
Fターム[3C033HH11]の内容
Fターム[3C033HH11]の下位に属するFターム
門型走行レールを持つもの (42)
直動する複数本のアームを持つもの (10)
一次元のみの運動を行うもの (2)
Fターム[3C033HH11]に分類される特許
1 - 20 / 27
ワーク搬出入装置及び乾燥処理装置
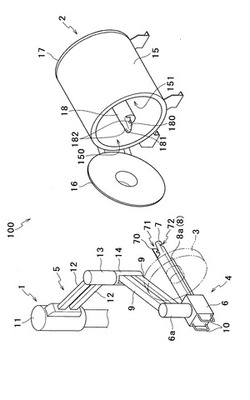
【課題】ワークの搬出入を容易に行うことのできるワーク搬出入装置及び乾燥処理装置を提供する。
【解決手段】操作部4と、荷重バランサー装置5と、を有し、操作部4は、エアレギュレータが搭載された箱体状の操作本体6と、操作本体6の前面側に設けられた長尺な棒状のアーム部材7と、固定機構8と、一対の把持部材10とを有している。アーム部材7は、ワーク3の内周面に挿入されることで、ワーク3を保持可能であって、その保持されたワーク3を軸方向に沿ってスライド可能に構成されている。
(もっと読む)
ローダ装置

【課題】 ローダ本体の下方移動に連動してチャック部材を把持状態にすることができるローダ装置を提供すること。
【解決手段】 上下方向に移動されるローダ本体24と、把持状態と解除状態との間を移動自在である一対のチャック部材48と、ローダ本体24に装着された第1シリンダ機構50と、工作機械本体側に装着される第2シリンダ機構52と、を備えたローダ装置。加工部材を把持するときには、第2シリンダ機構52が収縮状態に保持され、この収縮状態にてローダ本体24が下降位置の近傍まで移動すると、ロッド部材88の環状部材90が第2シリンダ機構52の環状リング86に当接し、ローダ本体24が更に下方に移動すると、ロッド部材88を介して第1シリンダ機構50の第1ピストン部が収縮位置に向けて移動し、これによって、一対のチャック部材48が把持状態に向けて移動される。
(もっと読む)
生産ラインおよび工作機械
【課題】スペース効率を良好にして一層の小型化を図ることが可能な工作機械および生産ラインを提供すること。
【解決手段】ワークWを加工する工具Tを取り付ける主軸台50と、主軸台50をXY方向に移動させるための移動手段32,42と、ワークWを保持することが可能なワーク保持部70と、XY平面に交差し、かつ主軸台50に接離するZ方向に沿ってワーク保持部70をワーク加工位置と退避位置との間で移動させるための接離駆動手段81と、主軸台50に対して上方側に位置すると共に複数または単数の工具Tを保持する工具ホルダ61と、退避位置に対してZ方向から離間する上方側であってZ方向に沿って工具ホルダ61から離間する部位に、ワーク保持部70にワークWを供給する、またはワーク保持部70からワークWを取り出す搬送手段100を位置させるためのローダ用通路91と、を具備している。
(もっと読む)
ワーク搬送装置
【課題】設備投資を低廉化し、しかも、搬送距離を大きくし得、搬送方向の自由度を向上させることも可能なワーク搬送装置を構成する。
【解決手段】自走ユニット20は、タイヤ44及び従動ローラ60、62、64、66がガイドレール18を挟持することでガイドレール18に係合した支持体30と、該支持体30と先端側アーム部材14を連結する軸部材46とを有し、該軸部材46は、支持体30(軸受部82)に形成された貫通孔84に変位自在に挿入される。バランスアーム12を構成する先端側アーム部材14にはチャック機構16が設けられ、このチャック機構16がワークを把持した際に先端側アーム部材14が鉛直下方に向かって撓むと、軸部材46が貫通孔84に沿って鉛直下方に変位する。その後、モータ42の作用下にタイヤ44が回転動作を開始すると、支持体30がガイドレール18に沿って走行を開始することに伴ってワークが搬送される。
(もっと読む)
長尺材搬送位置決め装置
【課題】搬送台の側方のどちら側からでも搬送台に長尺材を横行搬入することができ、且つ、材料の加工不能部分の生じない搬送位置決め装置を提供する。
