
Fターム[2B083DA07]の内容
収穫機の構成要素−刈取部 (10,121) | 駆動源 (876) | 刈刃以外の駆動源 (30)
Fターム[2B083DA07]に分類される特許
21 - 30 / 30
自走式作業機の負荷制御機構

【課題】内燃機関により作業を行い電動モータにより走行する自走式作業機において、作業負荷を内燃機関の運転状況から演算して適正な負荷量となるように走行速度を自動制御することで、簡単な制御で作業の仕上がりを良好に保つことができ、作業者の作業負担を軽減することができる自走式作業機の負荷制御機構を供する。
【解決手段】設定された指示機関回転数Nfから最大作業出力Qfを演算する最大作業出力演算手段と、設定された指示機関回転数Nfと検出された実機関回転数Nrから実作業負荷Qrを演算する実作業負荷演算手段と、最大作業出力Qfと実作業負荷Qrから制限速度Vcを演算する制限速度演算手段と、実機関回転数Nrが指示機関回転数Nf未満に低下したときに制限速度Vcを走行速度Vに設定して電動モータを駆動制御する走行制御手段とを備えた自走式作業機の負荷制御機構。
(もっと読む)
芝刈機

【課題】モーアの芝草搬送性能の向上。
【解決手段】縦軸回りに回転する回転刈刃6b,6bをモーアデッキ6aにより覆い、モーアデッキ6aには回転刈刃6b,6bにより刈り取られた芝草を排出する排出口6eを設ける。モーアデッキ6aにおける回転刈刃6b,6bの外周部を覆う部分に、芝草の流れを阻害しないような形状の空気吸入膨出部36,…を多数形成する。そして、空気吸入膨出部36,…の回転刈刃6b,6bの回転方向上手側端部に空気の吸気口36aを構成し、空気吸入膨出部36,…の回転方向上手側端部から回転方向下手側に向けて順次緩い下り傾斜状に小さく構成し、空気吸入膨出部36,…の回転方向下手側端部を回転刈刃6bの外周端部に沿った壁面に緩い傾斜状に接続させる。回転刈刃6b,6bが回転すると、空気吸入膨出部36,…の吸気口36aから空気が流入し、芝草の搬送力がアップする。
(もっと読む)
歩行型草刈機
【課題】 ハウジング内に縦軸心周りに回転駆動される刈刃を収容した草刈部に、前後の走行車輪、および、操縦ハンドルを装備するとともに、前記草刈部の上部に原動部を搭載してなる歩行型草刈機において、ハウジングに備えた垂れカバーによる刈草飛散防止機能を十分発揮させながら、草の押し倒し少なく刈取りを行うことができるようにする。
【解決手段】 ハウジング1の前後に垂れカバー65を配備するとともに、走行車輪4を備えた前後の車軸13に垂れカバー65の上部をそれぞれ前後揺動可能に遊嵌支持してある。好ましくは、垂れカバー65の揺動範囲を接当規制するストッパ65bを備える。
(もっと読む)
歩行型草刈機
【課題】 ハウジング内に縦軸心周りに回転駆動される刈刃を収容した草刈部に、前後の走行車輪、および、操縦ハンドルを装備するとともに、草刈部の上部に原動部を搭載してなる歩行型草刈機において、草の中に隠れている硬い異物に接触することがあっても刈刃駆動構造に損傷をもたらすことを回避して草刈り作業を続行することができるとともに、別仕様の刈刃を必要とすることなく刈取り形態を変更することができるにする。
【解決手段】 縦軸心p周りに回転駆動される円板状の基板66の外周複数箇所に縦向きの支点ボス66cを設け、この支点ボス66cの上端あるいは下端に刃片67を回動可能に枢着して刈刃2を構成してある。
(もっと読む)
歩行型草刈機
【課題】 ハウジング内に縦軸心周りに回転駆動される刈刃を収容した草刈部に、前後左右の走行車輪、および、操縦ハンドルを装備するとともに、前記草刈部の上部に原動部を搭載してなる歩行型草刈機において、長い草の繁茂した草地での草刈作業を円滑に続行できるようにする。
