
Fターム[3C007KV12]の内容
マニピュレータ、ロボット (46,145) | センサの方式 (946) | 光電式 (348) | 投受光器間の光線遮断によるもの (51)
Fターム[3C007KV12]に分類される特許
1 - 20 / 51
把持装置及びその制御方法
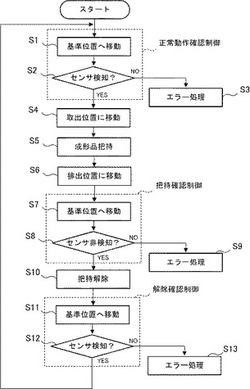
【課題】より簡素な構成で把持対象物の把持確認及び把持解除確認を行うこと。
【解決手段】第1及び第2の把持部材が把持対象物を把持する把持位置よりも閉側の位置である基準位置に位置しているか否かを検出する検出手段を設け、把持対象物の把持後に前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出されなかった場合に、把持対象物の把持が正常であると判定し、把持対象物の把持の解除後、前記第1及び第2の把持部材を前記基準位置に移動するように制御し、前記第1及び第2の把持部材が前記基準位置に位置していることが検出された場合に、把持の解除が正常であると判定する。
(もっと読む)
把持装置

【課題】従来に比して、より小型・軽量であって、ワークの把持動作に要する時間の短縮を図った把持装置を提供する。
【解決手段】把持される対象たるコネクティングロッド2を挟圧するための一対の挟圧部5・6を1組以上(本実施形態では4組)備えるとともに、1組以上の一対の挟圧部5・6を挟圧方向に向けて相対変位させるためのアクチュエータ7を備え、各挟圧部5・6の一対の挟圧部によりコネクティングロッド2を挟圧するときにコネクティングロッド2と当接する部位において、コネクティングロッド2の外形形状に倣った凹凸部が形成される一対の把持部8・9を備える、コネクティングロッド2を把持するための把持装置3であって、一対の把持部8・9のうち、一方の把持部9は、挟圧方向に向けて弾性変形する弾性部材10を介して、挟圧部6に支持される。
(もっと読む)
基板位置検出方法
【課題】搬送ロボットにより基板を搬送する際に、ハンド上の基板の中心位置の検出精度を向上できるようにした基板位置検出方法を提供する。
【解決手段】ハンド7に、搬送経路上の所定位置に設定した検出点PSに基板の周縁があるか否かを検出するセンサで検出可能な指標として、R方向に所定距離LR0離れた第1指標73と第2指標74とを設ける。第1指標73が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を基準位置として、基準位置から、第2指標74が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置までの変位量LRを算出し、この変位量LRと指標73,74間の距離LR0との比を補正係数として算出する。そして、基板の周縁の各箇所が検出点にあると検出されたときのロボット動作量から求めたハンドのR方向位置を、当該R方向位置と基準位置との偏差に補正係数を乗算して補正する。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制する。
【解決手段】組立ロボットは、ロボットアーム、ロボットハンド2および制御部を備え、ロボットハンド2は、ワークを把持する把持部、および、把持部に駆動用の圧縮エアを供給する電磁弁33を備える。組立ロボットでは、把持部制御信号が制御部からロボットハンド2の無線通信部35へと無線にて送信され、把持部によるワークの把持状態を示す把持状態信号が、無線通信部35から制御部へと無線にて送信される。このため、制御部とロボットハンド2との間において、把持部制御信号および把持状態信号の送受信用の配線が不要となる。このように、ロボットハンド2に接続される配線を削減することにより、配線によりロボットハンド2やロボットアームの可動範囲が制限されてしまうことを抑制(または防止)することができる。
(もっと読む)
ロボットハンド
【課題】配線によりロボットハンドやロボットアームの可動範囲が制限されることを抑制するとともに把持部の種類を容易に変更する。
