
Fターム[2B304RA11]の内容
農作業機用昇降装置 (9,026) | 主要構成、被制御機器 (505) | 連結機構 (99)
Fターム[2B304RA11]の下位に属するFターム
トップリンク (11)
ロアーリンク (14)
牽引杆、ヒッチ機構 (4)
連結ブラケット (3)
連結フレーム、マスト (10)
作業機側の連結部材 (20)
複合作業機の連結部材 (12)
付属部材 (8)
Fターム[2B304RA11]に分類される特許
1 - 17 / 17
苗移植機
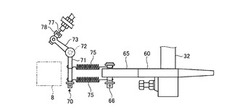
【課題】メカロックを発生させることなく、旋回時により確実に苗植付部を上昇させることのできる苗移植機を提供すること。
【解決手段】苗移植機1に、走行車体2に設けられて走行車体2を操舵するハンドル31と、走行車体2の後部に配設されると共に、苗を圃場に植え付ける苗植付部40と、苗植付部40を上昇させることができる苗植付部上昇機構50と、ハンドル31を操舵することにより回動するステアリングアーム60と、ステアリングアーム60の回動に連動し、苗植付部上昇機構50を作動させることができるオートリフト作動アーム70と、伸縮性を有してステアリングアーム60とオートリフト作動アーム70とを連結することにより、双方の距離が変化可能な状態でステアリングアーム60の回動をオートリフト作動アーム70に伝達する連結スプリング75とを備える。
(もっと読む)
トラクタ

【課題】エンジンのストールを防止するとともに、燃費の良い状態で作業を継続して行うことができるトラクタを提供する。
【解決手段】エンジンと、ロータリ耕耘装置と、昇降アクチュエータと、制御装置と、を備えるトラクタであって、制御装置は、エンジンのエンジン回転数Nrとエンジンの正味平均有効圧力Pmとの関係を示すマップにおいて予め設定される低燃費領域Zを記憶し、出力検出手段により検出されるエンジンの出力に基づいてエンジンの負荷率を算出し、エンジン回転数Nr及び正味平均有効圧力Pmが低燃費領域Zに含まれ、かつ負荷率が上昇用設定負荷率(設定負荷率)以上である状態が上昇用設定時間(設定時間)以上継続した場合、ロータリ耕耘装置を設定角度(設定上昇量)だけ上昇させる。
(もっと読む)
牽引作業車両の対地作業機昇降制御装置
【課題】本発明の目的は、昇降調節とともに傾動動作するいわゆる2Pリンク式のヒッチに装着された対地作業機について、その耕耘作業部の昇降誤差を抑えて所要の耕深を確保することができる牽引作業車両の対地作業機昇降制御装置を提供する。
【解決手段】牽引作業車両の対地作業機昇降制御装置は、傾動制御可能なリフトアーム2によって後部ヒッチ3を一体に支持し、この後部ヒッチ3に検出橇13を圃場面に追従可能に軸支し、その傾動角度と対応する圃場面からの高さに基づいて、上記後部ヒッチ3からその後方に延出して一体装着した作業機フレーム4aを昇降作動制御することにより、同作業機フレーム4aに支持される耕耘作業部6を耕深設定具24によって設定した目標の耕深Dに調節するように構成され、上記検出橇13の圃場面に対する角度dと対応する耕耘作業部6の高さを作業機フレーム4aの昇降角度値Δによって補正するものである。
(もっと読む)
対地作業具の支持装置
【課題】対地作業具の装着時には適正な速度及び付勢力でホルダの回動をアシストしながら、対地作業具を外した状態では、第1付勢具の付勢による回動速度を第2付勢具が抑え、ホルダの上方への回動速度を遅くすることができる。
【解決手段】
作業機K後部の支持フレーム2に上下回動可能に対地作業具4を装着するホルダ5を支持し、このホルダ5を上方側に回動させる方向に付勢して対地作業具4の持ち上げ力を軽減する回動アシスト機構6に、ホルダ5を回動させる付勢方向が同一である第1付勢具7と第2付勢具8とを設け、この第2付勢具8の付勢によるホルダ5を回動させる速度が第1付勢具7より遅くしている。
(もっと読む)
対地作業具の支持装置
【課題】付勢具を支持フレームに略沿わせて配置して、コンパクトにすることができると共に、付勢具の付勢力を効率よく対地作業具に伝えることができる。
【解決手段】作業機K後部の支持フレーム2に上下回動可能に対地作業具4を支持し、対地作業具4を上方側に付勢して持ち上げ力を軽減する回動アシスト機構6は、対地作業具4と一体回動するアーム9と、アーム9に枢支された連動リンク11と、連動リンク11に作用軸12で枢支され且つ支軸13で支持フレーム2に枢支された揺動部材14と、揺動部材14に力軸15で枢支された付勢具7とを有し、付勢具7の伸張で作用軸12が後下がりに移動して対地作業具4を作業位置Aから非作業位置Bへ回動させる。対地作業具4の作業位置A時に力軸15を作用軸12の後下方で且つ支軸13の前下方に位置させ付勢具7を支持フレーム2に略沿わせて配置している。
