
Fターム[2B034BG05]の内容
土作業機(その他) (8,058) | 制御装置又は報知装置 (134) | 制御又は制御対象 (51)
Fターム[2B034BG05]に分類される特許
41 - 51 / 51
農業管理ロボット
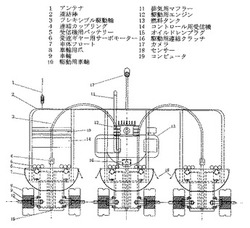
【課題】田植え初期から適切に繰り返し遠隔操作や自動運転で、除草作業が出来る農業管理ロボット。
【解決手段】機体は、機体中央部の駆動用エンジン12を具備した構造で、車軸10と車輪9は着脱可能な除草をかねた前後左右車輪18、24,25,26で構成され、機体に搭載された駆動用エンジン12の出力を駆動用車軸10に出力供給し、前後車輪を回転する。機体側面と前後部に具備されている接触圧センサー18により稲株位置を感知し、エンジン12の車軸10への出力供給を、機体上部に搭載されているコンピュウタ19で車輪の、正転、逆転、停止、回転数変換を制御して、条間に沿って自動走行しながら土壌撹拌と除草作業をする。またスイッチの切り替えにより人が農業管理ロボットに具備されているカメラ7の映像を、遠隔操縦装置で映像を確認しながら遠隔操作ができる構成である。
(もっと読む)
均平作業方法

【課題】
高低差のある圃場等の区画を、牽引車両に牽引される均平機を用いて均一平面にする方法において従来はレーザ光を基準にして、均平板に土を抱えられる程度に高さを保持し、土を抱えなくなったら徐々に均平板を下げることを繰り返しながら均一にしていた。その結果最後まで均一高さにならず、均平作業後半で低い部分があった場合には、全体から広く薄く運土せねばならず非効率的であった。また、オペレータは常に後方を振り返り均平板の土の様子を見ながら作業せねばならず危険であった。
【解決手段】
本願は均平作業前に圃場高さを測定し、均平にしたときの均平基準面高さを算出し、基準高さと比較した高低マップを運転席に表示し、均平作業中もリアルタイムに測定し高低マップを書き換え、効率的に作業を行えるようにした均平方法である。
(もっと読む)
農用作業機
【課題】 整地装置51を作業位置に下降させた植付作業中に走行機体が前後方向に傾斜しても、整地装置の接地状態の極端な変動を回避して、期待どおりの整地を行える農用作業機を提供する。
【解決手段】 整地装置51を昇降させる整地装置昇降シリンダ102を設け、制御部100は、傾斜センサ95の出力を読み込んで車体15の前後方向の傾斜角を求め、傾斜角に応じて整地装置昇降シリンダ102を作動させることにより、植付装置31に対する整地部52の高さ位置を刻々と調整する。そして、車体15が前上がりの場合には整地部52を水平な場合よりも少し下降させ、車体が前下がりの場合には整地部52を水平な場合よりも少し上昇させる。
(もっと読む)
農用作業機
【課題】 田畦を乗り越える際や圃場脱出時に機体15が前後方向に大きく傾斜しても、田畦や傾斜した路面への整地装置の干渉が回避されて、整地装置51が保護される農用作業機を提供する。
【解決手段】 整地装置51を昇降させる整地装置昇降シリンダ102を設け、制御部100は、傾斜センサ95の出力を読み込んで車体15の前後方向の傾斜角を刻々と判断している。そして、傾斜角が所定値を越えると、前上がり/前下がりの区別無く、また、操作レバー85の設定状態とも無関係に、整地装置昇降シリンダ102を作動させて整地装置51を非作業位置へ上昇させる。
(もっと読む)
走行機に連結される農作業機
【課題】 直線状の畦の形成や水田等の圃場の作業残隅部の作業において、トラクタの操作や蛇行などでその形成が正確に行えない場合があった。また圃場の作業残隅部の作業処理は、その作業がトラクタを反転させる等の困難な作業が多かった。
【解決手段】 装着フレーム1と、作業部3と、装着フレーム1と作業部3とをそれぞれ水平方向回動可能に連結して伸縮可能な回動アーム部2と、回動を制御する制御部4と、制御部の操作部5とを有し、装着フレーム1側のアーム回動軸14より前方位置と回動アーム部2の作業部3側とにスプリング72により伸長方向に付勢され伸縮する連結ロット7を掛け渡し、走行機が蛇行した時や進行方向と直交する面の作業時の作業部の直進性を自動的に補正する。
(もっと読む)
農用作業機