【解決手段】組立ロボットでは、制御部から固定部31へと出力された把持部制御信号および結合部制御信号が、スリップリング35を介して回転部32へと伝達され、また、把持状態取得部から出力された把持状態信号が、回転部32からスリップリング35を介して固定部31へと伝達されて制御部へと送られる。このため、固定部31と回転部32との間における信号伝達用の配線が外部に露出することを抑制することができ、配線によりロボットハンドやロボットアームの可動範囲が制限されてしまうことを抑制することができる。また、ロボットハンドでは、把持部および把持状態取得部を備えるハンド先端部が、結合部323により回転部32に対して着脱自在に固定されるため、把持部の種類を容易に変更することができる。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
電動チャック
【課題】電動アクチュエーター或いはメカニカルチャックが故障した場合に部品交換が容易であり、汎用性が高く、メカニカルチャックにおけるフィンガーのワークに対する芯出し作業を手動で簡単に行える電動チャックの提供。
【解決手段】モータ9と、その回転出力軸に回転が止められて螺合した直動出力軸11とを備えた電動アクチュエーター3に、プッシャー22が押圧されることによりワーク把持用のフィンガー35が開かれ、プッシャー22が押圧されていない時はバネの力でフィンガー35が閉じるメカニカルチャック4を着脱可能に取り付けてある。回転出力軸に直動出力軸11を軸方向に調整できるハンドル19を固定する。ハンドル19は放熱部材を兼ねたアルミ合金製とすることがある。
(もっと読む)
搬送ロボット及び自動教示方法
【課題】 予め定められた一方向にエンドエフェクタを移動させることで教示位置を教示可能な自動教示装置を提供する。
【解決手段】 半導体搬送ロボット1は、ハンド2と、第1及び第2光電センサ14,15と、制御部28とを有する。第1及び第2光電センサ14,15は、ハンド2に設けられ、互いに異なる方向に延びる光軸L4,L5を有する。制御部28は、予め定められた仮教示位置pcに向かってハンド2を移動させて第1及び第2光電センサ14,15により正教示位置prに配置される冶具31に立設されるピン32を夫々検出させ、検出したときのハンド2の位置である第1及び第2検出位置p1,p2に基づいて正教示位置prと仮教示位置pcとのズレ量Δr、Δθを演算して正教示位置prを求める。制御部28は、ピン32を検出させる際、光軸L4.L5が延びる方向と異なる方向にハンド2を移動させる。
(もっと読む)
安全制御装置、ロボット、システム、プログラム、及び、記録媒体
【課題】安全制御手段を内蔵したロボットと併用することによって、該安全制御手段を2重化することができ、また、該ロボットと別個に使用することができる安全制御装置を実現する。
【解決手段】安全制御装置2は、センサにより検出された外界の状態に応じて内部状態を遷移させるか、または、安全制御手段11bにより発行されたコマンドに応じて内部状態を安全制御手段11bと同期させるFPGA基板21であって、内部状態を安全制御手段11bと同期させるときに、センサにより検出された外界の状態が予め設定された特定の条件を満たしているか否かを判定し、満たしていないと判定した場合にはサーボ機構12への電力供給を断つFPGA基板21を備えている。
(もっと読む)
侵入検知機能付き安全位置検出装置
【課題】作業員の侵入を検知するとともに、作業員の位置の検出することができる、きわめて構成が簡単な侵入検知機能付き安全位置検出装置を実現することを課題とする。
【解決手段】ロボットから所定距離離れた境界線に沿って配設されライトカーテンを構成する複数の侵入検知センサ用のマーカと、人に取り付けた人位置検出用センサ用のマーカと、前記侵入検知センサ用のマーカ及び人位置検出用センサ用のマーカからの光を受光する受光器とを備え、マーカからの光は、符号化された所定の符号パターンとなるように能動的にデジタル符号化し、送信信号として機能する光として投光される。
(もっと読む)
移載機
【課題】フォークに光センサの配線をすることなくワークの有無を検知することができる移載機を提供すること。
