
Fターム[2B062CB06]の内容
移植機(田植機の要素) (4,646) | センサー (158) | 非接触式 (32)
Fターム[2B062CB06]の下位に属するFターム
Fターム[2B062CB06]に分類される特許
1 - 20 / 20
苗移植機
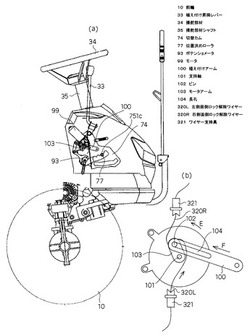
【課題】線引きマーカを自動下降させるとともに、それを簡単な構成で実現出来る苗移植機を提供すること。
【解決手段】苗を圃場に植え付ける植え付け装置7と、圃場に直進用の目印を形成する線引きマーカ1と、植え付け装置7を上昇、下降、又は植え付け入・切りさせる植え付け昇降レバー33と、走行輪の回転数を検出する回転センサ182と、植え付け昇降レバー33を自動的に移動させるモータ99と、線引きマーカ1とモータ99の間に設けられ、モータ99の駆動により線引きマーカ1を待機位置から使用位置へと移動させる移動機構32と、走行回転検知部182の出力に基づいて、旋回終了時にモータ99を動作させることで、植え付け装置7を下降させる制御部330を備え、モータ99の動作により、移動機構によって線引きマーカ1が使用位置へと移動される、苗移植機である。
(もっと読む)
水田作業機

【課題】水田作業機において、畦際での旋回終了を適切に検出する。
【解決手段】右の車輪2に動力を伝達する右のサイドクラッチ40と、左の車輪2に動力を伝達する左のサイドクラッチ40とを備える。操向操作自在な車輪1が直進位置A1側から右又は左の操向限度A3側に操向操作されると、右又は左のサイドクラッチ40が遮断状態に操作され、操向操作自在な車輪1が右又は左の操向限度A3側から直進位置A1側に操作されると、遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されるように構成する。車輪2の回転数に基づいて機体の前進及び後進の走行距離を検出する走行距離検出手段を備える。遮断状態に操作された右又は左のサイドクラッチ40が伝動状態に操作されたことと、走行距離検出手段で検出された機体の前進の走行距離と機体の後進の走行距離との差、とに基づいて旋回終了を検出する。
(もっと読む)
田植機
【課題】正面にポールを立設することなく、簡易な操作で苗を整列させることができる田植機を提供することを目的とする。
【解決手段】往路又は復路において、操作者がGUI151a又は151bを選択することによって、右フロントカメラ又は左フロントカメラが撮像した画像を撮像表示部151に表示させる構成とした。また既設の情報表示部と撮像表示部151とを一体化した。またいわゆるバックモニタとして撮像表示部151を使用できる構成とした。
(もっと読む)
移動作業機の自動操縦装置
【課題】移動作業機の例として、稲刈り機やトラクターなどが挙げられるが、これらの移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】レーザー光の発信機能及び受信機能を有し、目標物の方向及び距離を検出する測定装置を備えた移動作業機があって、移動作業機の作業領域の周囲に反射材を有する複数の案内支柱を設置し、案内支柱を目標物として測定装置の検出した情報を基に移動作業機の進路方向及び移動距離を演算する演算装置と、演算装置の結果を基に移動作業機の操縦装置を操作する制御装置を備えることにより、案内支柱に沿って移動作業機が自動で作業を行うことを可能にした。
(もっと読む)
移動作業機の操縦制御装置
【課題】乗用型移動作業機の自動操縦を実現し、作業者の負担を軽減することを目的とする。
【解決手段】移動作業機に設置した1つの可動式方向測定装置と、2つの可動式距離測定装置により作業領域の周囲に設置した複数の案内支柱を検出して移動作業機の進路の基準とし、移動作業機の進行に伴って目標とする案内支柱を切り換えながら途切れることなく検出し、移動作業機に内蔵する演算制御装置が正しい進路を進行するよう移動作業機を制御することで、移動作業機の案内支柱の列に沿った前進、転回を自動操縦で行うことを可能とし、前記課題を克服する。
(もっと読む)
水田作業車
【課題】水田作業車において、作業装置の昇降に伴って右又は左のマーカーを自動的に作用姿勢に操作するマーカー操作手段、及び、旋回終了位置の検出に基づいて作業装置を自動的に作業状態に操作する作業装置操作手段を備えた場合、マーカー操作手段及び作業装置操作手段を適切に作動及び停止状態に設定することができるように構成する。
【解決手段】マーカー操作手段54及び作業装置操作手段55の両方が作動する作動状態と、マーカー操作手段54及び作業装置操作手段55の両方が停止する停止状態とを設定するもので、人為的に操作される単一の人為操作具46を備える。
(もっと読む)
田植機
【課題】苗植装置における植付アームの回転変動に起因する異常振動が生じた場合であっても、欠株および苗の植付け不良の発生を抑制することができる田植機を提供する。