【課題】 整地装置51の昇降操作と、整地装置51に対する動力伝達の入切操作とを連動させて、動力伝達の入切を同じタイミングで繰り返して確実に実行可能とすることにより、整地装置51の操作に伴う作業者の負担を軽減する。
【解決手段】 1個の操作レバー85を操作して整地装置51の昇降と整地装置51に対する動力伝達の入/切とが同時に制御される。整地装置51を上昇させて待機させる非作業状態と整地装置51を下降して接地させた作業状態との中間の高さ位置で動力伝達の入/切を切り替えることにより、整地装置51を下降させた際には、回転状態の整地装置が圃場面に接地して、速やかに正常な整地同時植え付けが開始される。
(もっと読む)
農作業機連結装置
【課題】農作業機の持ち上げ時の回動を容易に行わせようとする。
【解決手段】作業機側のヒッチ(48)に支点軸(50)を設けこの支点軸(50)回りに回動自在にアーム(49)を設け、このアーム(49)には農作業機(46)を保持するホルダ(51)を設けると共に上記ヒッチ(48)に対して作業姿勢と非作業姿勢に固定する手段(6)を設け、このアーム(49)に支点軸(50)軸心から離れた位置から略水平状に延出する中継ロッド(52)を設け、この中継ロッド(52)に踏み込みペダル(55)を連結してなる。
(もっと読む)
農用作業車の制御装置
【課題】枕地での作業精度を向上させる。
【解決手段】旋回走行しうる走行機体に対して昇降可能な作業装置を設け、走行機体には作業装置の非作業位置への上昇及び作業位置への下降の各動作を旋回走行過程における所定のタイミングで行なう自動旋回制御装置を備える。作業装置にはフロートを備えて、フロートの接地により圃場面を均平整地可能に構成し、フロートの接地走行時には作業装置を所定の対地高さとなるように昇降制御可能に構成する。この昇降制御装置の制御感度が所定値より鈍感側に設定されると、前記自動旋回制御装置の実行を停止する。
(もっと読む)
走行機に連結される作業機
【課題】 直線状の畦の形成や水田等の圃場の作業残隅部の作業において、トラクタの操作や蛇行などでその形成が正確に行えない場合があった。またトラクタを旋回させつつ正確な圃場の隅部作業を行うことはできなかった。
【解決手段】 この発明の走行機Bに連結される作業機Aは、装着フレーム1と、作業部3と、装着フレーム1と作業部3とを連結する連結部2と、制御部4と、操作部5とを有し、連結部2は、装着フレーム1に設ける回動支点14を中心に水平方向に回動可能であるとともに装着フレーム1と作業部3間の距離を伸縮可能に設けられており、作業部3が被作業面Dから受ける反力を検知して、作業部3が被作業面Dに作用する圧力を一定範囲になるように連結部2を伸縮させることが可能である。作業部3の実施例としては、連結部2に設けた作業部回動支点32を中心に水平方向に回動可能とすることもできる。
(もっと読む)
走行機に連結される作業機
【課題】 水田等の圃場の作業残隅部の作業処理は、その作業がトラクタを反転させる等の困難な作業が多かった。また、畦等の被作業面が直線でない場合や、草や樹木などの異物がある場合正確に作業が行えない課題があった。
【解決手段】 作業機Aは、装着フレーム1等に設ける回動支点14を中心に回動可能かつ伸縮可能な回動部2と、回動部2に設けた作業部回動支点32を中心に回動可能な作業部3と、回動部2の回動変位量及び伸縮量と作業部3の回動変位量とを制御する制御部4と、制御部4を操作可能な操作部5を有し、作業部3は、走行機Bを走行させた状態で走行機Bの進行方向にほぼ平行な面を作業面34aとして作動することが可能であり、かつ走行機Bの後方に位置させた状態で走行機Bの進行方向とほぼ直交する面を作業面34bとして作動することが可能である。
(もっと読む)
農作業機
【課題】操作性に優れた農作業機を提供する。
【解決手段】農作業機は、作業機本体部と、作業機本体部の両端部に回動可能に設けた折畳作業部と、折畳作業部を回動させるための操作部41とを備える。操作部41は、折畳作業部を閉じ方向に回動させる際に押動操作する作動用ボタン52を有する。操作部41は、作動用ボタン52の押動操作中のみ折畳作業部が回動する手動モードと作動用ボタン52の一度の押動操作により折畳作業部が設定状態になるまで回動する自動モードとの切換えの際に、押動操作するモード切換用ボタン55を有する。
(もっと読む)
41 - 51 / 51
[ Back to top ]