
Fターム[2B034BG05]の内容
土作業機(その他) (8,058) | 制御装置又は報知装置 (134) | 制御又は制御対象 (51)
Fターム[2B034BG05]に分類される特許
21 - 40 / 51
苗移植機
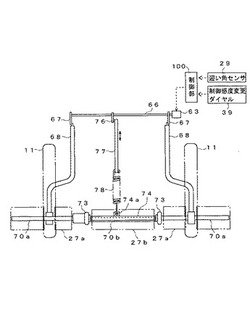
【課題】ロータの上下の変動を勘案して圃場に苗を植え付けることができる苗移植機を提供すること。
【解決手段】油圧シリンダ46によりリンク装置3を介してフロート55を上下動させ、苗植付部4に対して昇降自在に配置され、走行車体2の進行方向を横断する横幅方向に向けて複数個配置されるロータ27a,27bをモータ63で上下動させる。フロート55の前後傾斜角度の複数の設定角度にそれぞれ対応させてフロート55の上下動の感度を敏感側から鈍感側までの複数段階に分けて制御感度変更ダイヤルで制御感度として設定し、モータ63の駆動量の設定に応じてロータ27a,27bの設定高さを調節し、接地圧変動によるフロート55の姿勢変化に基づいて苗植装置4の上下位置を制御し、モータ63によるロータ27a,27bの設定高さを低く設定すればする程、フロート55の制御感度を鈍感側に補正する制御をする制御装置100を設けている。
(もっと読む)
農作業機

【課題】圃場の凹凸を検出しこれを均平にする。
【解決手段】代掻き作業機1は、走行機体に装着されて走行機体の走行に伴って進行し、走行機体からの動力によって回転するロータリ作業部13を備える。ロータリ作業部13の上方にシールドカバー15を設け、このカバー部の後端部にエプロン29を上下方向に回動可能に設け、エプロン29の後端部にレベラ31を上下方向に回動可能に設ける。ロータリ作業部13の前側に機体幅方向一端部から他端部間に亘って延びて上下方向に移動自在に支持された整地板23を設け、整地板23を移動自在に支持するリンク部材19に整地板23の上下移動から圃場の凹凸の高さを検出する凹凸検出センサ25を設ける。エプロン29は回動シリンダ51によって回動可能であり、凹凸検出センサ25によって検出された検出値に基づいて回動制御装置60が回動シリンダ51の作動を制御してエプロン29の傾き角度を調節する。
(もっと読む)
畦塗り機
【課題】圃場条件に拘わらずに前処理体及び整畦体の整畦作業により発生する反力をコールタが受けて、走行機体の直進性を向上させる。
【解決手段】畦塗り機1は、前処理体21及び整畦体25の整畦作業により発生する反力を受けるコールタ60を備える。コールタ60は、オフセット機構部40から伝達される動力を前処理体21及び整畦体25に振り分ける動力伝達機構を有した支持ケース29の後端部に上下方向に回動自在なコールタ支持部材62を介して設ける。コールタ支持部材62は昇降シリンダ63によって回動してコールタ60を上下方向に移動させる。コールタ支持部材62にセンサアーム66を上下回動自在に設け、センサアーム66の枢支部66aにポテンショメータ68を設ける。ポテンショメータ68の信号は制御装置に伝達され、制御装置はポテンショメータ68の信号に応じて昇降シリンダ63の作動を制御してコールタ60の刺さり込み量を一定にする。
(もっと読む)
畦成形機
【課題】従来の畦成形機は、構成や制御が複雑となり、操作が難しいとともに保守点検等にコストが係り全体のコストが嵩む問題があった。
【解決手段】装着フレーム1と、支持フレーム回動軸20を中心に水平回動手段25によって回動可能である支持フレーム2と、支持フレーム2に沿って移動可能に設けられるとともに水平回動する畦成形作業部3と、一端を装着フレーム1の支持フレーム回動軸20よりも前側に回動自在に設けるとともに他端は畦成形作業部3に回動自在に設け装着フレーム1と畦成形作業部3とを連結する連結部材7とを有し、支持フレーム2を走行機Tの直進方向と直交する方向から45度の回動角以内の予め設定した位置に自動回動させ、自動回動させた位置から支持フレーム2を回動させるとともに走行機Tが畦から離れる方向に旋回走行しながら直線状の畦を成形する畦成形作業を行なう畦成形機による。
(もっと読む)
畦成形機
【課題】走行機を旋回及び停止させながら圃場隅部の畦成形を容易に行えるとともに堅固な畦を成形できる。