【解決手段】苗植装置を装着した走行機体に、エンジンの動力を変速して走行装置に伝達する無段変速装置21と、変速ペダル16の操作量により無段変速装置21の変速比を変更する変速アクチュエータ60とを備える田植機において、苗植装置の植付アーム33の回転変動を検出する回転変動検出手段88と、回転変動検出手段88により検出された回転変動が設定値を超えたとき、植付アーム33の回転変動に起因する異常振動が発生したと判断し、変速アクチュエータ60の駆動を制限する制御装置80とを備える。
(もっと読む)
田植機
【課題】 走行機体の後部に苗植付け装置を昇降可能に連結するとともに、苗植付け装置における植付け部位の前方に整地装置を配備してある田植機において、深植え傾向になることを回避するとともに、苗植付け装置を前後に短いものにして機体方向転換などを容易に行えるようにする。
【解決手段】 苗植付け装置5を、整地フロートを備えないものに構成するとともに、整地装置16の前方に苗植付け装置5の田面に対する高さを検知する高さ検出機構26を配備し、高さ検出機構26の検出情報に基づいて苗植付け装置5を昇降制御する制御手段を備えてある。
(もっと読む)
水田作業機
【課題】 機体の後部に水田作業装置を昇降自在に支持し、水田作業装置に対地作業装置を備えた水田作業機において、水田作業装置が設定高さから下降側に変位した場合、対地作業装置が田面の泥を押してしまう状態を少なくする。
【解決手段】 水田作業装置の田面Gからの高さを検出する高さセンサー68と、高さセンサー68の検出値に基づいて水田作業装置を田面Gから設定高さに維持するように昇降駆動する昇降制御手段とを備える。水田作業装置5に対地作業装置53を昇降自在に支持し、対地作業装置53を水田作業装置に対して昇降駆動する昇降機構56を備える。水田作業装置が設定高さから下降側に変位すると、昇降機構56を対地作業装置53の上昇駆動側に作動させる上昇手段を備える。
(もっと読む)
農用作業車
【課題】GPSにより車体位置を計測しつつ、自律的に直進走行する農用作業車において、ティーチング経路を折れ線状や曲線状に生成することを可能とする技術を提供する。
【解決手段】GPSユニット102と、処理部110を備え、目標経路上を自律的に走行する田植機1であって、GPSユニット102により計測される位置情報に基づいて、ティーチング開始時から終了時まで、田植機1の車体位置を所定の間隔ごとに測定して、複数の車体位置(測定点Aから点G)を記録し、該記録に基づいて、走行した前後二つの測定点を直線で結ぶ線分の集合として、処理部110によりティーチング経路を生成し、該ティーチング経路に対して平行な目標経路を生成し、該平行な目標経路の線間距離は作業幅(即ち、植付幅aに植付条数bを乗じた距離(6a))とする。
(もっと読む)
田植機における植付苗量制御方法及び装置
【課題】田面に植え付けられた苗を検出して植付苗量を制御することが可能な田植機における植付苗量制御方法及び装置を提供する。
【解決手段】苗使用量検出器14(ロータリエンコーダ14e)と植付苗検出装置15(光センサからなる前後部センサ15b、15c)との検出値に基づいて、苗植付け体10により田面に植え付けられた苗の使用量、苗が植付けられた面積、苗植付け株間、田植機1の走行速度を算出し、当該算出値に応じて予め設定した苗マット枚数で所定の面積を植付けるように、苗植付け体10による苗の取出し量を増減させる制御装置23を備えるようにする。
(もっと読む)
乗用型田植機
【課題】 乗用型田植機において、苗植付装置の前部に整地装置を支持した場合、植付設定高さを変更しても(設定深さを変更しても)、田面から整地装置までの高さ(整地深さ)が変化しないように構成する。
【解決手段】 整地装置53を苗植付装置の前部に昇降自在に支持し、整地装置53を苗植付装置に対して昇降駆動するアクチュエータ56を備える。苗植付装置の植付設定高さA1の変更に基づいて、整地装置53が田面Gから整地設定高さA2に維持されるようにアクチュエータ56を作動させる。
(もっと読む)
植え付け作業機の昇降制御構造
【課題】 部品レイアウトに苦慮することなく、又、コストの高騰並びに組み付け性やメンテナンス性の低下を招くことなく、植え付け深さ調節にかかわらず、自動昇降制御において、苗植付装置を予め設定した接地高さ位置に精度良く維持できるようにする。
【解決手段】 操作手段51により、植付機構16に対する接地体17の高さ位置を変更することで植え付け深さが調節され、制御手段40が、揺動角度検出手段54で検出される接地体17の検出角度θbが予め設定した制御目標角度θoと一致するように、苗植付装置昇降用のアクチュエータ2の作動を制御することで、苗植付装置4が予め設定した接地高さ位置に維持されるように構成した植え付け作業機の昇降制御構造おいて、植え付け深さ調節に連動して、揺動角度検出手段54の検出角度θbを補正する補正手段64を備えてある。