(もっと読む)
作業車
【課題】作業装置の作動形態を設定しての制御を終了した後、再び元の作動形態での制御を行う際や、作業装置の作動形態の設定を行ってから、再度の作動形態の設定を行う際の操作を簡便に行えるようにする。
【解決手段】制御手段101,102,103,104,105による制御作動の入り状態と切り状態とを択一選択可能な切換スイッチ67による制御作動の切り操作に基づいて、制御手段101,102,103,104,105による制御の終了時点における作動形態を不揮発性メモリに記憶する記憶手段106を備え、かつ、切換スイッチ67による制御作動の入り操作に基づいて、各作業装置5,11,30,31を記憶手段106に記憶された作動形態に復元させる。
(もっと読む)
作業車の制御装置
【課題】前輪増速手段又は自動上昇手段を適切なタイミングで作動させることができ、位置合わせ走行の作業性を向上できる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、前輪2を後輪3の周速度よりも速く増速駆動させる前輪増速手段51を備え、前輪2の切れ角が所定増速角度β1以上であると前輪増速手段51が作動するように構成し、車体1の作業走行経路に対する位置合わせ走行を推測する推測手段54を備え、推測手段54により位置合わせ走行が推測されると、前輪増速手段51が作動しないように構成してある。
(もっと読む)
作業車の制御装置
【課題】旋回作業に伴うものでない可能性の高い操縦ハンドルの操作で作業装置が自動的に上昇することを防止し、作業装置の上昇を適切なタイミングで行うことができる作業車の制御装置を実現する。
【解決手段】作業車の制御装置において、切れ角が所定上昇角度α1以上になると、作業装置Rを上昇させる自動上昇手段53を備え、操縦ハンドル6が右側又は左側の一方側に操作された直後に、操縦ハンドル6が右側又は左側の他方側に操作され、他方側への操縦ハンドル6の操作により切れ角が所定上昇角度α1以上になった場合に、自動上昇手段53が作動しないように制御する制御手段を備えてある。
(もっと読む)
乗用型作業機
【課題】旋回制御モードの設定時にブレーキ装置が作動する場合の不具合を解消することができる乗用型田植機を提供すること。
【解決手段】作業車両1が旋回内側の後輪7のクラッチIを切って動作で旋回する時には昇降用リンク装置2を作動させて自動的に苗植付装置3を上昇させ、前記旋回後に直進する時には自動的に苗植付装置3を苗植付け位置に下降させる旋回制御モードを設定しているときに、旋回内側の後輪7のブレーキ装置Jが作動すると、旋回制御モードにおける昇降用リンク装置2による苗植付装置3を苗植付け位置に下降させる作動を禁止して苗植付装置3の破損などを防止する制御を行う制御装置170を設けた乗用型田植機である。
(もっと読む)
作業車のPTOクラッチ操作構造
【課題】 作業車のPTOクラッチ操作構造において、昇降レバー及びポジション制御手段を備えた場合、作業装置の昇降駆動に応じてPTOクラッチを適切に伝動及び遮断状態に操作することができるように構成する。
【解決手段】 所定範囲A1に亘って人為的に操作される昇降レバー12を備えて、ポジション制御手段を備える。所定範囲A1の上限位置A3よりも少し下降側にPTO切換位置A4,A5を設定する。昇降レバー12がPTO切換位置A4,A5よりも下降側に位置すると、PTOクラッチ29を伝動状態に操作し、昇降レバー12がPTO切換位置A4,A5よりも上昇側に位置すると、PTOクラッチ29を遮断状態に操作する。昇降レバー12がPTO切換位置A4,A5を越えて下降側に操作される際の操作速度が、設定操作速度よりも低速であると、PTOクラッチ29の伝動状態への操作を阻止する。
(もっと読む)
昇降リンク構造
【課題】作業車輌における機体フレームの下方に作業機を昇降可能に連結する為の昇降リンク構造であって、前記作業車輌に対する取り付け取り外し作業の容易化を図り、又、前記作業機の最上昇位置を専用の規制部材を設けることなく規制でき、それだけ低コスト化を実現できる構造簡単な昇降リンク構造を提供する。
【解決手段】昇降リンク構造300は、基端部311,311が機体フレーム1,1に連結される第1リンクアーム310,310と、枢支軸330と、基端部341,341が枢支軸330に支持された状態で第1リンクアーム310,310の自由端側312,312に作動連結される第2リンクアーム340,340とを備え、枢支軸330は、機体フレーム1,1に下方から脱着可能とされている。
(もっと読む)
作業車の作業装置連結構造
【課題】 作業車の作業装置連結構造において、リンク機構の支持部材と作業装置の連結部材との連結及び取り外しが容易に行えるように構成する。
