
Fターム[2B382JD06]の内容
収穫機の構成要素−往復動刃型刈取部 (4,037) | 操作装置、制御装置又はセンサからの信号伝達機構 (58) | 信号又は操作伝達手段 (57) | 電気信号式伝達 (45)
Fターム[2B382JD06]の下位に属するFターム
パルス信号(デジタル信号)
Fターム[2B382JD06]に分類される特許
1 - 20 / 45
コンバイン
【課題】刈取部が接地した場合であっても刈取部が地中に突き刺さってしまう前に刈取部を上昇させることができるコンバインを提供する。
【解決手段】コンバインは、刈取部4を昇降させる油圧シリンダ9と、刈取部4の接地を検出する接地式刈高さセンサ90と、接地式刈高さセンサ90の検出結果に基づいて、油圧シリンダ9を駆動させて刈取部4の上昇制御を行う制御装置70と、を備え、刈取部4が接地した際の走行速度vが第二設定速度V2以上の場合、制御装置70は、刈取部4の上昇速度を速くする制御を行う。
(もっと読む)
コンバインの刈高さ検出装置及びこの刈高さ検出装置を備えた刈高さ制御装置

【課題】比較的狭いスペースに刈高さ検出装置を設けて、刈取部の前後左右の動きに追従して接地体に前後左右方向から作用する外力で刈高さ検出装置が破損しないようにしたコンバインの刈高さ検出装置及び刈高さ制御装置を提供する。
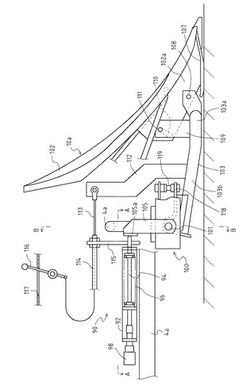
【解決手段】刈取装置(27)に備えた分草体(42)の下部に上下方向の第一支持軸(1)を設け、この第一支持軸(1)に対して第一支持体(2)を上下スライド自在及び回動自在に取り付け、この第一支持体(2)の後側部に設けた前後方向の第二支持軸(3)に対して第二支持体(4)を回動自在に取り付け、この第二支持体(4)に設けた左右方向の第三支持軸(5)に対して斜め後下方へ延出する接地体(6)の基部を取り付け、この接地体(6)の上下揺動による第三支持軸(5)の回動角度を検出する角度センサ(10)を設けたコンバインの刈高さ検出装置
(もっと読む)
コンバインの刈高さ制御装置
【課題】
比較的大きな凹凸部がある圃場での刈取作業でも、刈取部の分草杆の地面への突入を防止しながら刈取作業を行なえるものとする。
【解決手段】
刈取搬送部(7)を昇降させる昇降手段(15)と、刈取搬送部(7)の対地高さを検出する刈取接地センサ(SE2)と、刈取搬送部(7)の対機体高さを検出する刈高さセンサ(SE3)とを備えたコンバインにおいて、刈高さセンサ(SE3)の検出値と目標刈高さ設定値に基づいて昇降手段(15)を作動させる刈高さ昇降制御を実行し、刈高さ昇降制御の実行中に刈取接地センサ(SE2)によって検出される刈取搬送部(7)の対地高さが、刈取接地センサ(SE2)の接地部が地面より上方に離れた場合に検出される離間基準値以上の値になった場合に、刈取搬送装置(7)を下降させる側の出力を停止するコントローラ(21)を設ける。
(もっと読む)
コンバインの前処理昇降制御装置
【課題】刈高さ解除制御で下降させ過ぎた前処理部を少しだけ上昇させるためにマルチステアリングレバーを上昇操作すると、刈高さ解除制御のためにトリガースイッチを操作していることで前処理部が自動上昇駆動してしまい、オペレータの想定を超えて前処理部が上昇するという課題があった。
【解決手段】刈高さ解除制御手段(21C)の作動中は、前処理操作検出手段(22)による昇降操作レバー(11)上昇操作を入力しても、自動昇降制御手段(21A)による前処理部(5)の自動上昇駆動を行わないように牽制した。
(もっと読む)
コンバイン
【課題】圃場面が硬い場合も軟弱な場合も、接地部のスムーズな接地摺動を現出させることができるとともにとともに軟弱圃場での接地部による移動抵抗の増大や接地部への土の乗り上がりの発生を回避しやすいコンバインを提供する。
