
国際特許分類[G05B19/414]の内容
物理学 (1,541,580) | 制御;調整 (21,505) | 制御系または調整系一般;このような系の機能要素;このような系または要素の監視または試験装置 (12,533) | プログラム制御系 (7,632) | 電気式 (7,631) | 数値制御 (2,851) | 制御系の構成,例.共有コントローラまたはマルチプロセッサシステム,サーボのためのインターフェイス,プログラマブルインターフェイスコントローラ (203)
国際特許分類[G05B19/414]に分類される特許
1 - 10 / 203
操作装置および可動機械制御システム
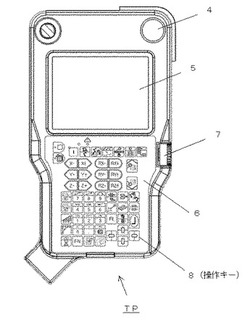
【課題】操作装置に配置されたキーの名称を各言語に対応させる場合は、各言語に応じたキーシート等を在庫として用意しておき、出荷国に応じた貼付作業を行う必要があるために、その分の管理コストや製造工数を必要とする。
【解決手段】操作装置TPは、制御対象を操作するための複数の操作キー8がレイアウトされた操作部6と、操作キーの入力に応じた画面が表示される表示部5とを有している。操作部6には操作キーの名称が印字されていない。操作装置TPの本体または接続先のコントローラは、操作キーの名称をガイドするためのガイド情報を記憶する記憶手段を備える。そして、所定の操作が行われると、操作キーの名称および画像が各言語に応じて表示部5に表示される。本発明により各国に応じた作業が不要になるというメリットがあると同時に、作業者は、これまでと同様に操作キーの名称を容易に知ることができる。
(もっと読む)
通信システム、制御装置、通信装置、制御方法、通信方法、及びプログラム

【課題】 伝送遅延を考慮するのみでは、フィードバック制御を行う周期を最速化することが困難であった。
【解決手段】 制御装置は、通信を介して所定の動作を実行する複数の駆動装置を制御する制御装置であって、複数の駆動装置のそれぞれが信号を受信して当該信号に応じて動作を実行できる状態となるまでの駆動準備時間と、複数の駆動装置のそれぞれと制御装置との信号の伝送に要する伝送遅延とを取得し、駆動準備時間と伝送遅延とに基づいて、複数の駆動装置を制御するための信号を当該複数の駆動装置へ送信する順序を決定し、決定した順序に基づいて、複数の駆動装置へ信号を送信する。
(もっと読む)
マルチコアプロセッサを有する数値制御装置システム
【課題】マルチコアプロセッサの技術を利用して、コストを抑えつつ多軸化や高機能化が可能な数値制御装置システムを提供すること。
【解決手段】モータ駆動用アンプと数値制御装置とが通信で接続されて数値制御システムを構成する。その数値制御装置1は、数値制御部10と、モータ制御部40と、アンプインタフェース部30とを備える。さらに、そのモータ制御部40が有するモータ制御用プロセッサは、マルチコアプロセッサとする。
(もっと読む)
学習制御機能を備えたロボット
【課題】従来、学習制御器の調整は経験に基づいて試行錯誤で行われており、調整が難しいという問題があった。
【解決手段】本発明のロボットは、位置制御の対象とする部位にセンサを備えたロボット機構部(1)と、ロボット機構部の動作を制御する制御装置(2)とを含み、制御装置(2)は、ロボット機構部の動作を制御する通常制御部(4)と、作業プログラムに指定された教示速度に、速度変化比を乗算した速度指令にてロボット機構部(1)を動作させたときに、センサにより検出された結果から、ロボット機構部の制御対象の軌跡又は位置を目標軌跡又は目標位置に近づけるため、もしくは制御対象の振動を抑制するための学習補正量を算出する学習を行う学習制御部(3)と、を有し、ロボット機構部の制御対象位置が速度変化比に依らず一定の軌跡を移動するように処理を行うことを特徴とする。
(もっと読む)
ブロック実行順表示装置
【課題】シーケンスプログラムおよびNCプログラムからなる制御プログラムの全体を構造的かつ視覚的に表現し、制御プログラムの実行順序および実行状態を容易に把握することができるブロック実行順表示装置を提供する。
【解決手段】数値制御およびシーケンス制御を備えた生産装置50と、シーケンスプログラム13aを実行するプログラマブルコントローラ10と、NCプログラム23aを実行する数値制御装置20と、シーケンス機能ブロックおよびNCプログラム実行ブロックを実行順に配列したブロック実行順配列を表示するブロック実行順配列表示手段116aと、配列要素の一つを選択する選択手段と、選択手段によってNCプログラム実行ブロックが選択されると、複数のNC機能ブロックを実行順に配列したNC機能ブロック実行順配列を表示するNC機能ブロック実行順配列表示手段116cを備える。
