
Fターム[2H011BA35]の内容
焦点調節 (10,117) | 焦点検出(測距)方式 (3,703) | 像鮮鋭度検出方式 (2,037) | 機械的走査によるもの (14)
Fターム[2H011BA35]に分類される特許
1 - 14 / 14
撮像装置、撮像装置の制御方法、プログラム
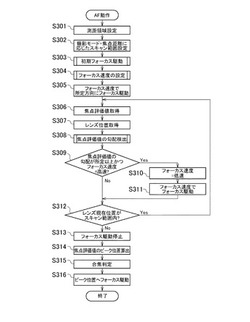
【課題】焦点検出手段の動作開始前、または焦点検出手段の動作中に、焦点評価値の形状による速度制御を行うかどうかを判断することで、高速AF制御の精度を向上させる。
【解決手段】被写体からの光を光電変換して撮像信号を生成する撮像素子107と、前記撮像信号から被写体のコントラストを示す焦点評価値を生成し、当該焦点評価値に基づいてフォーカスレンズ104の駆動を制御するシステム制御部113を備えた撮像装置であって、前記システム制御部113は、所定の条件を満たす場合に、前記焦点信号の形状に基づいて前記フォーカスレンズ104の駆動速度を可変にし、前記所定の条件を満たさない場合、前記フォーカスレンズ104の駆動速度を可変にしない。
(もっと読む)
撮像装置

【課題】シャッタチャンスを逃さずに、また全体としての撮影時間も少なくしつつ、ユーザが所望の合焦状態の画像を得ることができる撮像装置を提供すること。
【解決手段】ユーザによるレリーズ指示を受けて、CPU101は、撮影時の被写体を判断し、判断した被写体に応じて撮像部102等の撮影パラメータ、並びにフォーカスレンズのスキャン範囲及びスキャン方向を設定する。その後、CPU101は、フォーカスレンズの駆動と同期するように撮像部102を連続動作させる。合焦評価部111は、撮像部102を介して得られた画像データの合焦状態を評価し、この評価結果に応じて画像データ及び合焦画像情報を記憶させる。撮影終了後に、CPU101は、合焦画像情報に従って、マルチフォーカス画像を表示部108に表示させる。ユーザは、表示部108に表示されたマルチフォーカス画像に対して種々の処理を行うことが可能である。
(もっと読む)
複眼カメラおよびこれを用いた連続自動合焦制御方法、制御プログラム、可読記憶媒体
【課題】単眼モードで連続AFを使用した撮影を行う場合に、AFのレスポンス向上を図ることができて、画質を向上させる。
【解決手段】第1撮像部11でフォーカス制御を行って合焦させた時点から連続的に合焦させる際に、第2撮像部12のレンズ位置を所定量Dだけ前方または後方のいずれかに合焦状態からずらした状態で、第1撮像部11からのデータ量と第2撮像部12からのデータ量の相関関係に基づいて、第1撮像部11のレンズ駆動方向を決定してフォーカス制御を行うフォーカス用データ処理部61を有している。
(もっと読む)
レンズ鏡筒
【課題】カメラ本体が駆動速度を直接指定する必要なく好適にフォーカシングレンズを駆動することが可能なレンズ鏡筒を提供する。
【解決手段】カメラボディから、所定の像面移動速度でフォーカシングレンズを駆動するように指令する第1駆動信号と、静音モード指令信号とを受信する受信部と、フォーカシングレンズを駆動する駆動部と、第1駆動信号に応じて、結像光学系の結像面が所定の像面移動速度で移動するように駆動部を制御する制御部と、受信部により静音モード指令信号が受信された場合に、所定の像面移動速度を達成するために必要なフォーカシングレンズの駆動速度が所定の上限速度を超えるか否かを判定する上限判定部とを備え、制御部は、上限判定部によりフォーカシングレンズの駆動速度が所定の上限速度を超えると判定された場合には、フォーカシングレンズが所定の上限速度以下の第1駆動速度で駆動されるように駆動部を制御するレンズ鏡筒。
(もっと読む)
撮像装置、撮像方法、及び撮像プログラム
【課題】オートフォーカス時間を短縮させる。