【解決手段】刈取り部10を接地追従するよう走行機体に昇降自在に支持させてある。刈取り部10を接地支持する接地部18を、接地部18の前端側に位置した支点Pまわりに上下揺動する姿勢変化をさせる姿勢変更手段40を介して刈取り部10の分草杆13に支持させてある。
(もっと読む)
コンバイン
【課題】刈取部が地上面に突っ込んで損傷等されるという不具合の発生を回避すること。
【解決手段】左右一対の走行部間に昇降自在に架設した機体本体と、機体本体の前端部に昇降自在に取り付けた刈取部とを備えたコンバインにおいて、機体本体に設けた作業部のクラッチを切断させる作業終了操作と、機体本体を設定位置まで下降させる下降復帰制御と、刈取部を地上面に接地させないように地上高を制御する地上高制御とを連動させた。作業部のクラッチを切断させる作業終了操作を行うと、機体本体を設定位置(例えば、最下位置)まで下降させる下降復帰制御がなされるとともに、刈取部を地上面に接地させないように地上高を制御する地上高制御がなされる。
(もっと読む)
刈込機
【課題】 モータの高速回転の無駄を省き、1回の充電で刈込機を使用できる時間を長くする。
【解決手段】 ハウジング2と、ハウジング2に内蔵されたモータ5と、ハウジング2に装着されモータ5の電源となる電池パック4と、モータ5に駆動され、上刃と下刃からなる一対の刈刃3,3と、モータ5の駆動を制御する制御回路20と、制御回路20に内臓される制御IC21の信号によりモータ5への駆動電流をオンオフする半導体スイッチング素子と、を有するヘッジトリマ1において、制御IC21の信号は電池パック4に内蔵された電池10の電池電圧に対応するデューティー比で制御される構成とする。
(もっと読む)
コンバイン
【課題】本発明は、コンバインの刈取部を自動制御で昇降するようにした構成で、自動で昇降させる範囲の設定を容易にすることを課題とする。
【解決手段】車台11の前部に昇降可能に設ける刈取前処理装置13の地上高を検出する刈取高さ検出手段2を設け、該刈取高さ検出手段2の検出する地上高に基づいて刈高さ制御処理装置38で刈取前処理装置13を制御下限位置から制御上限位置の範囲で昇降制御するコンバインにおいて、刈高さ制御処理装置38を調整記憶モードに切換えると、刈取前処理装置13の昇降移動率を監視し、昇降移動を一定時間停止した位置を制御下限位置と制御上限位置として記憶すべくしたことを特徴とするコンバインの刈取昇降制御装置とする。
(もっと読む)
コンバインの刈り高さ検出装置
【課題】コンバインの刈り高さ制御用の接地センサを、圃場に接地したまま機体を後進させても破損しないものとする。
【解決手段】刈取装置の下部にセンサ取付体(1)の前部を横軸(1a)で上下回動自在に軸支し、該センサ取付体(1)の後部に圃場面に接地する接地体(3)を縦軸(4)で左右回動自在に軸支し、該接地体(3)の接地によってセンサ取付体(1)が刈取装置に対して上下回動した角度を検出するセンサ(8)とする。また、接地体(3)を側面視で円弧状に湾曲した帯状体とし、該接地体(3)の接地点から後方の部位を圃場面から離間させる。また、接地体(3)の後部を簾状に切り欠く。
(もっと読む)
作業機
【課題】後進時に作業部の上昇操作によって機体を上昇させる作業機において、機体の動作状況をオペレータに直感的に把握させることができる構成を提供する。
【解決手段】作業機としてのコンバインが備える制御部は、主変速レバーの後進操作が検出されている場合において、刈取部が最上端位置にある状態で、刈取部昇降スイッチの上昇側操作が検出されると、機体昇降シリンダによって機体を上昇させる機体上昇制御を行う。そして、制御部は、この機体上昇制御とともに、ブザーによって機体の上昇を報知する。この状態で、主変速レバーが前進操作に切り替えられたことが検出されると、制御部は、機体の高さを所定位置まで下降させる機体下降制御を行うとともに、ブザーによって機体の下降を報知する。
(もっと読む)
コンバイン