【解決手段】装着フレーム1から斜め後方へ延設され、装着フレーム1に対し第1水平回動手段21によって水平回動自在に設けられた支持フレーム2と、支持フレーム2に水平移動手段4によって装着フレーム1に対して遠近移動可能である第2水平回動軸54を中心に第2水平回動手段6による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5と、第1水平回動手段21と、第2水平回動手段6と、水平移動手段4とをそれぞれ制御する制御部とを有し、畦成形作業部5を走行機の側方にオフセットさせ、畦と平行に走行機Tを走行させ畦成形作業を行なうことが可能であり、走行機Tが旋回走行しながら直線状の連続した畦を成形する畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
畦成形機
【課題】従来は、作業部に方向等を感知するセンサーが必要であり、制御が複雑となり全体のコストが嵩む問題があった。
【解決手段】装着フレーム1から後方へ延設され、装着フレーム1に対し第1水平回動軸30を回動中心に第1水平回動手段3によって水平回動自在に設けられた支持フレーム2と、支持フレーム2の後端部に設けられた第2水平回動軸40を中心に、第2水平回動手段4による回動又はフリー回動によって水平方向に回動可能である畦成形作業部5と、第1水平回動手段3と、第2水平回動手段4とをそれぞれ制御する制御部と、第1水平回動手段及び/又は第1水平回動軸と第2水平回動手段及び/又は第2水平回動軸の変位量を検知する検知手段を有し、畦成形作業を行なうことが可能である畦成形機による。
(もっと読む)
畦成形機
【課題】従来圃場隅部の作業を行なう作業機は、圃場隅部における畦方向への成形圧力が減少するため堅固な畦を形成できない課題がある。
【課題手段】装着フレーム1から斜め後方へ固定されて延設される支持フレーム2と、支持フレーム2に設けられるとともに、装着フレーム1との距離を伸縮させる水平移動手段4によって支持フレーム2に沿って装着フレーム1に対して遠近移動可能であり、かつ遠近移動可能である1つの水平回動軸54を中心に水平回動手段6又は自由回動によって水平方向に回動可能である畦成形作業部5と、畦成形作業部5の前側に設けられる前部案内輪7と、畦成形作業部5の後側に設けられる後部案内輪8とを有し、支持フレーム2に沿って装着フレーム1に対して遠近移動する畦成形作業部5の水平回動軸54が、常に前部案内輪7と後部案内輪8との間に位置するように設けられる畦成形機による。
(もっと読む)
直播機
【課題】車速や圃場の硬軟が変化しても整地ロータによる圃場の整地性能を維持し、同時に粉粒体吐出機から吐出される種子などを適切な深さに播くことができる直播機を提供すること。
【解決手段】走行車両に圃場内に種子を播くための直播装置142と該直播装置142の前方に直播前の圃場を整地するために回転する整地ロータ27a,27bと、後輪伝動軸回転数205の検出する車速に応じて整地ロータ27a,27bの回転速度を変更する整地ロータ変速装置72を備えた直播機であり、整地ロータ27a,27bの回転速度を車速と連動させることで例えば低車速の時に自然に多量の覆土がなされないように整地ロータ27a,27bの回転素幾度を抑えるため、圃場への播種の深さが深くならない。
(もっと読む)
農作業機
【課題】簡便で低コストの構造で、作業者の操作及び技量によらず作業部が元畦に追従するように機能させるか否かの選択が可能な畦塗り機を提供することを目的とする。
【解決手段】少なくとも作業部40の作業時において作業部40が被作業面に対して接離する方向に移動可能とするリンク機構に、ピストンで分断された、一方のシリンダ室の圧力を他方のシリンダ室の圧力より高く設定した油圧シリンダ15を、作業部40が被作業面側に向けて付勢されるように装着し、油圧シリンダ15の油圧回路中には、圧力を高く設定した方のシリンダ室の圧力が一定圧力以上となった場合に減圧させるための弁と、当該減圧させるための弁をバイパスするバイパス回路と、当該弁を経由するかバイパス回路を経由するかを決定する切換バルブとを設けたことにより上記課題を解決する。
(もっと読む)
草抜き機
【課題】引き抜かれた草に付着している土類を取り除くことができる草抜き機を提供する。
【解決手段】
