
Fターム[3C007MS21]の内容
マニピュレータ、ロボット (46,145) | 安全 (1,176) | マニピュレータの異常に対するもの (142)
Fターム[3C007MS21]の下位に属するFターム
動作限界検出、動作範囲制限 (24)
指令値の急変や実際値との乖離の検出 (39)
作動源の異常 (22)
Fターム[3C007MS21]に分類される特許
1 - 20 / 57
溶接ロボットの一時停止解析装置および一時停止解析プログラム
【課題】様々な状況下におけるチョコ停の改善に寄与することができるとともに、経験と知識がない場合であってもチョコ停の対策を行う箇所を容易に特定することができる溶接ロボットの一時停止解析装置および一時停止解析プログラムを提供する。
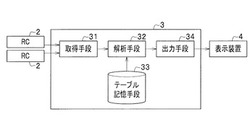
【解決手段】一時停止解析装置3は、ロボットコントローラ2から、ロボット位置情報と、ロボット動作情報と、溶接条件情報と、動作エラー情報と、を取得する取得手段31と、ロボット位置情報、ロボット動作情報、溶接条件情報および動作エラー情報と、これらに対応する一時停止の推定原因および一時停止の修正方法と、が予め記載されたテーブルを参照することで、溶接ロボット1の一時停止の原因とその修正方法を解析する解析手段32と、解析手段32が解析した解析結果を出力する出力手段33と、を備える。
(もっと読む)
ロボット

【課題】ロボットアームの機械部品の異常の有無を精度良く検出すること。
【解決手段】ロボット100は、アクチュエータAc2〜Ac15を有するアーム103L,103Rと、アーム103L,103Rの筐体の先端近傍に設けられ、アーム103L,103Rを構成する構造材料よりも固有振動数が大きい圧電体を有するセンサ130と、センサ130の近傍に設けられ、センサ130の出力信号をデジタル信号に変換するA/D変換器とを有している。
(もっと読む)
保持部材の姿勢判定装置、その方法、基板処理装置及び記憶媒体
【課題】 保持部材の姿勢に異常があるか否かを確実かつ容易に検出すること。
【解決手段】 保持部材であるフォーク3Aを前進させたときに、当該フォーク3Aがその前を通過するように、フォーク3Aの進行方向に対して側方にラインセンサ4を設ける。そして、フォーク3Aをラインセンサ4に対して進退させたときに、当該フォーク3Aの上下方向の位置と、フォーク3Aの進退方向の位置とを対応付けたデータを取得する。この取得されたデータに基づいて前記進退方向の位置に対して上下方向の位置を二次微分した値を演算し、この値に基づいて保持部材の姿勢の異常の有無を判定する。
(もっと読む)
ロボット及びロボットの異常判定方法
【課題】距離センサに異常があるか否かを判定することができるロボット及びロボットの異常判定方法を提供すること。
【解決手段】本発明にかかるロボットは、距離センサ15と、距離センサ15と離れて設けられた距離検出ユニット21とを備える。ロボットはさらに、距離検出ユニット21の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第1の距離検出手段と、距離センサ15の出力値に基づいて、距離センサ15と環境中にある物体50との距離を検出する第2の距離検出手段と、第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とを比較する比較手段と、前記比較手段の比較の結果、前記第1の距離検出手段の検出結果と前記第2の距離検出手段の検出結果とが異なる場合に、距離センサ15が異常であると判定する異常判定手段とを備える。
(もっと読む)
ロボット制御装置およびロボット制御方法
【課題】角度センサに異常が生じた場合において、サーボモータと減速機との接続部分への負担を抑制しつつ、ダイナミックブレーキと機械ブレーキとを用いて速やかにサーボモータを停止させる。
【解決手段】ロボット制御装置200は、角度センサ160の異常が検出された場合において、推定された回転速度においてダイナミックブレーキを作動させたと仮定した場合に該ダイナミックブレーキによって生じる制動トルクと、機械ブレーキ150を作動させたと仮定した場合に該機械ブレーキ150によって生じる制動トルクとのトルク合計値が、所定のトルク上限値を超える場合に、機械ブレーキを作動させずにダイナミックブレーキを作動させる第1の制動処理を実行し、トルク合計値が前記トルク上限値以下の場合には、ダイナミックブレーキおよび機械ブレーキを作動させる第2の制動処理を実行する。
(もっと読む)
移動体の充電装置及びその制御方法
【課題】一方の引張り出し検知センサが故障した場合であっても、配線部材が所定以上に引張り出されたとき、異常処理を行うことが可能な移動体の充電装置を提供する。
【解決手段】充電スタンド2は、ケーブル5aの第1の引張り出しを検知する第1の引張り出し検知センサ7と、ケーブル5aの第2の引張り出しを検知する第2の引張り出し検知センサ8を備える。制御装置4は、第1の引張り出し検知センサ7による検知に基づいて第1の制御指令を出力し、第2の引張り出し検知センサ8による検知に基づいて第2の制御指令を出力する。