【課題】本発明は、圃場の凹部を検知しても刈取前処理部を下降させないようにして刈取前処理部を確実に圃場面に突っ込むのを回避できるようにすることを目的とする。
【解決手段】刈高さ制御を行う制御手段を備えたコンバインにおいて、一方の刈高検出装置36により所定範囲から外れた高刈りの検出情報が検知されると、他方の刈高検出装置37による刈高さ制御に切り替え、刈取前処理部を上昇させる検出情報が検知されたときのみ刈取前処理部を上昇させる刈高さ制御を実行し、他方の刈高検出装置に基づいて刈高さ制御を実行しているときに一方の刈高検出装置36による検出情報が所定範囲内に戻ったときには、当該一方の刈高検出装置36のみの検出情報に基づいて刈高さ制御を実行する。
(もっと読む)
コンバイン
【課題】安価で、しかも刈取部の高さの制御が容易な掻込リールを装着したコンバインを提供することである。
【解決手段】機体の前側に配置した穀稈を刈り取る刈取部4の底部に設けた接地を検出する接地センサ40と刈取部4の対機体高さを検出する刈取高さセンサ66と刈取部4を機体に対して昇降自在に装着する昇降シリンダを備え、刈取部4の機体に対する高さを設定する刈取高さ設定ダイヤル52により設定された刈取部4の機体に対する高さに応じて接地センサ40と刈取高さセンサ66による検出値のいずれか一方に基づいて刈取部4の機体に対する高さの制御を行う制御装置60を設けたコンバインであり、刈取部4の機体に対する高さに応じて2つの高さセンサ40,66を使い分けることで制御操作が簡単となり、刈取部4の高さ制御のための部品点数が従来より少なくて済む。
(もっと読む)
コンバイン
【課題】単純な操作により自動昇降制御を行うために、刈取作業中に誤操作をしてしまい未刈り穀稈を踏み倒す可能性があった。
【解決手段】自動昇降指令する自動昇降操作手段(20)を設け、制御手段(21)は、自動昇降操作手段(20)の操作を入力中に前処理操作検出手段(22)による昇降操作レバー(11)操作を入力すると、前処理高さ検出手段(25)の入力に基づいて前処理部(5)が設定目標位置まで自動昇降するように、昇降駆動手段(4)を昇降操作レバー(11)の操作方向に駆動制御する。
(もっと読む)
園芸用バリカン
【課題】 シャーブレードのロックを解消可能であり、かつ、シャーブレードの再ロックが防止される園芸用バリカンを提供する。
【解決手段】 園芸用バリカンは、一対のシャーブレードと、少なくとも一方のシャーブレードを往復運動させるモータと、モータを制御する制御手段を備えている。この制御手段は、モータを正方向と逆方向の両方向に運転することができる。さらに、この制御手段は、逆方向への運転時におけるモータへの印加電圧を、正方向への運転時におけるモータへの印加電圧よりも、低くすることができる。
(もっと読む)
動力工具
【課題】スイッチ本体のオン・オフ操作が安全、かつ確実に行われるスイッチ機構を備えるとともに、スイッチ機構を小型化することでハウジングをコンパクトにし、小型化、軽量化された動力工具を提供する。
【解決手段】該スイッチ機構は、該第2スイッチレバーの操作によって該スイッチ本体をオンする方向に移動する可動軸と、該スイッチ本体と該第1スイッチレバーとの間に位置し、一端を該可動軸の先端に回動可能に軸支されたコンタクトレバーと、該コンタクトレバーの他端を該スイッチ本体をオンする方向に移動させる第1スイッチレバーと、該可動軸を常時下方に付勢する付勢部材とからなり、該第1スイッチレバーと該第2スイッチレバーの双方を操作したときにのみ該コンタクトレバーを介してスイッチ本体がオンすることを特徴とする。
(もっと読む)
自脱型コンバイン
【課題】本発明は、走行機体2の前部に昇降自在に備えた刈取り部3に、複数の分草フレーム36、分草具9、引起し装置10、刈取り装置、補助搬送装置12及び供給搬送装置13と、分草フレーム36に刈取り部の刈高さを検出する刈高さ検出装置37を備えた自脱型コンバインにおいて、補助搬送装置に穀稈の詰まりが発生した場合に詰まった穀稈の除去作業を容易に行えるようにするとともに、刈高さ検出装置の保守点検も容易に行えるようにすることにある。