【解決手段】 前後の走行車輪4を囲繞する分草具17を草刈部3に固定装備する。好ましくは、分草具17を前後の走行車輪4に亘って一連に構成する。
(もっと読む)
歩行型草刈機
【課題】 ハウジング内に縦軸心周りに回転駆動される刈刃を収容した草刈部に、前後の走行車輪、および、操縦ハンドルを装備するとともに、前記草刈部の上部に刈刃および走行車輪を駆動する原動部を搭載してなる歩行型草刈機において、車輪駆動構造の簡素化を図りながら刈り高さを調節することができるとともに、刈り高さを高く調節しても刈草や塵埃の不当な飛散を抑制することができるようにする。
【解決手段】 縦軸心p周りに駆動される刈刃駆動軸に回転伝達可能かつ軸心方向に移動操作可能に刈刃軸を嵌合連結し、刈刃軸を刈刃駆動軸に対して上下調節することで、刈刃軸に連結支持した刈刃2をハウジング1および走行車輪4に対して上下に位置調節する。
(もっと読む)
走行型芝刈機
【課題】駆動ベルトの歯飛び現象を簡単に防止できる走行型芝刈機の提供。
【解決手段】刈取った草を、前記集草ダクト部から後方の前記排出ダクト50に排出させ、歯付きベルト35の内周側歯または外周側歯の一方を係合させる駆動側の歯付きベルト車51と、前記歯付きベルトの内周側歯または外周側歯の他方を係合させる従動側の歯付きベルト車52とを、前記駆動側の縦軸20及び前記従動側の縦軸19にそれぞれ設け、前記駆動側の縦軸と、前記従動側の縦軸が、互いに反対方向に回転するように、前記歯付きベルトを巻回し、前記歯付きベルトを前記集草ダクト部の前方に迂回させるための複数の中間ベルト車53,54を、前記集草ダクト部の前方のモアケース18の上面側に配置し、前記駆動側の歯付きベルト車の外周側には、前記歯付きベルトの外周側歯に対向するように、歯飛び防止用の規制手段75を配置した。
(もっと読む)
草刈り機
【課題】 推進力不足が発生しにくい状態で小回り旋回をすることができる草刈り機を提供する。
【解決手段】 左右の後車輪2を各別に変速駆動する一対の後輪変速装置32,32を備えてある。両後輪変速装置32の電動アクチュエータ及び操向センサ34が連係された操向制御手段33を備えてある。前車輪1が直進向きから設定角以上横向きになった横向き側操向状態に操向操作されると、操向制御手段33は、旋回内側に位置する後車輪2が旋回外側に位置する後車輪2よりも低回転速度で駆動されるように両後輪変速装置32,32を操作する。
(もっと読む)
自律機械
自律機械(10)を作業区域の自由表面の実質的に全てを横切るように、作業区域の方々に自律機械をナビゲートするための制御システムを提供する。制御システムは、機械(10)に作業区域の境界を追従させ、複数の移動を実施させるよう構成されており、各移動は、機械(10)が作業区域の境界から境界に対してある角度で外側へ移動して、境界へ再び戻ることを含む。機械(10)は各移動の間に作業区域の境界に沿って移動し、かつ機械(10)が実質的に作業区域の全境界を追従しながらこれらの移動を繰り返す。 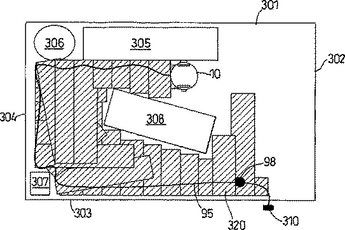 (もっと読む)
(もっと読む)
管理作業車
【課題】 移動回送時に高速移動、作業時に低速移動を安全に行うことができる油圧走行する管理作業車を提供する。
【解決手段】 走行車輪を有する走行台車、前記走行台車に搭載されるエンジン、前記エンジンによって駆動される油圧ポンプ、及び前記走行車輪を駆動する油圧モータを備えた管理作業車において、前記油圧モータがパイロット圧によりその容量を大小二段階に切り替えることができる二速モータであることを特徴とする管理作業車。前記油圧モータは前記油圧ポンプの斜板が中立位置にあり、かつサイドブレーキが掛けられたときのみ、パイロット圧を作動させてその容量を切り替えることができる。
(もっと読む)
21 - 30 / 30
[ Back to top ]