3の挿嵌部4に断端部Sを挿入する方向Bに傾斜する繊維状部材41が設けられる。
(もっと読む)
矯正用または補装用の人工の膝関節を制御するための方法および装置
本発明は、抵抗手段を有する、下肢の矯正用または補装用の人工の関節を、制御するための方法であって、該抵抗手段に関連して、センサデータに従って屈曲抵抗および/または伸展抵抗を変化させる少なくとも1つのアクチュエータが設けられており、関節の使用の最中に、センサによって状態情報が提供されてなる方法と、該方法を実施するための装置とに関する。下腿部分の、垂直線の方向に減少する慣性角度と、同時に負荷された前足とが決定されるとき、屈曲抵抗が、立脚期において増加または減少されないことが意図されている。 (もっと読む)
補てつ肢又は装具用の取り換え可能なフェアリング
フェアリングは補てつ肢又は装具の外観を変えるため補てつ肢又は装具上に取り付けられる。補てつ肢の外面は完全な肢のミラー画像であってもよく、該装具の外面は負傷肢に対応する外面を有してもよい。フェアリングは補てつ肢又は装具の周りに密接に適合するので、該フェアリングの内面は完全な肢のミラー画像又は負傷した肢の外面に対応する表面を有する。 (もっと読む)
装着型筋力補助装置
【課題】構造が簡単でかつ軽量であり安価に製造することができる装着型筋力補助装置を提供する。
【解決手段】装着型筋力補助装置は、人体に装着して固定される外骨格部を備えており、この外骨格部は、人体の複数の骨位置と対応する位置にそれぞれ配置される複数の骨部材と、人体の複数の関節位置と対応する位置にそれぞれ配置されており、各々が複数の骨部材のうちの2つを連結する複数の第1の回動ジョイント部材とを備えている。複数の第1の回動ジョイント部材の各々は、連結された2つの骨部材を回動自在に支承する支点と、2つの骨部材間の角度が減少する際に弾性エネルギを保存し、その角度が増大する際に弾性エネルギを放出するばね部材とを備えている。
(もっと読む)
装着式動作補助装置及びその制御方法
【課題】本発明は生体信号の検出感度に応じたパラメータに補正することを課題とする。
【解決手段】動作補助装置10のキャリブレーション制御手段162は、装着者12が動作補助装着具を装着したときに、負荷発生手段164により電力増幅手段158に対して駆動源140からの駆動力を負荷(入力トルク)として装着者12に付与させる。そして、駆動源140からの駆動力を付与された装着者12は、予め決められた所定キャリブレーション動作を行って骨格筋から力を発生させる。これにより、上記キャリブレーション動作に伴って物理現象検出手段142が関節角度を検出し、生体信号検出手段144が筋電位信号を検出する。パラメータ補正手段156では、フェーズ特定手段152によって特定されたフェーズにおける差分導出手段154によって算出された負荷(入力トルク)と駆動力(筋力)との差に基づいてパラメータKを補正する。
(もっと読む)
装着補助具
【課題】本発明は、装着式動作補助装置の駆動部からの補助動力が装着者に締結される締結部材を介して伝達される際に締結部材が装着者の服に対して滑ることを防止することを課題とする。
【解決手段】装着補助具200は、密着層210と、弾性層220と、動力伝達層230と、摩擦層240とを一体的に積層したものである。各層間は、縫合または接着または溶着などの接合方法を用いて結合される。弾性層220は、密着層210を装着者の被駆動部位に締付けると共に、装着式動作補助装置の補助動力が増大した場合には密着層210と動力伝達層230との間の補助動力の伝達を緩衝するように弾性変形する。これにより、装着式動作補助装置の補助動力(モータトルク)が過大になった場合には、弾性層220の緩衝により装着者12が被着した服の表面に対して密着層210が滑らないように伝達トルクが緩和される。
(もっと読む)
動作補助装置、及び該動作補助装置を管理する情報管理装置
【課題】動作補助装置の使用状況を効率よく管理し、最適な状態を維持する。
【解決手段】動作補助装置において、装着者の関節の角度を検出する第1の検出手段と、装着者の筋活動に伴う生体信号を検出する第2の検出手段と、駆動源の駆動トルクを検出する第3の検出手段と、基準パラメータデータベース、指令信号データベース、及び前記第1から第3の検出手段の検出信号からなる動作履歴情報が格納される格納手段と、前記動作履歴情報を管理者側に送信し、前記管理者側からの前記基準パラメータ及び/又は指令信号を受信する通信手段と、前記更新情報の該当するフェーズに対応させて更新情報を格納する更新制御手段と、関節角度信号と、基準パラメータとを比較することにより、前記装着者の動作のフェーズを推定し、推定されたフェーズに対応する指令信号に基づいて、前記駆動源を駆動する制御手段を備えることにより、上記課題を解決する。
(もっと読む)
動力義肢の制御方法、及び当該方法が適用された動力義肢
【課題】患肢に装着した動力義肢において、従来は不可能であった巧緻な随意的運動を実現可能とする動力義肢の制御方法及びこれを適用した動力義肢を提供する。
【解決手段】上肢若しくは下肢の一部若しくは全部を欠損した患肢Aと、随意的に動かし得る関節Hとを有する人体に適用される動力義肢1を制御するための方法であって、随意的に動かし得る関節の一又は複数の関節変位を、計測手段3により第1の関節変位として計測するステップと、第1の関節変位の一般化座標空間から動力義肢1の関節変位の一般化座標空間への適切な写像を演算手段5により演算し、第2の関節変位として算出するステップと、第2の関節変位を目標値として、制御手段4、10、20により患肢に適用した動力義肢の一又は複数の関節変位制御を行なうステップと、からなることを特徴とする動力義肢の制御方法及びこれを適用した動力義肢とする。
(もっと読む)
歩行訓練システム
【課題】堅実なフェイルセーフを備えており、ユーザがバランスを崩したときにすばやく停止する歩行訓練システムを提供する。
【解決手段】歩行訓練システム100は、ユーザの脚に装着され、脚の関節にトルクを加えるアクチュエータを有している脚装具12と、手摺50を備える。手摺50には、ユーザから受ける荷重を検出する荷重センサ52が配置されている。歩行訓練システム100は、荷重センサ52が検出した荷重が閾値を超えた場合に、歩行動作に応じた脚装具の制御を停止する。
(もっと読む)
11 - 20 / 63
[ Back to top ]