
Fターム[3C007KV01]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946) | パルスエンコーダ(例;回転式、直線式) (130)
Fターム[3C007KV01]に分類される特許
1 - 20 / 130
ロボット制御装置およびキャリブレーション方法
【課題】ロボットの関節軸を動作限界位置でキャリブレーションできない場合においても、限られた空間の中で精度良くキャリブレーションすることが可能な技術を提供する。
【解決手段】ロボット制御装置200は、ロボット本体の関節軸上の任意のキャリブレーション位置に関節軸が移動された場合において、アブソリュートエンコーダから位置情報を取得し、取得した位置情報に含まれる一回転内位置が、多回転位置をカウントする基準となる原点を含まない所定の許容範囲に含まれるか否かを判定する。そして、一回転内位置が、許容範囲に含まれない場合には、一回転内位置が許容範囲に含まれるまで、キャリブレーション位置の移動を要求し、一回転内位置が許容範囲に含まれる場合には、取得した位置情報と関節軸の制御位置とに基づいて、関節軸の位置を補正するための補正値を決定する。
(もっと読む)
ロボットのコントローラ

【課題】ロボットのコントローラにおいて、特別なハードウェアを追加することを抑制しつつ、被検出対象が異常であることをより確実に検出する。
【解決手段】ロボットのコントローラ20は、メイン制御基板21及び第1サブ制御基板22を備える。制御基板21,22の各FPGA31は、所定速度でカウントを行うタイムカウンタTCを有し、タイムカウンタTCの値に基づいて所定規則で1ビットの参照値及び信号値POUTをそれぞれ算出し、タイムカウンタTCの値が所定値になった時に、1ビットの信号値POUTの入力及び1ビットの信号値POUTの出力をそれぞれ行う。制御基板21のFPGA31は、信号値POUTが参照値と一致しないことを条件として異常であることを検出する。第1CPU34は、上記2つのタイムカウンタTCの値を一致させた後に、制御基板21のFPGA31に異常の検出を開始させる。
(もっと読む)
ロボット制御装置、ロボットシステム、及びロボット制御方法
【課題】ロボットに取り付けられたエンドエフェクターとコンベヤー上のワークとの衝突を抑制することのできるロボット制御装置、該装置を備えるロボットシステム、及びロボット制御方法を提供する。
【解決手段】ロボットコントローラー10は、エンドエフェクターがワークの上方に移動する際に、該ワークの位置の上方にエンドエフェクターが到達するために必要な水平動作時間を算出する水平動作時間算出部15aと、エンドエフェクターの速度とワークの速度とが同調するために必要な追従動作時間とを算出する追従動作時間算出部14と、エンドエフェクターがワークの上方に到達する前に、水平動作時間と追従動作時間とを比較してエンドエフェクターの下降の終了時を設定する下降設定部16とを有する。下降設定部16は、水平動作時間が追従動作時間よりも短い場合、エンドエフェクターの移動の開始時から追従動作時間の経過時以降を下降の終了時とする。
(もっと読む)
ロボットシステム、ロボット制御装置およびロボット制御方法
【課題】高精度の位置決めを容易に行うこと。
【解決手段】隣接するリンクが関節を介して連結され、関節にモータ11とモータ11の駆動力をリンクに伝達する減速機12とが設けられたロボット2において、モータ11の回転角度を検出する第1の検出部と、減速機12の出力軸の回転角度を検出する第2の検出部とを備える。ロボット制御装置3は、第1の検出部による検出結果および第2の検出部による検出結果に基づいて、モータ11の位置指令を補正し、補正した位置指令Prefを出力する。
(もっと読む)
ロボット、ロボットシステムおよび回転電機
【課題】モータの駆動力をリンクに伝達する減速機の出力軸の回転角度をより精度よく検出すること。
【解決手段】モータ11と、モータ11の駆動力をリンクである下部アーム26bに伝達する減速機12と、減速機12の出力軸125の回転角度を検出するエンコーダ14bとを備える。そして、第2のエンコーダ14bは、減速機12の出力軸125に軸継手140を介して連結される。かかる第2のエンコーダ14bの検出結果に基づいてモータ11の位置指令が補正される。
(もっと読む)
ロボット及びロボットのノイズ除去方法
【課題】慣性センサーを用いたフィードバック系において、発振してしないロボットを提供する。
【解決手段】アーム101と、アームを回動させるモーター103とトルク伝達機構102とを含むアーム連結部104と、アーム101の端部のアーム連結部104に連結された基体105と、モーター103の回動角度を検出しモーター103の回動角度情報を出力する角度センサー106と、アーム101に作用する慣性力の情報を出力する慣性センサー107と、アーム101の回動動作を制御する制御部108と、角度センサー106の出力と慣性センサー107の出力とから慣性センサー107のノイズ周波数を検出するノイズ検出部109と、ノイズ検出部109の情報からフィルター111の特性を決めるフィルター定数決定部110と、フィルター定数決定部110に基づき慣性センサー107のノイズを除去するフィルター111とを備える。
