
Fターム[3C007JS06]の内容
マニピュレータ、ロボット (46,145) | 制御装置の具体的構成 (854) | 機構部との配置関係 (76)
Fターム[3C007JS06]に分類される特許
1 - 20 / 76
多関節ロボット
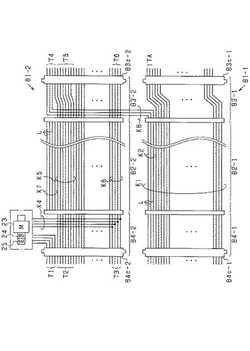
【課題】複数の関節アクチュエータでの配線構造の共通化を図り、しかも自己の電源ノイズによる制御系への悪影響を抑制する。
【解決手段】関節アクチュエータの配線モジュールにおいて、入力側コネクタ84c−2には全アクチュエータ共通の分配用端子T1が設けられ、出力側コネクタ83c−2には全アクチュエータ共通の次段電力用端子4が設けられている。また、配線モジュールにおいて、電源線配列部K1で信号線K6から最も離れた位置にある次段用電源線K2を次段電力用端子T4に接続すること、及び、電源線配列部K1の残りの電源線を、1関節アクチュエータ分の電源線の分ずつ信号線K6から離れる側にずらして出力側コネクタ83c−1に接続することにより、電源線の配列が組み替えられている。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法

【課題】高精度の位置決めを容易に行うこと。
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
ロボット、ロボットシステムおよび回転電機
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
水平多関節ロボット
【課題】角速度センサーを用いて制振制御を行う水平多関節ロボットにおいて、該角速度センサーに接続される電気配線の耐久性を高めることの可能な水平多関節ロボットを提供する。
【解決手段】ロボット10は、第2水平アーム15に設置され基台11に対する第1水平アーム12の角速度を得るための角速度センサー30を備え、第1水平アーム12の角速度に基づく第1モーター13の駆動によって第1水平アーム12を制振する。ロボット10は、基台11と第2水平アーム15とに端部が連結されるとともに、第1水平アーム12の外側、且つ第2水平アーム15の外側に配設されて、基台11内と第2水平アーム15内とに通じる通路を有する配線ダクト33に、第2水平アーム15に内蔵された第2モーター16に接続される電気配線35と、角速度センサー30に接続される電気配線36とが引き回されている。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
多指ハンドユニットおよびロボット
【課題】骨格フレームの曲げ剛性およびリンク部の収納スペースを維持しながらリンク部の小型化を図ることが可能な多指ハンドユニットを提供する。
【解決手段】この多指ハンドユニット1は、複数の指部10、20および30を備え、少なくとも指部10は、内部に収納部141dが配置される中空の骨格フレーム141を有する根元リンク部14と、根元リンク部14を回動させる関節駆動部11とを含む。
(もっと読む)
チャック装置
【課題】制御部においてワークの把持が誤って認識されることを簡単な構成にて防止する。
【解決手段】チャック装置5は、爪部62を、待機位置から把持位置へと向かう方向へ連続的に移動することによりワークを把持する把持部50を備え、把持部50には把持検出部51および判定回路52が取り付けられる。把持検出部51では、爪部62の待機位置からの移動において、爪部62が把持位置に到達した時にON信号が出力され、万一、把持位置を超えた場合にON信号の出力が停止される。判定回路52では、把持検出部51からのON信号の入力が所定時間継続した場合にのみ、ワークの把持を示す把持信号が外部の制御部12に向けて出力される。これにより、ワークが把持されていないにもかかわらず、爪部62が把持位置を通過する際に発生するON信号に起因して、制御部12においてワークの把持が誤って認識されることを、簡単な構成にて防止することができる。
(もっと読む)
リンク式ロボットアーム装置
【課題】アームの制御性低下を効果的に抑制するとともに、吸着ON・OFF状態の切替応答性が向上するリンク式ロボットアーム装置を提供する。
【解決手段】アームの先端側に配置され且つ吸着用エア供給口C3を有するエンドエフェクタCによって搬送対象物を吸着保持可能なリンク式ロボットアーム装置Xとして、アーム1の内部に設けたエア管4を介して吸着用エア供給口C3に接続され、吸着用エア供給口C3に吸着用エアを供給可能な状態と、吸着用エア供給口C3への吸着用エア供給を停止する状態との間で切替可能な吸着切替ユニット3を備え、この吸着切替ユニット3を、アーム1のうちアーム長1Lの半分1Cよりもシータ軸J3に近い位置に設けた。