【解決手段】刈高さ検出装置37を左右端の分草フレーム36から機体左右方向内側に隣接する分草フレーム36に取付け、刈高さ検出装置37よりも機体左右方向内側で、且つ右又は左の刈高さ検出装置37に隣接する引起し装置10を含む複数の引起し装置10を隣接する引起し装置10の間に位置する分草具9とともに持上げ可能に構成してある。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】圃場面の状況や刈取対象穀稈の植立状態等の作業状況の違いに応じて適切な刈取昇降制御を行うことにより、良好な刈取作業を行うことが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部における刈幅方向の異なる箇所に配備された複数の接地式の対地高さ検出手段及び目標対地高さ設定手段の情報に基づいて昇降操作手段を制御する刈取昇降制御を実行する制御手段が、手動操作式の制御モード切換指令手段の指令に基づいて、2個の対地高さ検出手段のいずれかが目標対地高さよりも低い値を検出すると刈取部を上昇させる少数検出時上昇処理モードと、全ての対地高さ検出手段が目標対地高さよりも低い値を検出すると刈取部を上昇させる多数検出時上昇処理モードとを切り換える。
(もっと読む)
コンバインの刈取昇降制御装置
【課題】刈取装置の点検や修理を行う際に、誤って刈取装置が下降してしまう不具合を少なくし、作業の安全性を高める。
【解決手段】走行車台(2)の前側に立毛穀稈を刈取り後方上部へ移送する刈取装置(4)を設け、該刈取装置(4)を昇降させる油圧シリンダ装置(7)を設け、該油圧シリンダ装置(7)への送油を電磁比例弁(8)で制御することにより刈取装置(4)の昇降速度を変更可能な構成とし、刈取ロック機構(9)によって該刈取装置(4)の下降を停止させる構成とし、該刈取ロック機構(9)のロック解除後に、最初の刈取下降操作時には下降出力を禁じ、主変速レバー(12)を停止位置へ操作するか又は該刈取装置(4)が上昇操作されたことを検出した後に、該刈取装置(4)の下降出力を許可する制御装置(13)を設ける。
(もっと読む)
刈取収穫機の刈取昇降制御装置
【課題】作業者の熟練度や作業状況の違い等に応じて適切な制御状態で昇降操作手段の作動を制御することが可能となる刈取収穫機の刈取昇降制御装置を提供する。
【解決手段】刈取部を昇降する昇降操作手段の作動を制御する制御手段Hが、自動制御処理を実行する制御モードとして、刈取部を上昇させる上昇処理及び刈取部を下降させる下降処理の夫々を実行する形態で昇降操作手段C1の作動を制御する自動昇降制御モードと、前記上昇処理及び前記下降処理のうちの前記上昇処理のみを実行する形態で昇降操作手段C1の作動を制御する自動上昇制御モードとを備えるように構成され、且つ、手動操作式のモード切換指令手段の切り換え指令に基づいて、前記自動昇降制御モードにて前記自動制御処理を実行する状態と、前記自動上昇制御モードにて前記自動制御処理を実行する状態とに切り換え自在に構成されている。
(もっと読む)
刈取収穫機の刈取部昇降構造
【課題】刈取収穫機の刈取部昇降構造において、例えば畦際での旋回が終了して刈取部を圃場面に下降させて次の刈取行程に入る場合、刈取部の先端部分が圃場面の凸部に突っ込むような状態を少なくする。
【解決手段】刈取部4を昇降駆動する昇降機構と、人為的に操作される昇降操作具とを備える。上方に設定された上昇限度UU1及び下方に設定された下降限度DD1の範囲において、昇降操作具の操作により昇降機構を上昇側及び下降側に作動操作、昇降操作具の操作により昇降機構を停止操作する制御手段を備える。制御手段の下降限度DD1を高低に変更する変更手段を備える。
(もっと読む)
1 - 20 / 45
[ Back to top ]