(もっと読む)
ロボットシステム
【課題】センサ故障時のロボットの異常動作を防止する。
【解決手段】サーボモータ15の回転量を検出する第1の検出手段16と、ロボットアーム先端部に取り付けられ、ロボットアーム先端部の加速度aを検出する第2の検出手段17と、第1の検出手段16による検出値に基づきロボットアーム先端部の加速度a1を演算するとともに、この演算された加速度a1と、検出された加速度aとの偏差を演算する演算手段21と、演算手段21により演算された偏差の大きさが基準値αより大きいときに、サーボモータ15を非常停止する非常停止手段21〜23とを備える。
(もっと読む)
機械の操作装置
【課題】
ティーチペンダントの非常停止スイッチが有効に機能していない状態にも関わらず、有効に機能しているものとして報知することがある。
【解決手段】
TP(ティーチペンダント)100は非常停止SW110と、非常停止SW110の状態に応じて発光する発光体Lと、非常停止SW110の接点状態を監視し、接点状態に応じて光源制御信号を出力する第1CPU120,第2CPU130を備える。光源制御回路125は発光体Lを光源制御信号に基づいて制御する。ウオッチドッグ回路160は、第1CPU120,第2CPU130の作動状態を監視し、異常の場合に光源制御回路125に対し発光体Lの制御を禁止する。非常停止SW110が有効に機能していないにも関わらず機械を緊急停止させようとする行動を回避させることができる。
(もっと読む)
産業用ロボットの回転関節用配線装置
【課題】ロボットの高速動作に伴うフレキシブルプリント配線板の繰り返し曲げにより発生した導電線のマイクロクラックを適時のタイミングで把握する。
【解決手段】検査用FPC板14−2は、その板本体30−2及び検査用導電線27−2とも、主FPC板14−1の板本体30−1及び主導電線27−1と、同じ材質及び同じ形状をなす。検査用FPC板14−2は主FPC板14−1と厚み方向で並ぶように設けられ、動作条件も同じである。さらに検査用FPC板14−2の反転部Tでの位置が主FPC板14−1より内側としている。この結果、検査用FPC板14−2の疲労劣化速度が主FPC板14−1に対して僅かに早めとなる。
(もっと読む)
可動機械制御装置及び可動機械制御システム
【課題】
非常停止SWを備えた着脱可能な教示操作装置を有する可動機械制御システムにおいて、非常停止の原因が、非常停止SWの操作によるものか、回路の断線によるものかを容易に確認できない。
【解決手段】
並列回路部Kは、検出器32が教示操作装置50の接続を検出したときに閉成する半導体スイッチ41とコンデンサCの直列回路に対して並列に接続されたメーク接点RY1aを備える。パルス信号生成回路42は並列回路部Kに対して「H」信号、及びパルス信号を印加する。判定回路46は、「H」信号、及びパルス信号(論理信号)が印加された状態で並列回路部Kから出力される信号の論理状態に基づいて、ロボットRの非常停止が、並列回路部Kの断線によるものか、非常停止スイッチ52の操作によるものかを判定する。
(もっと読む)
ロボットのコントローラ
【課題】追加部品を搭載することなく、自身が正しい向きで設置されているか否かを自動的に判断することができるロボットのコントローラを提供する。
【解決手段】制御部47は、電圧検出部46を介して直流電源線L1、L2間のバス電圧の検出値を取得する。制御部47は、取得した検出値に基づいてバス電圧がゼロから変化したときに電圧変化フラグをオンする。制御部47は、電磁接触器43を閉路する指令が与えられた時点からカウントを開始し、電圧変化フラグがオンされた時点でそのカウントを停止する。制御部47は、そのカウント値を電磁接触器43の接点動作時間として取得し、この接点動作時間が所定範囲内の値であるか否かによって、コントローラ3が正しい向きで設置されているか否かを判断する。
(もっと読む)
ロボットの制御装置及びロボットの接続不良判定方法
【課題】誤配線が生じている状態でも、モータの誤動作量を極力少なくした状態で、誤配線を検出できるロボットの制御装置を提供する。
【解決手段】制御回路は、複数のサーボモータの何れか1つを検査対象モータとして(S4)、電源投入時に検査対象モータ)に配置されている位置検出器によって得られる位置θaから検査対象モータの初期位置を取得すると、検査対象モータの回転子が初期位置を維持するように、対応するインバータを介して検査対象モータの各相巻線に駆動電流を出力する(S11,S12)。その電流出力期間内にロボット本体の各軸に配置されるサーボモータの何れかが回転すると(S14:YES)、各インバータと夫々に対応するサーボモータとの接続状態を不良と判定する(S22)。
(もっと読む)
ロボットのコントローラ
【課題】制御命令を適切に受信できなかった場合に、どこに問題があるのかを特定することができるロボットのコントローラを提供する。