(もっと読む)
関節駆動装置
【課題】人工筋肉アクチュエータを動力源とする筋骨格型ロボット等の関節駆動装置において、装置全体を大型化することなく、可動範囲の広範化及び所定の可動範囲での高出力化が可能な関節駆動装置を提供すること。
【解決手段】支持軸32に回転自在に支持されるプーリ4と、支持軸32に回動自在に支持されるリンク部6と、第1人工筋肉2a及び第2人工筋肉2bを有し、第1人工筋肉2a及び第2人工筋肉2bの拮抗筋運動による収縮量の差により、プーリ4を回転させる人工筋肉アクチュエータ2と、を備えた関節駆動装置1において、リンク部6の回転角度を検出する原点センサと、リンク部6をプーリ4に接続させて、回転駆動力を伝達する接続クラッチ7と、を備え、人工筋肉アクチュエータ2により所定の回転角度に回転されたプーリ4と所定の回動位置に位置するリンク部6とを接続して、リンク部6のプーリに対する相対的な回動範囲を切り替える。
(もっと読む)
ロボット制御装置、ロボット制御方法およびロボットシステム
【課題】ロボットにおける所定の部位があらかじめ定められた位置へ移動したことを示す通知信号の出力を適切に行うこと。
【解決手段】ベクトル算出部が、基準部位置における基準部の移動方向を示す第1のベクトルと、信号出力位置および基準部位置間の相対位置を示す第2のベクトルとを算出するようにロボット制御装置を構成する。また、信号出力判定部が、ベクトル算出部によって算出された第1のベクトルおよび第2のベクトルに基づいて通知信号を出力するか否かを判定するようにロボット制御装置を構成する。
(もっと読む)
医療用マニピュレータ
【課題】駆動源から先端動作部に駆動力を伝達する動力伝達経路上に設けられた可撓性を有する動力伝達部材の異常の有無を判断できる医療用マニピュレータを提供する。
【解決手段】医療用マニピュレータ10において、モータ50a、50bの駆動力はワイヤ80a、80bを介して先端動作部12に伝達される。モータ50a、50bは、コントローラにより駆動制御される。コントローラ29は、始業前点検として、規定信号に従ってモータ50a、50bを動作させ、エンコーダ51a、51bからの信号に基づいてモータ50a、50bの動作角度を監視し、モータ50a、50bが目標角度に達するのに要する動作時間に基づいて、ワイヤ80a、80bの異常の有無を判断する。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
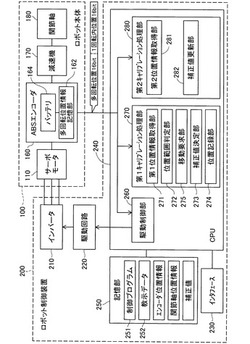
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
ロボットシステム
【課題】ロボットの運転に際し、制御ユニット側からロボット側のエンコーダに対して適正な駆動電源を供給し、ひいてはエンコーダの検出性能を確保する。
【解決手段】ロボット10は、複数のモータ21〜26と複数のエンコーダ21a〜26aとを備えている。ロボット10と制御ユニット30とは電気ケーブル40を介して接続されており、それにはエンコーダ駆動電源を供給する電源ケーブル42が含まれている。制御ユニット30は、コントローラ31と電源回路32とを備えており、コントローラ31は、電源回路32で生成される電源電圧を、エンコーダ駆動に適した適合電源電圧に調整する。このとき、コントローラ31は、電源電圧を複数の段階で変更しながら設定し、電源電圧が設定された状態で、各エンコーダ21a〜26aの通信状況の良否を判定する。そして、通信状況が良好であると判定された時の電源電圧に基づいて、適合電源電圧を算出する。
(もっと読む)
制御装置、産業用ロボット、座標系の再現方法、及びプログラム
【課題】座標系を設定した後にその座標系の設定に用いた基準位置データが消失した場合にも、容易にその座標系を再現することを可能にする。
【解決手段】制御装置10が、基準位置データを記憶するための基準値記憶部10aと、制御対象の所定の運動軸を所定の位置に変位させた状態で位置の検出を行うことにより位置データを取得しそれを保存する基準取得部(第1基準取得部12a、第2基準取得部13a)と、上記位置データと基準位置データとに基づいて座標系を設定する第1座標系設定部12と、基準位置データに対する位置データの相対データを取得しそれを保存する相対値取得部(第1座標系設定部12)と、基準位置データが消失したか否かを判断する判断部13cと、基準位置データが消失したと判断された場合に、上記検出により位置データを取得し、その位置データと上記相対データとに基づいて、座標系を再現する第2座標系設定部13と、を備える。
(もっと読む)
ロボット装置およびロボット装置の制御方法
【課題】実作動時において基準となるセンサー検出データと比較し、その検出データの差分から確実な故障判断を行うロボット装置および制御方法を提供する。
