
Fターム[2B304RA01]の内容
農作業機用昇降装置 (9,026) | 主要構成、被制御機器 (505) | 操向、操縦装置 (56)
Fターム[2B304RA01]の下位に属するFターム
変速レバー、変速装置 (23)
Fターム[2B304RA01]に分類される特許
1 - 20 / 33
作業機
苗移植機
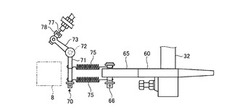
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
乗用型苗移植機

【課題】 乗用型苗移植機において、旋回時に、操縦者は機体の旋回操向操作以外に、作業装置の駆動の入り切り操作や作業装置の上昇・下降操作をしなければならず、旋回時の操向操作に専念できず、未だ、旋回操作性の点において課題があった。
【解決手段】 苗移植作業装置を上昇させると共に走行距離算出手段にて走行距離の算出を開始し、該走行距離に応じて、先ず苗移植作業装置が下降する指令を出力し、その後、前記走行距離に応じて、線引きマーカ(195)が下降する指令を出力する制御装置(170)を設けた。
(もっと読む)
苗移植機
【課題】
後輪ローリング機構をシリンダで制御して、植付作業時や旋回作業時に機体の走行姿勢が作業に適した形態となる姿勢制御装置を設けた苗移植機を提供する。
【解決手段】
車体4の後部に中央回動軸42を中心に左右方向に回動するローリング機枠41を設け、ローリング機枠41の両端部に後輪3,3に回転駆動力を供給する後輪伝動ケース8,8を設け、ローリング機枠41を回動させる回動アクチュエータ9を設け、ハンドル1の操舵角度を検出する操舵角度検出部材7を設け、操舵角度検出部材7の検出した操舵角度から旋回内側を判別して回動アクチュエータ9を伸張または収縮させて車体4の旋回内側が低位となる側にローリング機枠41を回動させて傾斜姿勢にする構成とした。
(もっと読む)
苗移植機
【課題】 旋回時、植え付け装置を機械的に自動上昇させる、安価な苗移植機の実現。
【解決手段】 走行車体2の車輪10の方向を制御するピットマンアーム60と、走行車体2の後側に設けられ、昇降油圧シリンダによって昇降させられる植え付け装置と、植え付け装置の昇降、植え付けを設定するための植え付け昇降レバー33と、昇降レバー33の操作に従って、昇降油圧シリンダを制御するカム74、位置決めローラ77等と、ピットマンアーム60に連結された連繋部材61、62、64、71と、連繋部材61、62、64、71に連結された旋回切替操作具73とを備え、旋回切替操作具73は、操舵部材が所定量以上回動すると、カム74、ローラ77などを機械的に駆動することによって植え付け装置52を上昇させるモードと、操舵部材が所定量以上回動しても、カム74、ローラ77などを駆動しないモードが選択出来る。
(もっと読む)
農作業機
【課題】 本発明は、機体の旋回制御を、簡単な構成で行えるようにすること及び様々な旋回形態に対応できるようにすることを課題とする。
【解決手段】 機体の畦際旋回時に農作業装置の作動を停止し、作業開始位置で自動的に農作業装置の作動を開始させる制御装置を設けた農作業機において、農作業装置の作動を入切する操作レバー(19)と、該操作レバー(19)を各々の操作位置に位置決めする位置決め機構と、操作レバー(19)を作動させるレバーモータ(99)と、位置決め機構を位置決めしない状態に解除する位置決め解除機構とを設け、レバーモータ(99)から操作レバー(19)への作動連繋機構に融通機構(132a)を設け、前記作業開始位置で、レバーモータ(99)を駆動することにより、位置決め解除機構を作動させると共に操作レバー(19)を作業位置(A)に作動させる構成とした。
(もっと読む)
作業車両
【課題】作業車両において、作業機を昇降させることのできるフィンガーレバーを利用した左右操舵装置、及びウインカ点滅を可能にする。
【解決手段】ステアリングハンドルの近傍に一回の操作で作業機を昇降させることのできるフィンガーレバー、該フィンガーレバーの昇降操作検出用のフィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチ、及び、チエックヒューズを設け、旋回切れ角センサの故障時には前記チエックヒューズを取り外すと緊急操舵モードに移行し、前記フィンガーレバーの昇降操作に基づく前記フィンガーレバー上げ用スイッチ、フィンガーレバー下げ用スイッチの検出信号により、前記旋回切れ角センサの検出値を無視して前記旋回駆動手段、前記操舵装置を作動させて左右操舵するコントローラを設けたことを特徴とする作業車両とする。
(もっと読む)
作業車
【課題】作業車において旋回する場合に旋回終了位置を適切に検出し、作業装置が適切に作業状態に操作されるように構成する。
