
Fターム[3C007HT02]の内容
マニピュレータ、ロボット (46,145) | 伝動装置(挟持装置は除く) (1,840) | 可撓性部材 (556) | ベルト (274)
Fターム[3C007HT02]に分類される特許
201 - 220 / 274
産業用ロボット
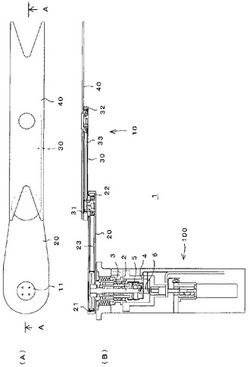
【課題】アーム旋回量に制限のない低コストの産業ロボットを提供する。
【解決手段】本体部側から第1アーム20、第2アーム30及びハンドアーム40の順で連結され、そのハンドアーム40が一定方向に伸縮するように回動駆動するアーム部10と、そのアーム部10の伸縮動作を行う中空回動軸3及びこの中空回動軸3内にあって前記第1アーム10に連結して前記ハンドアーム40の伸縮方向を変化させる中実回動軸2を備えた本体部100とを有し、本体部100は、中実回動軸2の原点位置を検出する第1センサ4を有する第1センサ機構と、その中実回動軸2に設けられて中実回動軸2と中空回動軸3との相対的な原点位置を検出する第2センサ5を有する第2センサ機構とを有しており、中実回動軸2には、ロータリージョイント6が電気接続され、第2センサ5がこのロータリージョイント6に接続されている。
(もっと読む)
関節装置、関節装置を用いたフィンガーユニット、及び、ユニバーサルロボットハンド

【課題】人の指のごとき微妙な動作を実現することが可能な関節装置、関節装置を用いたロボットフィンガー、及び、ユニバーサルロボットハンドを提供する。
【解決手段】一方のリンク部材Lに固定したフレクスプライン7と、その回転軸心Pと交差する方向に延出形成した薄肉部8aを他方のリンク部材Lに固定したサーキュラスプライン8とを備えてなるハーモニックドライブHを前記関節部材Jに組み込み、基端側リンク部材Lに収容したモータMの出力を基端側のウェーブジェネレータ6に伝達する第一の伝動機構T1と、前記モータMの出力を前記第一の伝動機構T1及び前記基端側リンク部材Lに隣接するリンク部材Lに収容した伝達シャフトSを介して前記基端側のウェーブジェネレータ6に隣接するウェーブジェネレータ6に伝達する第二の伝動機構T2を備える。
(もっと読む)
ロボットアーム及びロボット
【課題】減圧雰囲気下で内部から出る粉塵等を少なくすると共に、高さ方向の厚さの増大を抑えたロボットアーム、及びそのロボットアームを備えたロボットを提供する。
【解決手段】ロボット本体の基台200に第1プーリ21(第1伝達機構)を介して回動可能に取り付けられた第1アーム20と、第1アーム20の先端部に第2プーリ22(第2伝達機構)を介して回動可能に取り付けられた作業アーム50と、第1プーリ21及び第2プーリ22を連結して動力を伝達する第1ベルト23(第1連結手段)とを少なくとも備えるロボットアームにおいて、第1ベルト23をフッ素ゴムからなるものとする。
(もっと読む)
多関節型ロボット
【課題】大きな駆動力を発生する高価なモータを用いることなく、簡易な制御によって、半導体ウェハなどのワークを安定に搬送することが可能な多関節型ロボットを提供する。また、作業場所の省スペース化に資する多関節型ロボットを提供する。
【解決手段】多関節型ロボット1に、ワーク30を保持するハンド部7と、ハンド部7を回転可能に保持するアーム部6と、アーム部6の基端側を回転可能に保持するとともに、アーム部6の基端側の移動軌跡が、ワーク30をロード等する方向とはほぼ直交する方向の略直線となるように動作するリンク機構3と、アーム部6を、リンク機構3の移動に整合させてワーク30をロード等する方向に直線補間するように移動させる駆動手段と、を設け、基台側リンク部4の長さは、アーム部側リンク部5の長さよりも長く形成され、リンク機構3の基台2は、その中心位置がアーム部の基端側の移動軌跡上からずれた状態で配置されている。
(もっと読む)
平行保持機構
【課題】リンクの干渉を避け、比較的大きい作業領域を確保することができ、部品点数が少なく組立が容易であり製作コストを減少することができる平行保持機構を提供する。