【解決手段】アクチュエーターを含む連結装置によりアームが回転もしくは直線移動可能に連結されたロボット装置であって、アームに取り付けられた慣性センサーと、アクチュエーターに備える角度センサーからの回転角度データから、アクチュエーターの角速度および角加速度を演算する第1演算部と、慣性センサーにより検出された出力より、アームの角速度または角加速度を演算する第2演算部と、第1演算部により演算された角速度または角加速度と、第2演算部により演算された角速度または角加速度とを比較する比較部と、比較部においてアクチュエーターとアームの角速度または角加速度との差の絶対値が、閾値より大きい場合に慣性センサーが故障と判定する。
(もっと読む)
駆動装置
【課題】変形可能な変形機械要素を介して動力が伝達される装置における、変形機械要素の変形量を高精度に取得する。
【解決手段】回転子20と結合された第1アーム1と、固定子10と結合された第2アーム2と、固定子10と第2アーム2の間に設けられた弾性部材30と、回転子20に設けられたエンコーダ板Eと、固定子10に設けられ、エンコーダ板Eの符号を検出する第1フォトセンサS1と、第2アーム2に設けられたエンコーダ板Eの符号を検出する第2フォトセンサS2とを備えて、駆動装置を構成する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
ロボットの制御装置
【課題】鉛直方向を検出することのできるロボットの制御装置を提供する。
【解決手段】ロボット10は、第4軸線J4の方向に延びるとともに、第4軸線J4を中心として回転可能に支持された第2上アーム16Bと、第4軸線J4に直交する第5軸線J5から離れる方向へ延びるとともに、第2上アーム16Bにより第5軸線J5を中心として回転可能に支持された手首部17とを備える。第4軸線J4を中心として第2上アーム16Bを重力により自由回転させ、且つ第5軸線J5を中心として手首部17を重力により自由回転させた場合に、手首部17の先端が指す方向を鉛直方向として検出する。
(もっと読む)
ロボット
【課題】 ケース部材の開口縁部とシャッタとの隙間からケース部材の内部に塵埃や異物が浸入することを防止できるロボットを提供すること。
【解決手段】 軸方向に沿う一面が開口したケース部材10と、ケース部材10の軸方向に移動可能な状態でケース部材10に取り付けられた可動部材20と、可動部材20を移動させる駆動装置40と、ケース部材10の開口15を塞ぎ可動部材20に位置する部分が開口15の縁部から離間されるシャッタ50とを備えたロボットAを構成した。そして、可動部材20の移動方向の両端に、シャッタ50の外面と開口15の縁部とに接触するワイパ34を着脱可能に設けた。ワイパ34の可動部材20への取り付けを、可動部材20に係合部36を設けるとともに、ワイパ34に被係合部37を設けて、ワイパ34を係合部36に対してスライドさせることにより行った。
(もっと読む)
自己位置推定装置および自己位置推定方法
【課題】高サンプリング周期で、高精度に自己位置を推定することが可能な自己位置推定装置を提供する。
【解決手段】本発明の自己位置推定装置は、移動機構を備え、所定の空間を移動可能な自律移動装置の移動機構による動作情報を検出する内界センサ、および所定の空間内に関する空間情報を検出する外界センサによる検出結果に基づいて、第1のサンプリング周期で自己位置を推定する第1の自己位置推定部と、第1の自己位置推定部による自己位置推定結果と、内界センサにより検出された自律移動装置の動作情報とに基づいて、第1のサンプリング周期よりも高いサンプリング周期で自己位置を推定する第2の自己位置推定部と、を備える。
(もっと読む)
ロボットの制御装置及び方法
【課題】ロボットの柔軟制御中にロボットに対して急激に大きな外力が働いた場合に、ロボット各軸の位置の急激な変化に適切に対応し得る可動域制限を行うことができる制御装置及び制御方法を提供する。
【解決手段】本制御装置及び制御方法は、少なくとも1つの関節を有するロボットにおいて、各関節につき、関節位置指令に対して、位置フィードバック制御及び速度フィードバック制御を行い、該関節に設定された関節座標系において、所定の制限開始位置と該関節の現在位置との関係及び所定の制限開始速度と該関節の現在速度との関係に基づいて制限トルクを計算し、計算された制限トルクを速度フィードバック制御の出力に加算して得られるトルクにより該関節の動作を制御する。
(もっと読む)
脚式移動ロボットの歩容生成装置
【課題】複数の接触対象面からロボットに外力が作用する状況でのロボットの目標歩容を生成する場合に、ロボットに作用させるべき外力に関する目標を効率よく適切に決定する。
【解決手段】ロボット1の動作環境の複数の接触対象面FL,WL1,WL2を仮想面S3a,S2a,S2bで近似し、ロボット1全体の目標運動のうちの並進運動を実現するために、仮想面S3a,S2a,S2bからロボット1に作用させるべき並進力(仮想面必要並進力)の暫定値を決定する。さらに、ロボット1全体の目標運動のうちの回転運動を実現するために、仮想面必要並進力の暫定値と組み合わせるモーメント補償量を決定し、この仮想面必要並進力の暫定値とモーメント補償量との組に基づいて各接触対象面からロボット1に作用させるべき目標外力及び目標外力作用点を決定する。
(もっと読む)
1 - 20 / 130
[ Back to top ]