本発明の草抜き機1は、前方に移動しながら地面に生えている草71を引き抜く草抜き機であって、移動方向に対して直角方向かつ水平方向に設けられた回転軸41を中心に前方回転する第1のローラ4と、第1のローラ4の後方に並設され後方回転する第2のローラ5と、第2のローラ5の後方に配置されている集草箱7とを備える。集草箱7は、第2のローラ5の後方回転に伴って揺動自在に形成されている。第2のローラは、外周面に軸方向に延設された複数の突起部45を有する。集草箱7は、突起部45に当接する当接部53を備えるともに、少なくとも底面に草71に付随して運ばれた土類を下方に落下させる貫通孔52を備える。
(もっと読む)
草抜き機
【課題】根を含む草全体を引き抜くことができる草抜き機を提供する。
【解決手段】
本発明の草抜き機1は、前方に移動しながら地面に生えている草71を引き抜く草抜き機であって、移動方向に対して直角方向かつ水平方向に設けられた回転軸41を中心に前方回転する第1のローラ4と、第1のローラ4の後方に並設され、外周面に軸方向に延設された複数の突起部45を有し、後方回転する第2のローラ5とを備える。第2のローラ5は、第1のローラ4の外周面に対して最近接位置にある突起部45aの先端部と第1のローラ4の外周面とにより草71を挟持可能な間隔を有する位置に設けられ、複数の突起部45は、一の突起部45bが第1のローラ4の外周面に対して近接位置にあるときに、一の突起部45bより回転方向後方にある他の突起部45cが第1のローラ4と第2のローラ5との間に位置する地面72を削る位置に配置されている。
(もっと読む)
草抜き機
【課題】大きな異物の混入による破損を防止することができる草抜き機を提供する。
【解決手段】
本発明の草抜き機1は、前方に移動しながら地面に生えている草を引き抜く草抜き機であって、移動方向に対して直角方向かつ水平方向に設けられた回転軸41を中心に前方回転する第1のローラ4と、第1のローラ4の後方に並設され後方回転する第2のローラ5と、第1のローラ4を駆動させる第1の電動モータ43と、第2のローラ5を駆動させる第2の電動モータ47と、少なくとも第1の電動モータ43又は第2の電動モータ47のいずれかの過負荷状態を検知する過負荷検知手段と、第1の電動モータ43と第2の電動モータ47と過負荷検知手段とに接続された制御手段61とを備える。制御手段61は、過負荷検知手段により過負荷状態を検知したときに、第1の電動モータ43及び第2の電動モータ47の回転を所定時間反転させる。
(もっと読む)
草抜き機
【課題】引き抜かれた草を集めるための構成を小型化することができる草抜き機を提供する。
【解決手段】
本発明の草抜き機1は、前方に移動しながら地面に生えている草71を引き抜く草抜き機であって、移動方向に対して直角方向かつ水平方向に設けられた回転軸41を中心に前方回転する第1のローラ4と、該第1のローラ4の後方に並設され後方回転する第2のローラ5と、第2のローラ5の後方に配置されている集草箱6とを備える。第2のローラ5は、外周面と前記第1のローラ4の外周面とにより草71を挟持可能な間隔を有する位置に設けられ、第1のローラ4の外径をD1、回転数をN1、第2のローラ5の外径をD2、回転数をN2としたときに、D1×N1<D2×N2とする。
(もっと読む)
除草機
【課題】従来、除草作業時に除草爪や機体の一部が収穫前の乾燥している作物(大豆)に接触し、作物(豆を覆っているサヤ(莢))に衝撃が加わって脱粒が発生し、多大の収穫ロスを招く問題があった。
本発明の課題は、作物(大豆)収穫前の除草作業時に、作物(大豆)に対する水分散布により作物(大豆のサヤ)を保湿することで脱粒を防止し、しかも、水分量のコントロールによって保湿性を良好にし、上記問題点を解消して収穫率の向上を図ることにある。
【解決手段】本発明は、走行車両の進行方向前側に設けられていて作物に対して水分を散布する水分散布手段と、進行方向後側に配置されていて左右の作物条列間における畝間に沿って移動し溝部の表土を掘削しながら除草する除草手段を備え、且つ、前記水分散布手段にはこの水分散布量を任意に増減できる散布量制御手段を設けてあることを特徴とする除草機の構成とする。
(もっと読む)
管理機装着除草機
【課題】管理機と除草機が前後に長く固定的に連結されていたのでは、管理機の走行車輪位置と除草装置の除草位置との違いによって走行車輪が作物を避けて走行しても除草装置が作物を傷つける場合があるので、これを防ぐような管理機装着除草機に構成にすることを課題とする。