【解決手段】機体の走行距離Gと、操向操作自在な車輪1の直進位置からの操向角度とにより、作業行程からの旋回開始L01に基づいて、旋回開始前の機体の進行方向+Y,−Yでの旋回中の機体の位置を検出する。旋回開始位置E1の検出に基づいて、アクチュエータを作業装置5の非作業状態側に作動させ、旋回終了位置E3の検出に基づいて、アクチュエータを作業装置5の作業状態側に作動させる。アクチュエータの作業装置5の作業状態側への作動開始時期を変更可能に構成する。
(もっと読む)
作業車の作業装置昇降構造
【課題】作業車の作業装置昇降構造において、旋回の終了に伴って上昇状態の作業装置が地面まで自動的に下降されるように構成した場合、作業装置が下降されるタイミングのばらつきを抑える。
【解決手段】機体の旋回が開始されてから前輪1の操向角度を検出する角度センサー31の検出値が操向限度B側から設定角度A2に達すると、又は機体の旋回が開始されてからの機体の走行距離を計測する距離センサー27の計測値が設定距離に達すると、又は機体の旋回が開始されてからの時間の経過を計測するタイマーの計測値が設定時間に達すると、上昇状態の作業装置が地面まで自動的に下降されるように構成する。
(もっと読む)
農作業機
【課題】トラクタに装着し農作業をする農作業機が作業しているか否かをより的確に判定
する判定システムを有する農作業機を提供することを目的とする。
【解決手段】農作業機が移動しているか否かを検知する移動検知手段1と、農作業機の姿勢が作業姿勢であるか否かを検知する作業姿勢検知手段2と、農作業機が作業している否かを判定する判定手段4とを有し、判定手段4は、移動検知手段1からの情報から農作業機が移動中であり、かつ、作業姿勢検知手段2からの情報から農作業機の作業姿勢が作業状態であると判断した場合、当該農作業機が作業中であると判定する。
(もっと読む)
農作業車
【課題】 旋回制御にあっては、目標の180度の操向旋回や作業条合わせ等を自動的に行なわせることが難しい。
【解決手段】 ステアリングハンドルの切れ角を検出するハンドル切れ角センサと、左右の後車輪へ伝動する伝動軸と、該伝動軸の回転を検出する車軸回転センサと、後車輪のサイドクラッチを設け、車体の後部に苗植装置を昇降可能に装着し、苗植装置を上昇させると車軸回転センサにより回転数のカウントを開始し、伝動軸の回転数のカウント値が第一の目標回転数N1に到達したことを車軸回転センサが検出するのに起因して苗植装置を自動的に下降させる信号を出す旋回連動制御装置を設け、該旋回連動制御装置は、伝動軸の回転に対するハンドル切れ角θの関係に基づいて補正値n0を演算し、該補正値n0により前記第一の目標回転数N1を補正する構成とした。
(もっと読む)
作業車の走行制御装置
【課題】 GPS位置情報算出手段により求められる車体の位置情報を有効に利用することで、低コストのジャイロ装置を用いてコスト低減を図ることを可能にしながらも、設定経路に沿う操向制御を極力良好に行えるようにする。
【解決手段】 車体の位置情報を求めるGPS位置情報算出手段100、車体の方位変位情報を検出するジャイロ装置57、ジャイロ装置57にて車体の方位変位情報が適正に検出されているジャイロ情報適正状態であるか適正に検出されていないジャイロ情報不適正状態であるかを判別するジャイロ情報判別手段103が備えられ、ジャイロ情報適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報及びジャイロ装置57による車体の方位変位情報に基づいて操向制御し、且つ、ジャイロ情報不適正状態であることが検出されると、GPS位置情報算出手段100による車体の位置情報のみに基づいて操向制御する。
(もっと読む)
苗移植機の旋回制御装置
【課題】苗移植機の旋回時に、オペレーターの操作負担を軽減するために構成した制御装置において、旋回中に後進すると、旋回後、植付クラッチの入りと、苗植付装置の下降とのタイミングが合わない課題があった。
【解決手段】この発明は、上記課題を解決するために、コントローラ(6)は、走行車体の旋回操作に関連して、植付クラッチを切り側に、昇降機構を上昇側に、それぞれ制御し、旋回距離が、予め、苗植付装置を下降側に制御する設定値(N1)と、植付クラッチを入り側に切り替える設定値(N2)とに達すると、下降とクラッチ入りとの制御をする構成とし、前記設定値(N1)は、走行車体が、旋回中に後進を行うと、通常旋回時より速く下降タイミングが取れるように補正する制御を可能とした苗移植機の旋回制御装置である。
(もっと読む)
作業車の車体状態切り換え構造
【課題】 旋回走行の開始から車体の状態が第2状態に切り換わるまでに要する時間が長くなることを抑制しながら、位置合わせ走行時に車体の状態が不測に第2状態に切り換わる誤作動の発生を抑制して、それらに起因した不都合の発生を抑制することにある。
【解決手段】 操舵輪7の直進位置からの切れ角を検出する切角センサ55と、この切角センサ55の検出に基づいて車体の状態を切り換える車体状態切換手段48とを備え、切角センサ55により検出される切れ角が設定角度を超えると、車体状態切換手段55が、車体の状態を第1状態から第2状態に切り換えるように構成した作業車の車体状態切り換え構造において、車体の作業走行経路に対する位置ズレを修正する位置合わせ走行の開始を検知するとともに、その検知に基づいて設定角度を大きい角度に変更する設定角度変更手段48Eを備えてある。