【解決手段】平行保持機構10は、回転ジョイント22aが固定され所定長dの直径を有するプーリー12aと、回転ジョイント22bが回転ジョイント22aに対して平行を保持する位置に固定され直径dを有するプーリー12bと、両プーリーを各々回転自在な状態で接続したリンク14と両プーリーを繋ぎ且つ両プーリーを同期して回転させるタイミングベルト16とを備えている。固定された状態で両回転ジョイントの長手方向は相互に平行となっている。タイミングベルト16により両プーリーが回転すると、両回転ジョイント長手方向はyz平面内で常に平行となるため平行リンク機構の動きと同様の動きを実現できる。3自由度の空間並進平行保持機構30には平行保持機構10を用いる。
(もっと読む)
平行リンク機構及び産業用ロボット
【課題】駆動モータを中空モータにする必要がなく、容易に内部配線を構成することができ、組み付けが容易となる平行リンク機構及び産業用ロボットを提供することにある。
【解決手段】下端部を固定ベース2に回転可能に連結し、上端部を波動歯車減速機20の本体カバーKに連結した第1アーム3と、下端部を波動歯車減速機20の第2出力軸に、上端部を可動ベース40に回転可能に連結した第2アーム30と、を備えている。また、第1アーム3及び第2アーム30よりも外側(左側)に設けられ、波動歯車減速機20の第1出力軸に連結された連結ベース50を備えている。また、第1アーム3の下端部には、駆動モータ10が、モータ軸の中心軸線M1を第1連結軸5の中心軸線L1から上側に偏倚するように固着されている。
(もっと読む)
ダブルアーム列式基板搬送用ロボット
【課題】 モータの必要台数を減らし、構造を簡単化、小型化、軽量化して、製作コストを低減することを可能にしたダブルアーム列式基板搬送用ロボットを提供する。
【解決手段】 アーム伸縮機構A、Bが左右に2列備えられ、最終段アームとなる第2アーム107、107’の先端にはハンド110、110’が結節されて設けられ、第1アーム105、105’を位相差を持って正逆回転させることにより、ハンド110、110’が位相差を持って直線運動するように構成されて成るダブルアーム列式基板搬送用ロボット101が、アーム駆動手段160をさらに備えている。アーム駆動手段160は、第1アーム105、105’に備えられる第1の永久磁石167、167’に対応させて、第2の永久磁石162、162’を有し、これが正逆回転することにより、これらの永久磁石の磁気結合を介して第1アーム105、105’が位相差を持って正逆回転する。
(もっと読む)
脚車輪型移動ロボット、その動作方法及びプログラム
【課題】ロボット内部に過大な応力を発生させずに姿勢変更動作を高ゲインの局所位置フィードバック制御により行うことができる脚車輪型移動ロボット、その動作方法及びプログラムを提供する。
【解決手段】本体1と、本体1に回動可能に連結されかつ伸縮又は折り曲げ可能な複数の脚3、5と、複数の脚3、5のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を回転移動する車輪9と、車輪9の回転を制動するブレーキと、を有する脚車輪型移動ロボット10において、駆動モータを制御し本体1の姿勢を変化させる時に、複数の脚3、5の少なくともいずれかのブレーキを非作動にし、車輪9が回転移動可能となった該脚から、本体1の姿勢変化によってロボット内部に蓄積される応力を外部に解放する。
(もっと読む)
上下機構を備えた搬送ロボット
【課題】液晶などの搬送ロボットにおいて、剛性を向上させた上下機構を提供することよって、ロボットの倒れを防止できるようにする。また、剛性を向上させることにより、上下機構の加減速時間を短縮することで、ロボットのサイクルタイムを減少させる
【解決手段】上下機構には、水平方向に延在するベースアームと、その両端部に鉛直方向に立設された2本の上下軸アームと、2本の上下軸アームの各々に設けられた上下案内手段と、からなる複数の上下軸スライダ17、18、19を設けると共に、複数の上下軸スライダは、各々のベースアームの両端部が、他の上下軸スライダの上下案内手段に順次接続され、ベースアームには、前記2本の上下軸アームの各々に設けられた上下案内手段を駆動する駆動手段を設けた。