【解決手段】 連結部材39を作業装置の前部の前後軸芯周りにローリング自在に備え、作業装置に対する連結部材39のローリングを許容する許容状態及び連結部材39を作業装置に対して所定位置で保持する保持状態に操作自在な保持機構48を備える。リンク機構3の支持部材21と作業装置の連結部材39とを取り外すと、保持機構48を保持状態に操作し、リンク機構3の支持部材21と作業装置の連結部材39とを連結すると、保持機構48を許容状態に操作する保持操作機構51を備える。
(もっと読む)
コンバインにおける前処理部の昇降制御装置
【課題】コンバインを運転操縦するオペレータの好みや作業形態に応じて、前処理部の昇降制御速度を容易に切替ることができる昇降制御装置を提供する。
【解決手段】穀稈を刈取る前処理部16を油圧シリンダ33を介して昇降させる昇降操作具17を備えたコンバインにおいて、前記昇降操作具17の操作位置に応じて前処理部16の昇降速度を変更する可変速昇降制御と、前処理部16を一定の高速で昇降作動させる一定高速昇降制御とに切り替え可能に構成すると共に、当該昇降操作具17の把持部に両昇降制御を切り替える切替手段43を設けた。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘機が地面から離れて非耕耘位置に移動して1行程の耕耘作業を終了するときに、最終的に形成される盛り土及び耕耘跡穴を均すように、耕耘機の姿勢制御を実行できる農作業機の耕耘制御装置を提供する。
【解決手段】作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、耕耘機を昇降動する昇降制御アクチュエータと、耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、耕耘機の耕耘爪の耕耘深さを設定する耕耘深さ設定器と、昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、耕耘制御手段は、リヤカバーが耕耘位置から最閉位置に移動するまでの間は耕耘機をゆっくり上昇させて、耕耘爪による耕土の盛り上がりや耕耘跡穴を小さくし、リヤカバーが離陸した高さから旋回時の高さまでは急激に上昇させるパターンで制御するものである。
(もっと読む)
農作業機の耕耘制御装置
【課題】耕耘機の耕耘作業を簡単にできるものでありながら、耕耘爪の耕耘深さを略一定に維持する耕耘深さ自動制御において、前記リヤカバーの均平性能を向上できる農作業機の耕耘制御装置を提供するものである。
【解決手段】前車輪及び後車輪にて走行自在に支持された作業車両に、耕耘機をリンク機構を介して昇降可能に装着し、前記耕耘機を昇降動する昇降制御アクチュエータと、前記耕耘機のリヤカバーの回動角度を検出するリヤカバーセンサと、前記耕耘機の耕耘深さを設定する耕耘深さ設定器と、前記昇降制御アクチュエータを作動させる耕耘制御手段とを備えてなる農作業機の耕耘制御装置において、前記リヤカバーの閉動側の回動限度を決定するリヤカバー閉動制限機構と、前記リヤカバーの閉動側の回動限度の角度を調整する閉動制限アクチュエータとを備えたものである。
(もっと読む)
走行機に連結される作業機
【課題】 直線状の畦の形成や水田等の圃場の作業残隅部の作業において、トラクタの操作や蛇行などでその形成が正確に行えない場合があった。またトラクタを旋回させつつ正確な圃場の隅部作業を行うことはできなかった。
【解決手段】 この発明の走行機Bに連結される作業機Aは、装着フレーム1と、作業部3と、装着フレーム1と作業部3とを連結する連結部2と、制御部4と、操作部5とを有し、連結部2は、装着フレーム1に設ける回動支点14を中心に水平方向に回動可能であるとともに装着フレーム1と作業部3間の距離を伸縮可能に設けられており、作業部3が被作業面Dから受ける反力を検知して、作業部3が被作業面Dに作用する圧力を一定範囲になるように連結部2を伸縮させることが可能である。作業部3の実施例としては、連結部2に設けた作業部回動支点32を中心に水平方向に回動可能とすることもできる。
(もっと読む)
作業機の傾斜制御装置
【課題】 角度センサからの検出信号と角速度センサからの検出信号に基づい姿勢制御用の駆動機構を作動制御して、作業装置を所定の傾斜姿勢に安定維持させるよう構成した作業機の傾斜制御装置において、エンジン始動直後における角速度センサの零点値設定を好適に行うことができるようにする。
【解決手段】
走行機体に搭載されたエンジンの起動時に、角速度センサからの検出信号を所定複数回に亘って取得し、取得した検出信号の全ての値が設定範囲内にあればこれら複数回の検出信号を平均処理して角速度センサの零点値に設定し、取得する複数回の検出信号に前記設定範囲から外れた値のものが含まれていると、予め記憶されている暫定零点値を角速度センサの零点値に設定する零点設定手段を備えてある。
(もっと読む)
1 - 17 / 17
[ Back to top ]