【解決手段】被写体を撮像する撮像素子を含む撮像手段と、前記撮像手段に含まれる光学系を駆動させて、前記被写体の像を前記撮像素子の受光部に合焦させて合焦制御を行う合焦制御手段と、前記光学系及び前記撮像素子により得られる画像の視差を用いて前記被写体までの距離の測定を行う測距手段と、前記測距手段により測定された距離の位置から所定距離だけ離れた位置にフォーカス位置を移動させる合焦位置移動制御手段とを有することにより、上記課題を解決する。
(もっと読む)
立体撮影装置および撮影制御方法
【課題】平面画像および立体画像をそれぞれ適切な撮影条件で撮影することができるとともに、平面画像と立体画像とのタイムラグを低減すること。
【解決手段】平面画像の撮影範囲に対応する露出量EVAと立体画像の撮影範囲に対応する露出量EVBとの差分(露出量差)を△EVとしたとき、△EV≦閾値である場合には、撮影範囲が小さい方の画像に対応する露出量を用いると判定し、△EV>閾値である場合には、EVA、EVBをそれぞれ用いると判定する撮影条件判定部75と、露出量以外の撮影条件の差分が許容範囲内であって、△EV≦閾値である場合には、平面画像および立体画像の両方を一回の露出で取得し、△EV>閾値である場合には、小さい方の露出量で露出を行って第1の撮像画像を生成するとともに、△EVで露出を行って第2の撮像画像を生成し、画像合成部77により前記第1の撮像画像と前記第2の撮像画像とを合成する撮影制御部76を備えた。
(もっと読む)
オートフォーカスの駆動制御方法
【課題】沈胴式撮像装置において、オートフォーカス制御における合焦時間を短縮する。
【解決手段】撮影時、被写体に向けて沈胴式コンパクトデジタルカメラを構え、電源を投入するとカメラが起動し、レンズ鏡筒が被写体側に向けて繰り出される。このとき、カメラ本体内に配設されているフォーカシング用鏡枠はカメラ本体内の沈胴位置から至近位置まで移動し、そして、至近位置から無限遠位置に移動してから、カメラは撮影可能状態になる。この至近位置から無限遠位置にフォーカシング用鏡枠が移動するときに撮影範囲全域をスキャンするため、オートフォーカス制御による合焦点をスキャンする時間が短縮される。これにより、カメラを起動してから撮影するまでの時間が短縮される。
(もっと読む)
カメラモジュール
【課題】位置検出を行なわなくても精度よくフォーカス制御を行なうことが可能なカメラモジュールを提供すること。
【解決手段】アクチュエータ6は、圧電素子を伸縮させることにより、圧電素子に固着された駆動部に対して摩擦係合される移動体を移動させて、移動体に連結された光学系1を駆動する。フォーカス評価部3は、撮像素子2によって得られた画像のフォーカスを評価する。アクチュエータ制御部4は、単位駆動量aずつアクチュエータ6を駆動しながらフォーカス評価部3にフォーカスの評価を行なわせ、累計駆動量Pamaxとなってもフォーカス点が得られない場合には、単位駆動量aよりも大きい単位駆動量bずつアクチュエータ6を駆動しながらフォーカス評価部3にフォーカスの評価を行なわせる。したがって、位置検出を行なわなくても精度よくフォーカス制御を行なうことが可能となる。
(もっと読む)
焦点調節装置を備えたカメラ
【課題】。
【解決手段】近距離合焦端と遠距離合焦端の間において、焦点調節レンズ群を光軸に沿って移動しながら前記焦点調節レンズ群を含む撮像光学系により形成された被写体像を撮像手段により撮像し、複数位置において取得した画像信号に基づいて合焦位置を検出する合焦サーチを実行し、該合焦サーチにより検出した合焦位置に前記焦点調節レンズ群を移動する焦点調節手段と、前記撮像手段により撮像した画像信号に基づいて顔画像を検出する顔検出手段とを備え、前記焦点調節手段は、前記顔検出手段が顔画像を検出したときは、その顔画像の大きさが、所定しきい値未満のときは遠距離合焦端側から合焦サーチし、所定しきい値以上のときは近距離合焦端側から合焦サーチする。
(もっと読む)
撮像装置、撮像方法、およびプログラム
【課題】オートフォーカス時のウォブリングモードに起因する画像の劣化を抑止する。