【解決手段】屈伸可能に連結された第1アーム1及び第2アーム2を左右に1対配設し、第1アーム1の基部をそれぞれ駆動軸3に接続するとともに、第2アーム2の先端部でフォーク4を支持し、各アーム1、2の屈伸によりフォーク4を進退するようにした移載機において、フォーク4上のワークWの有無を検知する光センサ10を移載機本体7に設けるとともに、フォーク4上のワークWの有無によって開閉する遮光板12と、その作動機構13からなるシャッタ機構を有するミラー11を配設し、光センサ10の光をミラー11に反射させることによりワークWの有無を検知できるようにし、かつ、光センサ10をミラー11が通過する経路から外れた位置に取り付ける。
(もっと読む)
相対ティーチング方法
【課題】 高い信頼性を持って迅速に相対ティーチングができるようにした搬送ロボットの相対ティーチング方法を提供する。
【解決手段】 基板Sをロボットハンド13にて支持した状態で同一平面内を旋回及び伸縮動作させ、前記旋回方向に沿って配置された複数の処理室L、P1乃至P3間で基板を搬送する搬送ロボット1に対し、その搬送動作を教示するとき、いずれか一の処理室に対して伸縮動作する際に基準となる座標データを教示し、この座標データに基づいて他の処理室に対して伸縮動作する際に基準となる座標データを教示する。一の処理室における座標データを教示する際にその伸縮軌道データを取得し、他の処理室における座標データを教示する際に、前記一の処理室及び他の処理室への搬送ロボットの伸縮ストロークが相互に異なると、前記伸縮軌道データから前記ロボットハンドの位置を補正する。
(もっと読む)
ロボット、及びロボットの教示位置の直進開始位置の較正方法
【課題】 教示位置検出手段により教示位置を検索する際に、教示位置検出手段の周辺のスペースが狭くとも教示位置が精度良く検出できるロボットを提供する。
【解決手段】 ロボット1は、レーザセンサ10を備えるロボットハンド2を3つの連結部5,6,7が街道可能に連結されたアーム3によって移動させてターゲット冶具18を検索し、ターゲット冶具18が検出された検出位置である直進開始位置からターゲット冶具18に向かってロボットハンド2を直進させる多関節ロボットである。更にロボット1は、制御装置33を備える。制御装置33によりロボットハンド2を移動させて第1及び第2検出位置でターゲット冶具18を検出させ、これら2つの検出位置の位置情報を取得し、これら2つの位置情報に基づいて、前記ロボットハンド2が予め定められた経路Cを直進するように前記直進開始位置を較正する。
(もっと読む)
試料位置検知端部エフェクタおよびその使用方法
【課題】ウエハの引っ掻き傷や粒子による汚損を最少にして半導体ウエハを確実に移送し得る試料把持用端部エフェクタを提供すること。
【解決手段】光源、及び受光部に作動するように連結された本体を有する端部エフェクタを設け、前記光源、及び受光部は離間するそれぞれの光源光路開口、及び受光路開口を有し、これ等開口の間に光透過路に沿って光ビームが伝搬し、これ等光ビームが既知のビーム形状であるように前記光源光路開口、及び受光路開口の寸法を定め、前記試料と本体との空間を狭くするため、これ等試料と本体との間の相対運動を与え、前記相対運動を与えることに組み合わせて、前記光透過路に交差するように前記試料を位置決めする。
(もっと読む)
物品保持装置
【課題】物品に位置ズレが生じていても、物品を適切に保持できる物品保持装置を提供する。
【解決手段】物品保持装置13は、物品2の側面部3,4,5に対して進退可能でそれぞれが異なる側面部3,4,5に引っ掛かるフック体21,41,51を備える。各フック体21,41,51には、対応する側面部3,4,5を検知する検知手段42,52を取り付ける。対応するフック体21,41,51を進退させる駆動手段23を各フック体21,41,51に対応して設ける。物品保持装置13は、検知手段42,52の検知に基づいて駆動手段23を制御して各フック体21,41,51の進出動作を個別に停止させる制御手段61を備える。
(もっと読む)
基板搬送システム
【課題】基板検出センサのセンサ信号を取りこぼさないようにすることで、基板搬送システムの基板搬送精度を向上させる。