【解決手段】受信したパケットは、パケット格納用メモリに一時的に格納される。コントローラの制御部は、受信したパケット格納用メモリに格納された全てのパケットに対してパケット確認処理を実行する。このパケット確認処理では、各パケットのそれぞれについて、個別に正常または異常という判断がなされる。制御部は、正常であると判断したパケットのシリアル番号を正常に受信した旨を表すデータとともに外部に出力する。正常でないと判断したパケットについては、正常であると判断したパケットの1つ後に受信したパケットという形で特定し、その旨を表す異常データを外部に出力する。
(もっと読む)
ロボットの故障検出装置
【課題】撮影画像から簡易な画像解析によってアームの回転角を求め、これとモータの回転角から求められるアームの回転角を比較して回転位置検出が正常に行われているか否かを判断する。
【解決手段】所要のアーム4〜6に付されたマーカ19〜21をカメラにより撮影し、マーカ19〜21の撮影画像の形状、大きさ、または向きからアーム4〜6の回転角を演算し、アーム4〜6を駆動するモータの回転角から求めたアーム4〜6の回転角と比較し、その比較結果により回転位置検出が正常に行われているか否かを検出する。しかも、マーカ19〜21の撮影画像の形状、大きさ、または向きからアーム4〜6の回転角を演算するので、高度な演算をせずとも済む。
(もっと読む)
移動体
【課題】断線の発生に伴い移動体の状態の連続性が損なわれる事態を防止する
【解決手段】上位制御部200から配線500を介して中間制御部400に出力される指示信号を、中間制御部400の指示信号記憶部413に記憶させ、この指示信号記憶部413に記憶されている指示信号に応じた制御信号を、電動モータのドライブ回路ユニットなどを含む制御ユニット50に対して出力する。
(もっと読む)
ロボット制御システムにおける通信接続方法及びロボット制御システム
【課題】
コントローラによるロボットの運転状態が再生モードである場合、可搬式操作装置のコントローラに対する通信接続を、生産に影響することなく円滑に行うことができるロボット制御システムにおける通信接続方法を提供する。
【解決手段】
ロボット制御システム100における通信接続方法は、TP10から、ネットワークを介してコントローラ30に通信のログイン要求(接続要求)があった場合、TP10に設けられたログイン処理部18が、非常停止スイッチ12の操作状態、及び、コントローラ30のモード状態を取得して、非常停止スイッチ12の操作状態が非常停止状態で、かつ、モード状態が再生モードのときは、通信の接続要求後のコントローラ30に対する通信接続を認めず、そうでない場合には、通信接続を認可する。
(もっと読む)
ロボットシステム
【課題】異物に衝突したか否かにかかわらず、振動的な動作を伴うことなく且つ機構部品に損傷を与えることなくロボットを緊急停止させることができるロボットシステムを提供する。
【解決手段】緊急停止モードにおいて、位置制御部31は、上位制御部から与えられる位置指令pcにかかわらず出力する速度指令vcをゼロに固定し、通常の位置制御は行わない。速度制御部32は、モータMの回転速度v*をゼロに固定された速度指令vcに一致させるように電流指令演算値ic’を演算するとともに、その電流指令演算値ic’に対して所定のフィルタ制御を行って電流指令icの変化量を所定の制限値以下に制限する。
(もっと読む)
断線予測機能付ロボットケーブル
【課題】ロボットケーブルの断線時期を正確に予測し、交換時期を適切に決定できるようにする。
【解決手段】ロボットの可動部2、3との電気的接続に使用されるロボットケーブル10において、機械的寿命がそれぞれ異なる上に、いずれも主要芯線11、12の機械的寿命より短い複数の断線検知用芯線13〜15を、長さ方向に沿ったケーブル内に、主要芯線と一体的に配設すると共に、前記各断線検知用芯線13〜15は、一端が同側に配設され、他端が互いに電気的に接続された送信線13a〜15aと受信線13b〜15bとから、それぞれ対形成されている。
(もっと読む)
ロボットの異常監視機能を備えたロボットシステム
【課題】従来は検知できなかったエンコーダの異常を検知できる異常監視機能を備えたロボットシステムを提供する。
【解決手段】ロボット制御装置14は、第1〜第3サーボモータ22、24、26を制御するモータ制御部36と、視覚センサ34により得られた画像を処理する画像処理部38と、視覚センサを用いて得られた第1計測値とエンコーダを用いて得られた第2計測値との比較処理を行う比較部又は比較器40と、比較部40の処理結果に基づいてアラームを出力するアラーム出力部42とを有する。
(もっと読む)
波形パターン検出装置及びコンピュータプログラム及び波形パターン検出方法
【課題】少ない計算量で波形パターンの検出をできるようにして、実時間での検出を可能にする。
【解決手段】波形パターンを表わす一連の波形数値に基づいて、上昇回数算出部131、下降回数算出部133、変曲回数算出部141などの波形特徴量算出部が、上昇回数、下降回数、変曲回数など、対象波形パターンの特徴を表わす波形特徴量を算出する。算出した波形特徴量と、比較パターンの特徴を表わす比較特徴量とに基づいて、類似度算出部182が、類似度を算出する。算出した類似度に基づいて、類似判定部184が、対象波形パターンが比較パターンに近いか否かを判定する。
(もっと読む)
1 - 20 / 57
[ Back to top ]