【解決手段】動作判定部41は、ユーザによるパンニング操作、チルティング操作、あるいはズーミング操作を検出する。評価値取得部42は、合焦の程度を示す評価値のノイズを除去して所定の期間だけ蓄積し、蓄積した評価値に基づいて遠近評価値変化量および近遠評価値変化量を算出する。被写界深度演算部43は被写界深度を演算する。ウォブリング幅決定部44は、遠近評価値変化量および近遠評価値変化量に基づいてウォブリング幅を抑制するか否か判定し、抑制しない場合は被写界深度の1/2程度、抑制する場合は被写界深度の1/4程度に対応する幅にウォブリング幅を決定する。AF制御部45は、決定されたウォブリング幅でウォブリングさせる。本発明は、ビデオカメラに適用することができる。
(もっと読む)
駆動制御装置及び駆動制御方法
【課題】レンズの焦点合わせ動作での固定駆動パルス数に基づくエラー対応処理における精度を向上させる。
【解決手段】所定方向に沿った圧電素子12の伸び速度と縮み速度とを異ならせるよう駆動パルスの供給を制御して圧電素子12を伸縮させることで駆動棒17を振動させ、駆動棒17に摩擦係合したレンズ21を所定方向に沿って移動させる駆動制御装置20において、焦点合わせ動作前に、所定移動距離だけレンズ21を移動させるに要した実駆動パルス数を測定する実駆動パルス数測定手段32と、実駆動パルス数と基準パルス数とに基づいて駆動パルス数に関する補正係数を算出する補正係数算出手段33と、測定されたAF評価値(コントラスト値)が最大となるレンズ21の位置を検出できなかった場合、予め設定された固定駆動パルス数を、上記算出された補正係数に基づいて補正する補正手段37とを備えた。
(もっと読む)
駆動制御装置及び駆動制御方法
【課題】低輝度時や低コントラスト時のような測距が困難な場合でも、被写体の輝度に応じて行うべき、撮影のための適切な更なる設定を実現する。
【解決手段】圧電素子12の伸び速度と縮み速度とを異ならせるよう駆動パルスの供給を制御して圧電素子12を伸縮させることでレンズ21を所定方向に沿って移動させる駆動制御装置20において、被写体の輝度を計測する測光手段31と、輝度が規定数値範囲の範囲内である場合に、固定焦点閾値を算出する閾値算出手段32と、レンズ21を駆動方向に移動させながらAF評価値を測定するAF評価値測定手段33と、輝度が規定数値範囲の範囲外である場合、又は、AF評価値の高低差が固定焦点閾値未満である場合に、レンズ21を固定焦点位置へ移動させる固定移動制御手段34とを備える。
(もっと読む)
撮像装置、合焦移置検出方法、及び情報処理装置が読み取り可能な記憶媒体
【課題】 合焦精度を確保しながら合焦時間を短縮することができる合焦装置及び合焦方法を提供する。
【解決手段】 ステップS1において粗いステップでのサーチを行う。そして、ステップS2において、細かいステップでのサーチが必要か否かを判定する。ステップS3において、細かいステップでのサーチが必要な場合にはステップS4へ、必要でない場合にはステップS6へ進む。ステップS4に進んだ場合、粗いステップの極大値付近を細かいステップでサーチを行い、ステップS5において、細かいステップでのサーチの結果、得られたAF評価値に基づいて合焦位置を決定する。一方、ステップS6に進んだ場合は、粗いステップでのサーチの結果、得られたAF評価値に基づいて合焦位置を決定する。そして、ステップS7において合焦位置にフォーカスレンズを駆動することにより、合焦状態を得る。
(もっと読む)
デジタルカメラ
【課題】 人物撮影における合焦時間(合焦までに要する時間)の短縮を図る。
【解決手段】 撮像によって得られた画像信号を解析して画像内の人物の顔を認識し、顔が認識された場合に、その顔エリアのサイズに基づいて顔までの概略距離を求め、求められた距離に基づいて、AFサーチの開始点となる合焦レンズ位置Lsを決定する。LsからAFサーチを開始することで、無限遠端Liから開始するよりも短時間でL0のピーク(顔に合焦するレンズ位置)が検出でき、以て人物撮影における合焦時間を短縮できる。
(もっと読む)
1 - 14 / 14
[ Back to top ]