【解決手段】ピンチローラ装置20のピンチローラ(駆動ローラ21及び従動ローラ22)で長尺材(形鋼A)を挟持した状態で、駆動ローラ21を回転駆動して形鋼Aを前方へ搬送する。形鋼Aの後方端部がピンチローラ装置20直近に達したら、フィードバー装置30のフィードバー36の前方端部に設けられた保持部32で形鋼Aの後方端部を保持し、フィードバー36を加工機械側へスライドさせ、形鋼Aをピンチローラ装置20を過ぎて前方へ搬送位置決めする。
(もっと読む)
レンズ搬送装置およびレンズ加工システム
【課題】レンズ搬送を高速で行うことのできるレンズ搬送装置を提案すること。
【解決手段】レンズ搬送装置20は、第1位置P1において上方から未加工レンズ2Aを受け取り、当該未加工レンズ2Aを第2位置P2に搬送して上方に位置するレンズホルダー11に引き渡すために用いる供給側レンズ搬送容器25と、第2位置P2において上方に位置するレンズホルダー11から加工済みレンズ2Bを受け取り、当該加工済みレンズ2Bを第3位置P3に搬送して上方に排出するために用いる排出側レンズ搬送容器26とを備えている。これらの容器25、26の退避位置P0(25)、P0(26)は第1〜第3位P1〜P3の間にあり、これらの容器25、26は二軸送り機構24によって一体として直線送りされて各位置に位置決めされる。少ない送り動作回数で、直線状の短い経路を移動させればよいので、レンズ搬送動作を短時間で行うことができる。
(もっと読む)
工作機械のワーク交換装置
【課題】ワーク交換に要する時間を短縮できる工作機械のワーク交換装置を提供する。
【解決手段】ワーク把持部12に該ワーク把持部12の軸線A方向の押圧力を加えることにより該ワーク把持部12から加工済みワークW1を取り出すとともに該ワーク把持部12に未加工ワークW2を供給する第1ワーク搬送装置16と、該第1ワーク搬送装置16に未加工ワークW2を供給する第2ワーク搬送装置17とを備える。
(もっと読む)
ワーク搬送装置及び工作機械
【課題】工作機械の周辺に配置した周辺装置に対する対応が容易で、かつ全体的高さを低く抑制することのできるワーク搬送装置及び工作機械を提供する。
【解決手段】長いガイド部材27に沿って往復動自在なスライダ33に、当該スライダ33の往復動方向に対して直交する水平な第1の軸心43回りに回動自在な第1アーム41の先端部を前記ガイド部材27よりも下方位置に備え、この第1アーム41の先端部に前記第1の軸心43と平行な第2の軸心53回りに回動自在なアーム57を備え、この第2アーム57の先端部に素材クランプ63Aと製品クランプ63Bとを互いの位置を変更自在に備え、前記第1アーム41は、前記第1の軸心43回りに回動する回動アーム47と、この回動アーム47に対して前記第1の軸心43に平行な方向へ往復動自在なスライドアーム49とを備えている。
(もっと読む)
作業具の移動装置およびローダ装置
【課題】 共通の駆動源で作業具を2軸方向に移動可能で、構成が簡略な作業具の移動装置を提供する。
【解決手段】 移動装置1は、作業具2を、レール3に沿って移動させ、かつレール3と交差する方向に移動させる。走行用駆動源7,8を搭載し、レール3上を走行する第1および第2走行体4,5と、これら第1および第2走行体4,5の間に位置し、レール3上を走行する中央走行体6と、この中央走行体6にレール3方向と交差する方向に移動自在に設けられ、作業具2が取付けられる移動部材12とを備える。一端が第1走行体4に固定され、中間部が、中央走行体6に設けた第1案内点15、移動部材12に設けた中間案内点17、中央走行体6に設けた第2案内点16の順に巻き掛けられ、他端が第2走行体5に固定された巻掛体18を設ける。
(もっと読む)
昇降装置およびガントリローダ
【課題】 ベース部材に対して中間昇降部材を昇降させ、かつ巻き掛け部材を用いた昇降伝達機構により、前記中間昇降部材の昇降に連動して作動し、この昇降と同じ方向へ同じ量だけ中間昇降部材に対して下部昇降部材を昇降させる昇降装置において、巻き掛け部材が切断した場合でも下部昇降部材を落下させないようにする。
【解決手段】 落下防止部材32と係合部34,35とを有する落下防止機構30を設ける。落下防止部材32は、ベース部材11および下部昇降部材13のうちのいずれか一方の部材である支点側部材に支点軸31回りに傾き角度変更自在に結合される。例えば、支点側部材は下部昇降部材13とする。係合部34,35は、中間昇降部材12およびベース部材11にそれぞれ設けられ、落下防止部材32に対し支点軸31を通る直線に沿ってスライド自在に係合して落下防止部材32の傾き角度を規制する。
