
国際特許分類[A61H1/02]の内容
生活必需品 (1,310,238) | 医学または獣医学;衛生学 (978,171) | 物理的な治療装置,例.人体のつぼの位置を検出または刺激する装置;人工呼吸;マッサージ;特別な治療または人体の特定の部分のための入浴装置 (8,757) | 受動的な身体訓練のための装置;バイブレーション装置;カイロプラクティク器具,例.身体に衝撃を与える器具,折れていない骨を短時間引き伸ばしまたは整復させる外部器具 (893) | 運動のための伸長または屈曲装置 (743)
国際特許分類[A61H1/02]に分類される特許
1 - 10 / 743
頸部運動用補助具
Notice: Undefined index: from_cache in /mnt/www/gzt_ipc_list.php on line 285
リハビリテーション支援装置
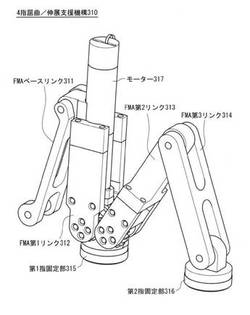
【課題】急性期患者の手指の運動機能の回復訓練に適したリハビリテーション支援装置をより低価格で提供する。
【解決手段】FMAベースリンク311と、そのFMAベースリンク311に基端が、指の第三指節に固定される第1指固定部315に先端がそれぞれ回動可能に連結されたFMA第1リンク312と、第1指固定部315にその基端が回動可能に連結されたFMA第2リンク313と、そのFMA第2リンク313の先端に基端が、指の第二指節に固定される第2指固定部316に先端がそれぞれ回動可能に連結されたFMA第3リンク314との4つのリンクからなるリンク機構、及びFMA第1リンク312及びFMA第2リンク313を第1指固定部315に対してそれぞれ回動させるモーター317により、患者の指の屈曲/伸展運動を支援する4指屈曲/伸展支援機構310を構成した。
(もっと読む)
歩行訓練装置

【課題】本発明は、歩行訓練を行なう際の座位または立位の姿勢に応じて安定した補助を行えることを課題とする。
【解決手段】歩行訓練装置10は、把持部20と、複数の支持脚30A〜30Dと、車輪40と、高さ調整機構50A〜50Dと、一対の操作部60A,60Bとを有する。操作部60A,60Bは、上下方向に操作される操作レバー62と、操作レバー62を回動可能に支持するブラケット64と、操作レバー62の回動変位に応じた変位量を高さ調整機構50A〜50Dに伝達する伝達部材66とを有する。高さ調整機構50A〜50Dは、操作部60A,60Bが同時に操作されることにより歩行訓練者が座位状態から立上がる訓練を行なう際には、把持部20の高さ位置を座位状態で把持しやすい高さ位置に降下させ、また歩行訓練者が立位状態で歩行訓練する際には把持部20の高さ位置を立位状態で把持しやすい高さ位置に上昇させることができる。
(もっと読む)
磁気刺激リハビリテーション装置
【課題】麻痺により随意運動が困難な筋肉あるいは関節を、本人の意思と努力によってわずかでも動かし、その際に生じる動きの、部位、方向および強さをセンサで検出する。センサ信号のレベルに応じたパルス磁場を発生して、磁気刺激による大きな筋収縮を生じさせ、筋肉の動きを増強する。脳の可塑性を活用して神経ネットワークを構築し、リハビリテーションを効果的に行う技術を提供する。
【解決手段】自発運動によって筋肉若しくは関節に生じる変位を、光学センサ、あるいは超音波センサ、あるいは磁気センサによって検出し、この部位、方向および強さに対応するセンサ出力電位をトリガ信号として用いる。パルス電源に接続した一個または複数個の磁気刺激コイルに、トリガ信号レベルに対応する強度、回数の磁気パルスを発生させる。この磁気パルスによって大脳の運動野又は筋肉を磁気刺激することにより麻痺した筋肉の動きを増強する。
(もっと読む)
脳機能亢進支援装置および脳機能亢進支援方法
【課題】神経活動のデコーディング方法を使用した訓練装置を提供する。
【解決手段】訓練装置1000は、被験者の脳内の所定の領域における脳活動を検出するための脳活動検出装置108と、演算処理装置102と、被験者にニューロフィードバック情報(呈示情報)を提示するための出力装置130とを備える。演算処理装置102は、脳神経の活性化のパターンをデコードして、訓練対象となっている事象に対して事前に取得されている目標活性化のパターンに対する近似度を算出し、算出された近似度に基づいて、報酬値を算出し、報酬値に対応する呈示情報を生成する。