(もっと読む)
移植機
【課題】旋回中のスリップなどに影響を受けることなく、一定のタイミングで植付クラッチを自動的に入操作し、各行程の植付開始位置を精度良く揃える。
【解決手段】走行機体1に連結される植付部3と、該植付部3への動力供給を入切する植付クラッチとを備える乗用田植機(移植機)において、走行機体1の左車輪回転及び右車輪回転を検出し、その検出信号に基づいて植付クラッチを自動的に入操作する制御装置9を備え、該制御装置9は、左右車輪8の回転差が所定以上となることに基づいて旋回開始を判断し、旋回開始判断後、左右車輪8の回転差が所定以下となることに基づいて旋回終了を判断し、さらに、旋回終了を判断してから所定距離走行後に植付クラッチを自動的に入操作する。
(もっと読む)
移植機
【課題】次回の旋回方向を正確に判断すると共に、判断した旋回方向に対応しない左右車輪の回転差を無視し、旋回開始タイミングの誤認を防止する。
【解決手段】植付部3から左右外側方に選択的に振り出され、次植付行程に走行基準線を引くマーカ9L、9Rと、走行機体1の左後輪回転及び右後輪回転に基づいて走行機体1の旋回を判断する制御装置24とを備えた移植機において、前記制御装置24は、マーカ9L、9Rの振り出し方向に基づいて次回の旋回方向を判断すると共に、判断した旋回方向に対応する左右後輪8の回転差に基づいて旋回開始を判断する。
(もっと読む)
圃場作業車両
【課題】簡易な構成で信頼性の高い制御部により自律直進操舵制御の不安定化を回避して異常走行を確実に防止することができる圃場作業車両を提供する。
【解決手段】圃場作業車両1は、機体方向を示す機体方位情報9に基づき、別途設定の目標方位に対する機体方位の偏差が小さくなる方向に操向装置の舵角を操作する自律直進操舵制御を行う制御部21を備えて構成され、上記制御部21には、方位偏差の低減に適する走行速度を基準速度として別途設定し、機体の走行速度情報25に基づいて同走行速度が上記基準速度に満たない範囲について上記自律直進操舵制御を強制解除するものである。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6を設けた走行車両1に苗移植作業装置3を昇降自在に装着した乗用型苗移植機において、左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回モード中に、機体に設けた車両傾斜センサS4が機体の所定角以上の傾斜検出をすると、該自動旋回モードを中止する制御装置170を設けた乗用型苗移植機。
(もっと読む)
乗用型苗移植機
【課題】旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、旋回操作性の点において課題があった。
【解決手段】操向用の左右前輪6を設けた走行車両1に苗移植作業装置3を昇降自在に装着した乗用型苗移植機において、左右前輪6を所定角度以上に操向操作すると苗移植作業装置3を上昇させる指令を出力して苗移植作業装置3を上昇させ、且つ、走行距離算出手段にて走行距離を算出して、該走行距離に応じて苗移植作業装置3が下降する指令を出力する自動旋回モード中に、報知ブザーや報知灯などの報知手段Bを作動させる制御装置170を設けた乗用型苗移植機。
(もっと読む)
乗用型作業機
【課題】 従来、前輪に対する操向操作を行うだけで、旋回内側の後輪を制動させて旋回を操作性良く行える乗用型田植機があるが、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題がある。
【解決手段】作業装置7を昇降可能に備えて対地作業しつつ走行する機体の旋回動作を制御するとともに、その旋回動作と連動して作業装置7の稼動と昇降を制御する制御部を備える乗用型作業機において、該作業装置7の稼動、下降、または上昇を制御する為に機体の走行距離を検出する検出装置Sを機体に設けたミッションMの上面に配置して設けた乗用型作業機。
(もっと読む)
農用作業車の制御装置
【課題】農作業車の畔際での旋回走行を円滑にする。
【解決手段】走行機体(1)の旋回動作を検出する旋回検出手段(19)により検出される旋回開始のタイミングと対応して農作業装置(7)の上昇及び駆動停止並びに走行距離計(26)の計測開始を指令し、その走行距離から判定される旋回走行の終了による次行程の作業開始位置への到達によって農作業装置(7)の下降及び駆動開始を指令する自動旋回制御を行なう制御部(16)を備える農作業車の昇降制御装置において、自動旋回制御中に走行機体(1)が後進走行すると、農作業装置(7)を所定位置まで下降させて停止する。
オペレータの後方視界を良くし、機体を畔際ぎりぎりまで後進させることができ、枕地植付作業等を円滑に行なうことができる。
(もっと読む)
1 - 20 / 20
[ Back to top ]