(もっと読む)
脚車輪型移動ロボット及びその動作方法
【課題】脚先端部の構成を複雑にすることなく、脚が接地面に着地した時に受ける衝撃荷重の水平成分を緩和することができる脚車輪型移動ロボット及びその動作方法を提供する。
【解決手段】本体1と、交互に進行方向に振り出され歩行できるように、水平軸心を中心に回動可能に本体に連結され伸縮又は折り曲げ可能な複数の脚3、5と、該複数の脚のそれぞれに対し回動動作と伸縮又は折り曲げ動作を行わせる複数の駆動モータと、を備え、前記各脚3、5は、接地面に接触するように脚先端に取り付けられ接地面上を転動する車輪9と、該車輪の回転を制動する制動装置と、を有する脚車輪型移動ロボット10において、脚3、5の着地時にその車輪9が回転自在となっているように、前記脚3、5が接地面に着地する前に、前記脚の制動装置を非作動にする。
(もっと読む)
脚車輪型移動ロボットとその階段歩行方法
【課題】 歩行中の足底のすべり、歩幅の誤差、階段そのものの幾何学的な誤差の影響を受けずに、一定の歩幅を維持して、多数の階段を安定に歩行することができる脚車輪型移動ロボットとその階段歩行方法を提供する。
【解決手段】 伸縮又は折曲げ可能な複数の支持脚14、16を立脚および遊脚として交互に振り出して歩行し、かつ支持脚の下端に設けられた足首・車輪駆動部18の車輪21で平坦地を走行する脚車輪型移動ロボット10の階段歩行方法。階段を上下する一歩毎又は数歩毎に、次の歩行に適した所定の位置まで、足首・車輪駆動部18で並進移動する補正期を有する。
(もっと読む)
搬送装置
【課題】クリーンプロセスにおける真空雰囲気下で熱の影響に耐えうる板状ワークの搬送装置を提供する。
【解決手段】搬送装置A1は、固定ベース1と、固定ベース1に対して旋回可能に保持された旋回ベース2と、この旋回ベース2に対して揺動可能に支持されたリンクアーム機構3と、リンクアーム機構3に支持されたハンド4とを備え、旋回ベース2およびリンクアーム機構3の動作に伴いハンド4でワークを水平に保持しながら搬送するものである。旋回ベース2と固定ベース1との間には、気密シール23Aが設けられているとともに、固定ベース1および旋回ベース2には、冷媒循環路が設けられており、この冷媒循環路の一部は、気密シール23Aの近傍に配置されている一方、冷媒循環路は、固定ベース1と旋回ベース2との境界に形成した環状空間110A,210Aを含んで構成される。
(もっと読む)
産業用ロボットのアーム機構
【課題】プーリ軸の剛性とプーリの取付強度を高め、アームの動作安定性を格段に向上できるようにした産業用ロボットのアーム機構を提供する。
【解決手段】産業用ロボットのアーム機構20を支持する固定部21と、固定部20に一端部が回動自在に連結された第1のアーム22と、この第1アーム22の他端部に回動自在に連結され、第1アームと同一のアーム長を有する第2のアーム23と、駆動モータの回転を前記第1アームに減速して伝達する減速機24と、第2アーム23の先端部が直線上を運動するように第1アーム22に連動させて第2アーム23を回動させる倍速伝達機構と、を備えたアーム機構20において、倍速伝達機構の駆動側の回転伝動要素30を、固定部20と一体でかつ減速機25を内包する中空構造部33に取り付ける。
(もっと読む)
基板搬送装置
【課題】 半導体や液晶パネルの製造工程における基板搬送を簡易な構造で、迅速かつ高精度で行えるようにする。
【解決手段】 第1スライダ20と第2スライダ30とが同期をとって伸長するリニアスライダ10が収容される際、第1スライダ10はベースハウジング11内に完全に収容され、第2スライダ30は収容状態の第1スライダ20上まで縮退する。一方、第1スライダ10は、ベースハウジング11内に設けられた1対のプーリ間に掛け渡されたベルトBの一部に固定された保持プレート22によって、ベルトBの走行方向に移動して伸縮するとともに、第2スライダ30は、両端部がベースハウジング11内の保持プレート22に軸支された1対の従動プーリ23,24ととの間に掛け渡されたワイヤ18の一部に固定された部位を介して第1スライダ20の伸縮と同期してスライドする。