(もっと読む)
アクチュエータ及びアクチュエータシステム
【課題】コントローラの配置位置にかかわらず、ティーチングを容易に行うことを可能とするアクチュエータ及びアクチュエータシステムを提供する。
【解決手段】アクチュエータシステムAは、アクチュエータ10と、アクチュエータ10を制御するためのコントローラ20と、アクチュエータ10のプログラムを作成するためのティーチングを行うティーチングペンダント30と、を有する。そして、アクチュエータ10は、コントローラ20と、ティーチングペンダント30と、を接続する中継ユニット11を備える。これにより、アクチュエータ10から離れた位置に、コントローラ20が配置されている場合においても、作業者は、アクチュエータ10の動作を目視しやすい位置で、ティーチングを行うことができるようになる。
(もっと読む)
信号送受信装置
【課題】安価かつ簡易な構成で、安定した動作を可能とする歩行補助装置用の信号送受信装置を提供する。
【解決手段】本発明は、歩行補助装置を制御するために、信号を送受信する信号送受信装置であって、人体に接触可能な送信電極と、前記送信電極が前記人体に接触された場合に信号を送信する信号送信手段と、を有する送信部と、前記人体に接触可能な受信電極と、前記信号送信手段から送信された前記信号が前記受信電極を介して受信される信号受信手段と、を有する受信部と、を備え、前記送信電極と前記信号送信手段とは、所定距離以上離れていることを特徴とする。
(もっと読む)
マニピュレータ及びマニピュレータの制御方法
【課題】本発明は、小型な駆動部を有するマニピュレータを、または複数の構造物が存在する狭隘部へマニピュレータを挿入にできるマニピュレータの制御方法を提供することである。
【解決手段】本発明は、上記目的を達成するために、少なくとも一つの駆動部と、前記駆動部に接続する少なくとも一つのリンクとを備えるマニピュレータの前記駆動部の姿勢角を検出し、前記姿勢角から前記マニピュレータの手先の位置および姿勢を算出するマニピュレータまたはマニピュレータの制御方法において、前記姿勢角の検出は前記リンクの駆動軸またはその延長線が前記姿勢検出器の検出軸とが一致するように設けられた前記姿勢検出器によって行なうことを第1の特徴とする。
(もっと読む)
力検出機能をもった駆動装置
【課題】駆動機能と力検出機能を備えた装置の構造単純化/薄型化を図る。
【解決手段】上方基板15と下方基板25との間に、2本のリニアアクチュエータU1,U2を、互いに逆方向に傾斜するように配置する。アクチュエータU1,U2の上端は、上方膜部11,12を介して上方基板15に接続され、下端は、導電性の下方膜部21,22を介して下方基板25に接続される。上方基板15に右方向の力が作用して右方へスライドすると、U1は寝る方向へ傾いて下方膜部21は上方へ変形し、U2は立つ方向へ傾いて下方膜部22は下方へ変形する。下方膜部21と電極E5による容量素子と、下方膜部22と電極E6による容量素子との容量値の差により、X軸方向の力検出を行う。両容量値の和により、Z軸方向の力検出もできる。アクチュエータU1,U2を伸縮駆動すれば、上方基板15を移動させたり回転させたりできる。
(もっと読む)
力制御ロボット
【課題】力制御ロボットのエンドエフェクタの振動を抑制し、エンドエフェクタに作用する力の検出精度を向上させる。
【解決手段】一方が固定端、他方が可動端となるロボットアーム1の可動端に弾性部材3aを介して接続されたエンドエフェクタ2は、エンドエフェクタコントローラ6によって開閉動作等を制御される。力覚センサ3は、エンドエフェクタ2に作用する外力を、弾性部材3aの変形量より検出する。エンドエフェクタコントローラ6は、弾性部材3aよりロボットアーム1の固定端側に支持され、ロボットコントローラ5は、力覚センサ3の検出値に基づいてロボットアーム1の動作を修正する。
(もっと読む)
ロボット
【課題】複数のモータに対して複数のドライバモジュールを用意する場合、誤配線を防止すると共に冷却対策が容易となり、生産効率を向上できるロボットを提供する。
【解決手段】コントローラ3に第1〜第3ドライバモジュール8〜10を備え、ドライバモジュール8〜10には夫々、第1軸及び第4軸,第2軸及び第3軸,第5軸及び第6軸のモータを駆動するドライバICを搭載する。また、ケーブル4がコントローラ3に接続される側は、ドライバモジュール8〜10に応じた分岐部4B(1)〜4B(3)の先にそれぞれコネクタ20〜22を備え、夫々異なる2端子が短絡された識別用端子として定められ、コントローラ3側のコネクタ23〜25はコネクタ20〜22の何れもが接続可能な共通の形状である。
(もっと読む)
ロボット手術用のツールメモリベースのソフトウェアの更新
【課題】好適なロボット装置等を提供すること。