(もっと読む)
シリアル通信装置
【課題】通信データの衝突を回避できるシリアル通信装置を得る。
【解決手段】実施形態のシリアル通信装置42は、他のモータ駆動制御手段に接続された入力ライン33とマスタ制御手段へ制御情報を通知するための出力ライン34を介して制御情報の同期通信を行うモータ駆動制御手段が備えるシリアル通信装置であって、入力ラインからの受信データを受信する受信手段51と、受信手段が受信した受信データを一時的に記憶する退避バッファ52と、モータ駆動制御手段が制御するモータからの送信データを記憶する送信バッファ57と、出力ラインにデータを送信する送信手段53と、通信周期内の所定の送信タイミングであるか否かを判定する送信タイミング判定手段54と、送信タイミング判定手段の判定結果および送信手段がデータ送信中であるか否かに基づいて、送信手段から受信データまたは送信データのいずれを送信するか制御する送信制御手段55を備える。
(もっと読む)
ロボット制御システム
【課題】複数の可搬式操作装置を1台のロボット制御装置に同時接続した場合、教示機能が有効な可搬式操作装置を識別できない。
【解決手段】ロボット制御システム1は、ロボットRと、教示操作信号を送信する可搬式操作装置TPと、教示操作信号を受信してロボットRへの教示作業を行う教示機能を有する制御装置RCにより構成される。制御装置RCは、可搬式操作装置TPとの無線通信を確立する際に、可搬式操作装置TP毎に教示機能を有効化又は無効化する通信確立手段を備える。可搬式操作装置TPは、無線通信の確立状態を示す通信状態表示灯3と、教示機能の有効/無効を示す非常停止スイッチ4とを備える。通信確立の際に、現在の接続数が0の時に前記教示機能を有効化し、1以上の時は無効化したモニタモードを選択する。可搬式操作装置TPの接続形態が表示されるので教示に使用できる装置を容易に判別できる。
(もっと読む)
位置測定システムと処理ユニットとの間でシリアルデータ伝送するための方法及び装置
【課題】処理ユニットとエンコーダとの間のその他のデータの中断しない交換を可能にする。
【解決手段】位置データ及びその他のデータが、エンコーダから処理ユニットに伝送され、当該伝達されるデータは、時間的に急ぐデータ及び命令と時間的に急がないデータ及び命令とに分割され、位置データ及び位置要求命令が、時間的に急ぐデータを示し、追加データ及び追加データ命令が、時間的に急がないその他のデータを示し、位置データを要求するため、時間的に急ぐ位置要求命令が、処理ユニットからエンコーダに伝送され、時間的に急ぐ位置要求命令に続くその他のデータが、処理ユニットからエンコーダに伝送され、その他のデータの処理は、時間的に急がないものであり、当該つながっている時間的に急がないデータは、時間的につながっていない、所定の間隔をあけて前後して続く複数の追加データブロックによって時間分割して伝送されることによって解決される。
(もっと読む)
ロボット制御装置
【課題】多関節ロボット本体の制御において、軌道計算が複雑で計算の所要時間が不定であっても、複雑な軌道計算と、同期動作とを並行して実行する必要がある。
【解決手段】ロボット制御装置200は、共有メモリ203と、共有メモリ203にアクセス可能に接続された第1の処理部201及び第2の処理部202と、を備えている。第1の処理部201は、多関節ロボット本体を目標位置姿勢に動作させるコマンドから各アーム用モータに出力する指令値の連なりを示す動作指令データBを計算し、計算結果である動作指令データBを共有メモリ203に格納する軌道計算処理を行う。第2の処理部202は、共有メモリ203に格納された動作指令データBを取得して、指令値を各アーム用モータに一定の時間間隔で同期して出力する同期処理を行う。
(もっと読む)
遠隔操作装置及び工作機械
【課題】操作パネルの操作スイッチの状態と工作機械の内部情報を一致させることが可能な遠隔操作装置を提供する。
【解決手段】工作機械1を操作する操作スイッチを有する操作パネル4に着脱可能であって、工作機械1とは遠隔地に配置された別体のパソコン30からの操作指示により操作スイッチを遠隔操作する遠隔操作装置20において、操作パネル4の操作面に装着するパネル装着部21と、操作スイッチを操作する操作部23と、操作部23を操作パネル4に対向して移動する送りユニット22と、操作指示に基づき、操作部23及び送りユニット22を制御する制御部25と、を備え、パネル装着部21に、操作部23、送りユニット22、及び制御部25を設けた。
(もっと読む)
1 - 10 / 203
[ Back to top ]