【解決手段】水平回転する回転刃1を有する除草機2の機枠18前側左右中央を管理機3の後部に連結縦軸4で該機枠18が管理機3に対して左右屈曲可能に牽引装着して管理機装着除草機を構成した。そして、管理機(3)から除草機(2)に動力を伝動する伝動部(5)のユニバーサルジョイント(6)を連結縦軸(4)の上下どちらかに位置させている。
(もっと読む)
オフセット作業機及び制御方法
【課題】走行機体の進行に沿ったオフセット位置で圃場隅部までの連続的な前進作業を可能にする。
【解決手段】畦塗機100は、走行機体のオフセット位置で作業可能な作業部120と、この方向と位置の基準値を設定する記憶部と、作業部の方向及び位置を検出する角度センサ150及び位置センサ151と、作業部の方向及び位置を調整する方向シリンダ141及びオフセットシリンダ140と、これらのシリンダの駆動を制御する制御手段160を備える。制御手段160は、作業部の位置と方向を所定状態に維持して走行機体の走行に沿って作業部が作業する通常作業モード、予め設定された作業部の方向と位置を基準値とし、走行機体の走行方向の変化に伴う作業部の位置と方向の変化を調整して直線状作業を維持する自動直進作業制御モード、このモード終了時の位置を起点とし、圃場隅部に残存する未作業部分を直線状又は円弧状に作業する自動隅部作業制御モードを有する。
(もっと読む)
中耕除草機
【課題】一定の耕深を保って中耕を行う。
【解決手段】中耕除草機10は、トラクタ100後部の3点リンク機構205に連結するための連結機構70と、圃場の中耕を行う中耕機構30と、連結機構70と中耕機構30とを支持するフレーム機構120と、中耕機構30よりも機体進行方向前方のフレーム機構120に設けられ、未中耕の土壌表面Gに対する検出機構支持フレーム230下面の高さHaを検出する高さ検出機構220と、高さ検出機構220によって検出された高さHaを、トラクタ100の昇降調整機構216に伝達する高さ伝達機構240と、を備える。
(もっと読む)
除草機
【課題】作物条間の除草を行う除草機は、複数条の除草を同時に行う複数基並設配置の形態が多く、作物条間隔が変化する場合は除草機の取付部をツールバーに対して左右に摺動する構成では移動が円滑でなく、迅速な調節を行い難い。
【解決手段】 作物の育成される作物条間の土壌面の除草を行う除草機において、機幅中央部にセンタ除草機(1)を配置し、このセンタ除草機(1)の左右両側部に、このセンタ除草機(1)よりも後位周りにサイド除草機(2,2)を上下軸心回りに水平揺動させて除草条間隔を変更可能に設ける。除草機1、2の条間隔が狭くなるほどセンタ除草機1に対するサイド除草機2が後側位置になるため、除草作用抵抗が前後に偏位して除草進行性を安定させる。
(もっと読む)
鎮圧機構
【課題】車輌本体にリフトアームを介して昇降可能に連結され且つ耕耘リヤカバーが耕耘上面カバーに対して回動可能とされた耕耘機に適用される鎮圧機構であって、鎮圧バネによる鎮圧力を容易に変更し得る鎮圧機構を提供する。
【解決手段】耕耘リヤカバーが外力によって耕耘爪軸から離間する開方向へ回動されるに従って該耕耘リヤカバーを前記耕耘爪軸に近接する閉方向へ向けて付勢する鎮圧力が大きくなるように配設された鎮圧バネと、前記耕耘リヤカバーに開方向への外力が付与されていない際の前記鎮圧バネの初期鎮圧力を変更可能な鎮圧バネ用アクチュエータとを備える。
(もっと読む)
除草ロボット
【課題】簡易且つ経済的に水田雑草の防除を可能とする、除草用の自走ロボットを提供する。
【解決手段】ボディと、ボディの左右に設けられた駆動装置と、ボディの前方中央及び左右に設けられたセンサーと、水田表層土の撹拌装置とを備え、障害物を避けて走行し、表層土を撹拌することを特徴とする水田除草ロボットであり、前記撹拌装置は、クランクの揺動により上下前後に振動する撹拌ブレードからなる撹拌装置、回転軸に取り付けられた回転する撹拌ブレードからなる撹拌装置、又は回転軸に取り付けられた回転する弾性を有する撹拌ブレードと反発発生固定棒とからなる撹拌装置のいずれか一つ以上を用いることが好ましい。
(もっと読む)
21 - 40 / 51
[ Back to top ]