【解決手段】フォーク34を動作させる搬送アーム31と、搬送アーム31を駆動するアーム駆動モータ32と、アーム駆動モータ32の回転角度を検出するモータエンコーダ33と、基板を検出可能な基板検出センサ4と、基板検出センサ4からのセンサ信号41を受信し、センサ信号41が変化すると同時にモータエンコーダ33からのエンコーダ値を保持するラッチ回路24と、センサ信号の変化の順番と、そのときのエンコーダ値とを各々セットにして順次記憶する記憶手段25と、記憶手段25に記憶されたデータをもとに基板5の位置を演算する演算部と、を備える基板搬送システム1とした。
(もっと読む)
移載機
【課題】アームやフォークを短くしても必要な移載ストロークを得ることができ、移載機を小型軽量で低価格にするとともに、さらに、旋回動作を必要とすることなく前後の棚にアクセスすることができ、動作時間を短縮化できる移載機を提供すること。
【解決手段】屈伸可能に連結された第1アーム1及び第2アーム2を左右に1対配設し、第1アーム1の基部をそれぞれ駆動軸3に接続するとともに、第2アーム2の先端部でフォーク4を支持し、各アーム1、2の屈伸によりフォーク4を進退するようにした移載機において、第2アーム2の先端部に第2アーム2の揺動に伴って一体に回転するギヤ5を固設するとともに、第2アーム2の内側で各ギヤ5に噛合する進退方向のラック6をフォーク4に設ける。
(もっと読む)
自動教示システム
【課題】簡易な構成により搬送ロボットに対して搬送対象ポイントまでのハンドの移動経路を自動的に教示することが可能な自動教示システムを提供する。
【解決手段】 自動教示システムは、第1の光学センサ72、第2の光学センサ74、記録手段および算出手段を実現するCPU50を備える。第1の光学センサ72および第2の光学センサ74は、搬送対象ポイントに対する相対位置が予め定められるように配置される。第1の光学センサ72は、ハンド20の水平方向の一端部を検出可能に構成される。第2の光学センサ74は、ハンド20の水平方向の他端部を検出可能に構成される。CPU50は、第1の光学センサ72および第2の光学センサ74によってハンド20の端部が検出された時におけるロボット座標系における座標値を記録するとともに、その座標値に基づいてロボット座標系における搬送対象ポイントの座標値を算出する。
(もっと読む)
円盤状物の位置決め方法並びに、その方法を使用する円盤状物の位置決め装置、搬送装置および半導体製造設備
【課題】位置決め装置と搬送ロボットとを具える半導体製造装置における設備立ち上げ時の各ポートでの基準位置教示の時間短縮を目的とする。
【解決手段】ウエハ等の円盤状物47の円周と検出手段の軌跡43とが交わる2点W1、W2を検出し、この2点とこれらを結ぶ線分の垂直二等分線42上の特定点Oと円盤状物の半径rとを用いて円盤状物の中心位置Aを算出する。これにより搬送ロボットに位置決め作業をさせ、その結果を用いて搬送経路の修正ばかりでなく設備立ち上げの際の基準位置教示も大部分自動化できた。ノッチがある場合は、円盤状物の円周を検出手段の2本の軌跡で検出し、正しい中心位置を見いだす。またノッチを有する半径未知の円盤状物では、その円周を検出手段の、共にノッチに掛からない距離だけ互いに離間した3本の軌跡で検出して半径を求めることで、直径の異なるウエハを用いる混合生産も可能となった。
(もっと読む)
吸着装置
【課題】吸着台上の被吸着物20を真空吸着して保持する吸着装置1において、凹凸がある被吸着物20でも確実に吸着するとともに、被吸着物20が置かれていない吸着孔19を確実に塞ぐようにする。
【解決手段】
前記吸着台は、複数の吸引孔19を配し、近傍に光源14を配し、前記吸着孔19は、それぞれ電磁石5により開閉するバルブ機構8と、近傍にフォトセンサ15を配し、前記被吸着物20による前記光源14からの光の遮断を前記フォトセンサ15により検知して被吸着物20の有無を判定し、被吸着物20が置かれていないと判定したときは、前記電磁石5を駆動してバルブ機構8を塞ぐようにした。
(もっと読む)
1 - 20 / 51
[ Back to top ]