
Fターム[2F077DD16]の内容
感知要素の出力の伝達及び変換 (32,270) | 機械的手段による変換(伝達) (322) | ベルトを用いるもの (14)
Fターム[2F077DD16]に分類される特許
1 - 14 / 14
位置検出装置、位置検出方法及び撮像装置
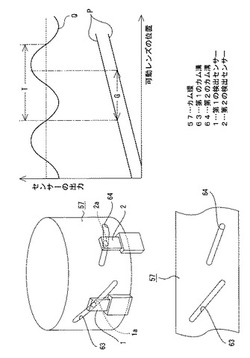
【課題】 小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行う。
【解決手段】 所定の方向へ動作され連続的に増加又は減少する信号を出力して光軸方向へ移動される可動レンズの絶対位置を検出する第1の検出センサーと、所定の方向へ動作され周期的かつ連続的に変化する信号を出力して前記可動レンズの相対位置を検出する第2の検出センサーとを設け、前記第1の検出センサーと前記第2の検出センサーを異なら動作速度で動作するようにした。
これにより、第2の検出センサーの着磁ピッチを大きくしたり、第1の検出センサーとしてリニアリティー誤差やヒステリシスの小さいものを用いる必要がなく、小型化及び製造コストの低減を図った上で高分解能で高精度な可動レンズの位置検出を行うことができる。
(もっと読む)
回転センサ

【課題】部品の寸法公差の累積に基づく寸法誤差や組付公差の影響、長年の使用による部品の変形による影響を受けることなく第1の回転体の回転数に対応する第2の回転体の回転角度を正確に検出する。
【解決手段】被測定回転体11に取り付けられこの回転と共に回転する第1の回転体10と、第1の回転体の回転角度を所定の角度範囲ごとに検出する第1の検出手段100と、第1の回転体と機構的に連結しこれと連動して回転し、かつ第1の回転体の回転数よりも減速した回転数で回転する第2の回転体20と、第2の回転体を所定の角度範囲ごとに検出する第2の検出手段200と、を有し、第1の回転体の回転角度を検出するときに、第1の検出手段の出力値が初期値付近の値であるか、終端値付近の値であるかを判断し、第1の検出手段の出力値から第2の検出手段の出力値に判断結果に応じた所定の補正処理を行う。
(もっと読む)
ベルト式無段変速機
【課題】レイアウト自由度の向上を図ることができるベルト式無段変速機を提供すること。
【解決手段】プーリ(セカンダリプーリ22)と一体に回転するトーンホイール(セカンダリ側トーンホイール25)と、このトーンホイール25と対向するセンサ(セカンダリプーリ回転数センサKS2)と、を有するプーリ回転を検出する回転状態検出装置を設けたベルト式無段変速機において、トーンホイール25は、可動プーリ(セカンダリ可動円錐板22b)の移動方向に沿って延在する円筒部25bを有し、この円筒部25bには、全周にわたって周方向に等間隔に配置されると共に、移動方向に沿って延在した複数の被検出部(長孔26)を設けた。
(もっと読む)
回転位置検出装置およびレーザ加工機
【課題】ドグの有無を検知するためのセンサからの信号のみを用いることで、360°以上の回転ストロークを有する回転軸の回転位置を検出すること。
【解決手段】原点センサ16cにてドグ20cが検知されるとともに、OT+センサ16aおよびOT−センサ16bにてドグ20a、20bがそれぞれ検知されない時に加工ヘッド13が原点位置にあると判別し、原点センサ16cにてドグ20cが検知されるとともに、OT−センサ16bにてドグ20bが検知されることなく、OT+センサ16aにてドグ20aが検知された時に加工ヘッド13が+360°だけ回転したと判別し、原点センサ16cにてドグ20cが検知されるとともに、OT+センサ16aにてドグ20aが検知されることなく、OT−センサ16bにてドグ20bが検知された時に加工ヘッド13が−360°だけ回転したと判別する。
(もっと読む)
回転検出器付き減速装置
【課題】減速装置の出力軸回転を高精度に且つ低コストで検出する。