(もっと読む)
アシストロボット制御装置
【課題】使用者のリハビリまたは力増幅の用途において、必要な部位に必要なだけアシストトルクを与える。
【解決手段】アシストロボット制御装置120は、状態検出値に基づいて推定器ゲインを推定する推定器ゲイン演算器121と、状態検出値と推定器ゲインに基づいて状態推定誤差を算出する状態推定誤差演算器122と、状態推定誤差に基づいて使用者トルク推定値を算出する使用者トルク推定器123と、使用者トルク推定値に基づいて動作補助またはリハビリ治療に必要なアシストトルクを算出し、関節モータがアシストトルクを発生するようなモータ電流を出力するアシストトルク演算器124と、を備える。
(もっと読む)
内臓運動兼腰運動器
【課題】腰運動を必要とする人が、容易に腰運動と共に内臓運動を行うことができる器具を提供する。
【解決手段】運動器本体内の第2回動軸12に近接して設置され、回転板21が取り付けられた第1駆動モーター2と、第1回動アーム4に固定された第1回動レバー3と、第1回動軸11に固定された第1回動アームと、水平に延長された第2回動アームと、第2回動軸から水平に延長されて固定された第3回動アーム6にヒンジされて第2回動軸上に固定された第2回動レバー7と、第1および第2回動軸の上部に設置され、内部に温熱マットが設置された回動板部8と、回動板部同士の間に設置され、第3駆動モーターによって垂直に移動可能に設置された腰支持部10と、回動板部の温熱マットの温度と回動板部の回動速度、時間および回動角度を調節する制御部9とを含んでなる。
(もっと読む)
足関節駆動による歩行支援機能的電気刺激システム
【課題】より自然な歩行に近づけることを可能にする機能的電気刺激システムを提供する。
【解決手段】歩行支援のための機能的電気刺激システムであって、足関節周囲筋群の複数の各筋を個別に電気刺激して足関節駆動力を付与する駆動力付与装置と、下肢に装着して電気刺激を行う刺激電極サポータ1,5と、脚接地を検出するセンサー3,4と関節角度を検出するセンサー7,8,12,13を備えており、受動歩行様式の骨格モデル及び筋骨格数学モデルによりオンラインで筋出力を推定し、推定した筋出力を各筋に対応した刺激パターンに変換し、刺激電極サポータにより、各筋に対応した刺激パターンで各筋を個別に電気刺激する。
(もっと読む)
歩行訓練装置及びそれに用いられる靴
【課題】3ステップ歩行の歩行訓練に適した歩行訓練装置を提供することである。
【解決手段】靴100の踵荷重部位E1に設けられ、加わる圧力を検出する第1圧力検出部11aと、靴100の親指荷重部位E2に設けられ、加わる圧力を検出する第2圧力検出部11bと、第1圧力検出部11aでの圧力検出タイミングに同期して第1圧力応答信号を出力し、第2圧力検出部11bでの圧力検出タイミングに同期して第2圧力応答信号を出力する信号出力部13とを有する第1ユニット10と、信号出力部13から出力される前記第1圧力応答信号及び前記第2圧力応答信号を入力する信号入力部21と、信号入力部21での前記第1圧力応答信号と前記第2圧力応答信号との入力タイミングに同期して人の感覚にて認識可能な有感信号を発する有感信号発生部22、23、24とを有する第2ユニット20とを備えた構成となる。
(もっと読む)
動作訓練装置、動作訓練システム
【課題】被訓練者が指導を受けたときの姿勢や動作と、被訓練者が自己訓練を行っているときの姿勢や動作との差異を被訓練者に知らせることにより訓練効果を高める。
【解決手段】被訓練者が左右の足を載せる左足置部121および右足置部122が設けられ、左足置部121および右足置部122にそれぞれ作用する荷重を複数箇所で検出する荷重検出部131,132が設けられる。荷重情報抽出部201は、荷重検出部131,132が検出した荷重から被訓練者の姿勢と動作とに相当する現荷重情報を抽出する。情報評価部202は、荷重情報抽出部201が抽出した現荷重情報と目標設定部203にあらかじめ設定された目標荷重情報との差異を評価する評価量を算出する。算出された評価量は、提示部3を通して表示装置51に表示され被訓練者に示される。
(もっと読む)
1 - 10 / 743
[ Back to top ]