(もっと読む)
部品装着方法
【課題】従来に比べて部品装着時間の短縮を図ることができる部品装着方法を提供する。
【解決手段】スプラインシャフト13の他端部13bにて空気通路27に接続される第1ブロー装置106にて上記空気通路内を大気圧状態に復帰させ、上記スプラインシャフトの一端部13aの近傍にて上記空気通路に接続される第2ブロー装置107にて上記空気通路内を大気圧状態に復帰させる。これにより上記空気通路内の真空圧を大気圧に復帰させるために要する時間を従来よりも短縮することができる。
(もっと読む)
関節構造の駆動機構
【課題】 部品点数の削減により構造を簡素化するとともに、慣性を小さく抑えて起動トルクを軽減させることにより、低出力駆動源の使用によってコストを削減し、さらに、放熱面積の拡大によって摩擦熱を積極的に放熱して冷却することで耐久性を向上させることができる関節構造の駆動機構を提供する。
【解決手段】 駆動源20の作動により、出力回転軸21を回転させ、これに伴なって第1アーム22を旋回させるとともに、動力伝達機構30によって第1関節軸23を逆方向に回転させ、かつ、第2アーム24を第1アーム22の逆方向に旋回させる関節構造の駆動機構において、動力伝達機構30を、第1プーリ32と、第2プーリ34およびこれら第1,第2プーリ32,34に掛け渡されるタイミングベルト38Aによって構成し、第1プーリ32は駆動源20側に固定し、かつ、中心部に出力回転軸21を回転自在に挿通してある。
(もっと読む)
産業用ロボット
【課題】 複雑な制御を何ら必要とせず、また、駆動軸を増やすことなく、ロボットのアーム先端のエンドエフェクタの向きを常に一定になるようにする。
【解決手段】 本発明の産業用ロボットは、最上位の位置に配置されるベース部11と、ベース部11から下方に垂設される水平多関節アーム12と、水平多関節アーム12の先端部に設けられる上下方向に移動自在な上下アーム18と、上下アーム18の下端部に連結されエンドエフェクタ22を有する手首部20と、を有し、さらにエンドエフェクタ22の向きを水平関節アーム12の回動に連動して一定の方向に保持する平行リンク機構を備えている。
(もっと読む)
産業用ロボット
【課題】 多関節アームを駆動するとき負荷を低減し、モータ容量の縮小化を図り、省エネルギの産業用ロボットを提供する。
【解決手段】 ロボットの各制御軸を駆動するモータが集中配置されるベース部11を最上位の位置に配置し、ベース部11から水平多関節アーム12を垂設し、上下方向に移動自在な上下アーム18を水平多関節アーム12の先端部に設け、上下アーム18の下端部にエンドエフェクタ22を有する手首部20を設ける。
(もっと読む)
産業用ロボット
【課題】アーム先端重量を軽量化してモータ容量の縮小化を図りかつモータや伝動機構のメンテナンス性を高めさらに部品コストの低減化を図る。
【解決手段】第1軸乃至第4軸駆動用モータからなるモータユニットを備えたベース部11と、第1軸を中心にベース部よりも下位にある水平面上を回動する第1アーム14と、第1アームの先端部で第2軸を中心に第1アームの下位にある水平面上を回動する第2アーム16とからなる水平アーム12と、ベース部と第1アームを連結する関節部に設けられる第1の減速機34と、第1アームと第2アームの関節部に設けられる第2の減速機35と、手首部20を上下方向に昇降させる第3軸たるボールねじ機構と、手首部を揺動させる第4軸たる揺動機構を具備する上下アーム18と、第1減速機と第2減速機の各々に同軸の多重中空軸ユニットとベルト伝動ユニットの組合せからなり、第2軸乃至第4軸の各軸に動力を伝動する伝動ユニットを具備する。
(もっと読む)
塗装ロボット
【課題】 駆動モータを防爆型のモータを必要とせず、しかも、モータ容量を低減化できるようにする。
【解決手段】 塗装ロボットの各軸を駆動するモータをベース部11に集中配置し、ベース部が設置される空間と、ロボット本体が設置され塗装工程を行う作業空間との間を仕切壁24で隔絶する。
(もっと読む)
201 - 220 / 274
[ Back to top ]