【解決手段】出力ブロック(出力軸)48の回転を検出する機能を備えた回転検出器付き減速装置G1において、出力ブロック(出力軸)48と平行に配置された補助回転軸58と、出力ブロック48の回転を該補助回転軸58に伝達する回転伝達手段60と、補助回転軸58の回転を検出するエンコーダ(回転検出器)62とを備え、該エンコーダ62によって補助回転軸58の回転を検出することにより、出力ブロック48の回転を検出する。
(もっと読む)
磁気スケール付き無端ベルトの製造方法
【課題】良好な表面性を有する磁気スケールを無端ベルト上にシームレスに形成する方法を提供する。
【解決手段】ガイドロール31,32の間に張架された無端ベルト60を無端移動させながら、無端ベルト60に向けて磁性塗料70をスプレー塗布することにより、磁気スケール用の磁性層を無端ベルト60に形成する。磁性塗料70の固形分濃度は、15wt%以上25wt%以下であり、且つ150℃以上の沸点を有する高沸点溶剤の比率が磁性塗料70の溶剤全体に対して60wt%以上90wt%以下である。このような組成を有する磁性塗料70は、適度な磁性体の分散性と溶剤の乾燥性とを併有しており、微視的レベル及び目視レベルでの良好な表面性を併有する磁気スケールの形成に好適である。
(もっと読む)
磁気スケール付き無端ベルト及びその製造方法
【課題】良好な密着性及び表面性を有する磁気スケールを無端ベルト上にシームレスに形成する方法を提供する。
【解決手段】ガイドロール31,32の間に張架された無端ベルト60を無端移動させながら、下地層塗料を無端ベルト60に向けてスプレー塗布することにより、無端ベルト60に下地層を形成し、磁性塗料を下地層に向けてスプレー塗布することにより、磁気スケール用の磁性層を下地層上に形成する。無端ベルト表面及び磁性層との密着性に優れた下地層を無端ベルト表面に形成するので、磁気スケールの耐久性を向上できる。また、無端ベルト表面の微小な凹凸を下地層が吸収するので、表面性に優れた磁性層を形成することができる。
(もっと読む)
磁気スケール付き無端ベルトの製造方法、磁気式リニアエンコーダ、及び画像形成装置
【課題】磁気特性に優れた磁気スケールを無端ベルト上にシームレスに形成することのできる製造方法を提供する。
【解決手段】ガイドロール31,32の間に張架された無端ベルト60を無端移動させながら、磁性塗料70を無端ベルト60に向けてスプレー塗布することにより、磁気スケール用の磁性層を無端ベルト60に形成する。磁性塗料70の磁性粉比率を高めることにより、良好な磁気特性を有する磁性層を形成できる。また、磁性塗料70を螺旋状にスプレー塗布することにより、全周にわたって、シームレスで段差のない良質な塗膜を無端ベルト60に形成することができる。
(もっと読む)
ギヤ機構の回転角度誤差解析装置
【課題】供試ギヤ機構Gの回転特性を容易に評価する。
【解決手段】供試ギヤ機構Gの入力軸D1 、出力軸D2 に連結するエンコーダE1 、E2 の出力信号S1 、S2 を読み取るデータ収集手段11と、データ収集手段11によって収集したデータを記憶するメモリ手段12と、メモリ手段12から読み出したデータを加工処理し、供試ギヤ機構Gの正転時、逆転時の角度伝達誤差に基づくバックラッシを算出し、角度伝達誤差を周波数分析するデータ処理手段13とを設ける。
(もっと読む)
ロータリエンコーダ、ローラ部材、ベルト搬送装置、及び、画像形成装置
【課題】 コードホイールを薄肉化、小径化した場合であっても、ローラ部材の軸部に固設されるコードホイールに変形が生じることがなく、検知の信頼性が高いロータリエンコーダ、ローラ部材、ベルト搬送装置、及び、画像形成装置を提供する。
【解決手段】 この発明のロータリエンコーダは、ローラ部材47の軸部47bに圧入されて軸部47bとともに回動する支持部材71と、支持部材71に固設されて支持部材71とともに回動するコードホイール50と、を備える。このコードホイール50は、支持部材71が圧入される圧入領域Mから離れて支持部材71に固設される。