【解決手段】ロボット手術および他のロボットアプリケーションで使用するためのロボット装置、システム、および方法、および/または医療機器、システム、および方法は、再利用可能なプロセッサおよび限定使用のロボットツールの両方、または医療用プローブを含む。限定使用の構成要素であるメモリは、プロセッサによってインプリメントされるデータを有する機械可読コードおよび/またはプログラミング命令を含む。プロセッサのプログラミングは、プロセッサによって構成要素からダウンロードした新しいデータを一度送ることによって更新することができる。以降の構成要素は、ダウンロードを繰り返さずに更新されたプロセッサを活用することができる。
(もっと読む)
多関節構造体、それを用いた装着具、システムおよびヒューマンマシンインターフェース
【課題】多関節構造体の長さを手動で任意に変更可能とする。
【解決手段】本発明の多関節構造体は、各関節間の連結部にポテンショメータ等の変化量検出センサが設けられ、複数のセンサをグループ単位とし、前記グループ単位に前記センサの信号が信号処理部に取り込まれ、前記信号処理部間は通信ネットワークに接続され、前記通信ネットワークに接続された処理演算部が、前記センサの信号データに基づいて演算処理する多関節構造体において、前記多関節構造体における外形形状は管状若しくは筒状に構成され、内部に動力線が配設され、前記多関節構造体の形状が変形した際に、前記関節間の連結部の変化量をリアルタイムに検出し、前記関節の並進、回転移動した際の移動量及びベクトルを出力でき、前記多関節構造体が人体又は移動体に組み込まれた構成とされる。
(もっと読む)
ロボット関節のための統合高速トルク制御システム
【課題】ロボットの関節の制御システムであって、高速トルクを達成し、かつノイズに強い制御システムを提供する。
【解決手段】並置関節プロセッサ及び高速通信バスを有する印刷回路基板アセンブリ(PCBA)30を含んでいる。PCBAは、また、パワーインバータモジュール(PIM)34と、1つ以上のモータ位置センサからのセンサデータを処理するためのセンサ調整電子素子(SCE)36とを含んでいる。関節のモータのトルク制御は、高速トルクループとしてPCBAにより提供される。各関節プロセッサは、制御されるべきロボット関節内に組み込まれるか、又はそれに並置されている。関節プロセッサ、PIM、及び高速バスの並置により、制御システムの雑音イミュニティが増し、関節モータ40からのセンサデータの関節レベルの局所的処理により、各制御ノードに対する往復のバスケーブルを最短にすることができる。
(もっと読む)
フレキシブルセンサチューブ
【課題】瓦礫内探索ロボットが瓦礫に埋もれた人を発見した場合に、その位置を正確に把握することを目的とする。
【解決手段】瓦礫内探索ロボットが外部の空気コンプレッサーから空気圧チューブやCCDカメラ等の信号情報ケーブルで結ばれる必要性があることに鑑み、瓦礫内探索ロボットと外部の空気コンプレッサーとを結ぶ空気圧チューブやロボットに取り付けられたCCDカメラ等の信号情報ケーブルを多関節構造のチューブで覆い、各関節角をポテンショメータ等のセンサにより検出し、そのセンサの出力信号から多関節構造のチューブの全体形状を算出することにより、多関節構造のチューブの先端部に位置する瓦礫内探索ロボットの位置を同定する。
(もっと読む)
インターアクティブロボット制御システム及び使用方法
【課題】多自由度なヒューマノイドロボットに対する柔軟で拡縮可能な統合的制御アーキテクチャを提供する。
【解決手段】ロボットシステムは、関節、アクチュエータ、及びセンサを有するロボットと、分散コントローラとを備えている。コントローラは、コマンドレベルのコントローラと、それぞれが各関節を制御する組込み関節レベルのコントローラと、関節の動きを協働させる関節協働レベルのコントローラとを有している。中央データライブラリ(CDL)は、全ての制御及びフィードバックデータを集め、ユーザーインターフェースは、そのCDLを使用して、各関節、アクチュエータ、及びセンサの状態を表示する。パラメータ化された動作シーケンスは、リンクした各イベントの階層を有し、それにより、コマンドデータがリアルタイムで修正できる。
(もっと読む)
外付け式人間型手のためのアクチュエータおよび電子機器のパッケージング
【課題】外付け式人間型手のためのアクチュエータおよび電子機器のパッケージングを提供すること。
【解決手段】人間型ロボット用の下腕アセンブリは、第1の側および第2の側を有する腕サポートと、腕サポートの第1の側に取り付けられる複数の手首アクチュエータと、腕サポートの第2の側に取り付けられる複数の指アクチュエータと、腕サポートの第1の側にやはり配置される複数の電子機器とを備える。
(もっと読む)
1 - 20 / 76
[ Back to top ]