(もっと読む)
作業車の車体状態切り換え構造
【課題】 作業走行時において車体の状態が不測に第1状態から第2状態に切り換わる誤作動の発生を抑制し、その誤作動に起因した不都合の発生を抑制する。
【解決手段】 切角センサ55が検出する操舵輪7,12の切れ角が設定角度を超えると、車体状態切換手段48が、車体の状態を第1状態から第2状態に切り換えるように構成し、操舵速度を検出する操舵速度検出手段86と、設定角度を変更する設定角度変更手段48Eとを備え、設定角度変更手段48Eが、操舵速度検出手段86の検出に基づいて、操舵速度が遅くなると、設定角度が設定上限角度に達するまでの間、検出された操舵速度に応じて設定角度が大きくなるように、また、操舵速度が速くなると、設定角度が設定下限角度に達するまでの間、検出された操舵速度に応じて設定角度が小さくなるように、設定角度を変更するように構成した。
(もっと読む)
畦成形機
【課題】 走行機の蛇行に対して畦成形作業部を直進させることが困難であった。
【解決手段】装着フレーム1と、支持フレーム2と、制御部8と、検知部7と、盛土部及び成畦部とを有する畦成形作業部5とを具備し走行機Tに装着され作業する畦成形機であり、走行機Tが畦Rに平行して走行しながら畦Rを成形する標準畦成形作業と、走行機Tが畦Rとの間隔を離隔走行しながら畦を成形する離隔畦成形作業と、走行機Tが畦Rとの間隔を狭めながら幅寄せ走行しながら畦を成形する幅寄せ畦成形作業とを行なうことができ、制御部8は、走行機Tが蛇行走行した場合であっても畦成形作業部5の姿勢を自動的に直線の畦を成形できる向きに制御可能な畦成形機による。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも少し下降側にPTO切換位置A4,A5を設定する。昇降レバー12がPTO切換位置A4,A5よりも下降側に位置すると、PTOクラッチ29を伝動状態に操作し、昇降レバー12がPTO切換位置A4,A5よりも上昇側に位置すると、PTOクラッチ29を遮断状態に操作する。昇降レバー12がPTO切換位置A4,A5を越えて下降側に操作される際の操作速度が、設定操作速度よりも低速であると、PTOクラッチ29の伝動状態への操作を阻止する。
(もっと読む)
トラクタ
【課題】デフロック自動モードと手動モード切替の容易化を図る。
【解決手段】対地作業機(2R,2P)の昇降操作に連動してデフロック機構(85,89)のアクチュエータ(86,90)を作動させてデフロック状態とデフ機構(85,89)による連動状態とに切替える自動モードと、手動の選択操作によってデフロック状態とデフ機構(85,89)による連動状態とに切替える手動モードとを、作業機(2R,2P)下降中にデフロック設定手段(30)によってデフロック状態を選択するときは作業機(2R,2P)昇降に基づく自動モードに切り替え、作業機(2R,2P)上昇中にデフロック設定手段(30)によってデフロック状態を選択するときは手動モードに設定する。
(もっと読む)
走行車両
【課題】ハンドル2の押し下げ荷重が比較的軽い歩行型の走行車両を提供すること。
【解決手段】エンジン5からの動力を左右一対の走行車輪7,7にそれぞれ伝達する伝動機構を収納した左右一対の伝動ケース9,9と該伝動ケース9,9を連結機構9A,9B;9A,9Bを介して上下方向に回動させて左右の走行車輪7,7をそれぞれ上下動させる左右一対のアクチュエータ15,15と左右の走行車輪7,7への伝動をそれぞれ断つ左右一対のサイドクラッチとを設け、旋回外側の走行車輪7の駆動反力で旋回外側の伝動ケース9が更に下降するように旋回外側のアクチュエータ15と伝動ケース9との連結機構9A,9Bに長穴15aと該長穴15aに係止されるシャフト9Bのピン9Baからなる遊びを持たせた。
(もっと読む)
コンバイン用油圧構造
【課題】 車輌操向用の一対の油圧アクチュエータ及び刈取・搬送装置昇降用の油圧昇降装置を単一の補助油圧ポンプ本体からの圧油によって作動制御するように構成されたコンバイン用油圧構造であって、前記補助油圧ポンプ本体の圧力損失を可及的に低減させる。
【解決手段】 前記一対の油圧アクチュエータの作動油制御を司る操向用バルブユニットをミッションケースに付設し、且つ、前記油圧昇降装置の作動油制御を司る昇降用バルブユニットを該油圧昇降装置に近接配置させるように前記ミッションケースから離間させると共に、前記ミッションケース内の貯留油を油源とし且つ該ミッションケースに付設された前記補助油圧ポンプ本体からの圧油を前記一対の油圧アクチュエータ及び前記油圧昇降装置へ分流させる分流弁を、前記操向用バルブユニットに設ける。
(もっと読む)
1 - 20 / 33
[ Back to top ]