(もっと読む)
作動装置
【課題】 作動部材の位置を検出するインクリメンタルエンコーダの原点位置を速やかに検出し得、安価な作動装置を得る。
【解決手段】 電子部品保持装置移動装置を構成するX軸方向移動装置のX軸スライダの位置をインクリメンタルエンコーダにより検出し、X軸スライダ移動用モータのロータの回転位置をアブソリュートエンコーダにより検出し、電源投入時にインクリメンタルエンコーダの原点位置を取得する。そのため、インクリメンタルエンコーダの原点に対して予め定められた側に探索開始位置をアブソリュートエンコーダの出力値で設定し、アブソリュートエンコーダの出力値に基づいてX軸スライダを探索開始位置へ高速で移動させ、その後、低速で移動させつつ原点位置を探す。原点位置検出信号が得られれば、インクリメンタルエンコーダの出力値を0にセットする。
(もっと読む)
ロータリエンコーダ、ローラ部材、ベルト搬送装置、及び、画像形成装置
【課題】 トナー等の異物の付着による誤検知や異物の付着によるロッキング等の不具合の発生がなく、比較的低廉かつ比較的小型で、メンテナンス性に優れたロータリエンコーダ、ローラ部材、ベルト搬送装置、及び、画像形成装置を提供する。
【解決手段】 この発明のロータリエンコーダは、ローラ部材47の軸部47cに固設されてローラ部材47とともに回動する支持部材71と、支持部材71に固設されて支持部材71とともに回動するコードホイール50と、を備える。また、軸部47aに挿設される軸受74を介して軸部47a上に相対的に回動自在に支持されるとともに、支持部材71とともにコードホイール50を覆うカバー73を備える。さらに、カバー73内に設置されてコードホイール50の回動を検出するエンコーダセンサ51を備える。
(もっと読む)
回転角検出装置
【課題】 ギヤのバックラッシュの影響を排除して回転角検出装置の検出精度を高める。【解決手段】 回転角検出装置11は、ステアリングシャフト15の外周に設けた主プーリ14と、主プーリ14にコグベルト28を介して接続された第1、第2副プーリ20,25と、両副プーリ20,25の回転角をそれぞれ検出する第1、第2回転角センサ18,23とを備え、両回転角センサ18,23の出力に基づいてステアリングシャフト15の回転角を検出する。コグベルト28を用いたことにより、主プーリ14および第1、第2副プーリ20,25をギヤで連動させる場合に発生するバックラッシュの影響を受けることがなくなり、騒音の発生を抑制しながら3個のプーリ14,20,25の回転角を精度良く連動させることができる。しかも主プーリ14および第1、第2副プーリ20,25をギヤで連動させる場合に比べて、それら3個のプーリ14,20,25の配置の自由度が向上する。 (もっと読む)
回転角検出装置
【課題】 ギヤのバックラッシュの影響を排除して回転角検出装置の検出精度を高める。
【解決手段】 回転角検出装置11は、ステアリングシャフト15の外周に設けた主プーリ14と、主プーリ14にコグベルト21を介して接続された第1、第2副プーリ20A,20Bと、両副プーリ20A,20Bの回転角をそれぞれ検出する第1、第2回転角センサ18A,18Bとを備え、両回転角センサ18A,18Bの出力に基づいてステアリングシャフト15の回転角を検出する。コグベルト21を用いたことにより、主プーリ14および第1、第2副プーリ20A,20Bをギヤで連動させる場合に発生するバックラッシュの影響を受けることがなくなり、騒音の発生を抑制しながら3個のプーリ14,20A,20Bの回転角を精度良く連動させることができる。しかもコグベルト21にテンショナー22で張力を付与するので、コグベルト21の緩みを防止して回転角の検出精度を更に高めることができる。
(もっと読む)
1 - 14 / 14
[ Back to top ]