(もっと読む)
ローディング装置を有する工作加工機並びにその工作加工機を複数備えた工作加工システム
【課題】アンローディングからローディングへ移る際の時間を省き、ローディング・アンローディング時間の短縮を図り、装置の簡素化を図った、ローディング装置を有する工作加工機を提供する。
【解決手段】切削油・切り粉飛散防止扉14上方に、昇降駆動可能なキャリア15と、複数のハンド部16aと、2分割型開閉扉14a、14bの上面にそれぞれ設けた、未加工ワーク用ハンド部16bおよび加工済ワーク用ハンド部16cとを有し、キャリア15およびハンド部16aを案内するための案内部材17を備える。
(もっと読む)
工作機械用の自動送り装置及び自動送り装置の操作方法
【課題】2種類の装置(棒材送り装置及び門型構造装入/取出装置)の問題を解決する。
【解決手段】工作機械(特に、CNC旋盤)へ材料又は半完成加工品を自動的に送り、機械加工済みの加工品を自動的に取外すための自動送り装置において、旋盤のスピンドルの背後を通って棒材の装入が可能な統合送り装置20を有する門型構造50を備えることで万能型の自動送り装置を構成する。自動送り装置は、棒材から加工品が機械加工された後に、棒材端部の除去する制御が可能である。
(もっと読む)
切断装置
【課題】定寸切断の高速化を図る。
【解決手段】切断装置1の自動丸鋸盤3は、前後2台の独立して動作可能な搬送バイス装置15,16を備える。制御装置40は、前後の搬送バイス装置15,16に、一方が定寸送りのための準備動作をしている間に他方に定寸送り動作を実行させる。その一方、定寸送り量が所定以上の場合は、後方側搬送バイス装置16は後退端に待機させ、前方側の搬送バイス装置15だけに定寸送り動作を実行させる。
(もっと読む)
ワーク給排装置
【課題】供給と排出を同時に行いながら、ワークを1個ずつ保持して強制搬送することにより、装置を小型化、且つ給排機構を簡素化でき、ワークの傷発生を防止しながら確実に搬送することができるワーク給排装置を提供する。
【解決手段】ワーク給排装置1は、第1軌道13に沿って第1保持部11を旋回させる第1アーム10と、第1軌道13上に位置する加工位置WP及び給排位置TPを通過する第2軌道23に沿って第2保持部21を旋回させる第2アーム20を備える。第1保持部11及び第2保持部21は、加工位置WP及び給排位置TPの一方から他方へ、また同時に他方から一方へワークWを搬送する。第1及び第2軌道13、23は、第1保持部11と第2保持部21の干渉を防止するように設定されると共に、加工位置WP及び給排位置TPが第1軌道13と第2軌道23との交点P1,P2に配置されて、1箇所の給排位置TPからワークWの給排を行う。
(もっと読む)
金属シート用マニピュレータ
【課題】金属シート(4)を拾い上げるためのピックアップ手段(8)を含み、前記ピックアップ手段(8)が第1ピニオン(1)および動作ヘッド(9)と連結可能なラック(3)に結合している、金属シート用マニピュレータを開示する。
【解決手段】該マニピュレータは、少なくとも第2ピニオン(2)を含み、第1ピニオン(1)および第2ピニオン(2)は、金属シート(4)の移動路に沿って配置されている。第1ピニオン(1)および第2ピニオン(2)の少なくとも一つが毎回前記ラック(3)に嵌合して、ラックを動作ヘッド(9)のある部分から別の部分に動かす。
(もっと読む)
位置決めステージとこれを用いた移送システム
【課題】アーム部材の移動の時間が短縮でき、移動時の複雑な操作が回避できる位置決めステージと移送システムを実現する。
【解決手段】X軸方向にスライダを移動する一対のX軸リニアモータを平行配置し、一対のX軸リニアモータのスライダ間に橋渡ししたブリッジ部材にY軸リニアモータを設け、Y軸リニアモータのスライダに搭載したツールを用いて加工対象となるワークに対して所定の処理をする位置決めステージにおいて、一対のX軸リニアモータに沿ってX軸方向に移動する一対の搬送スライダ部材と、搬送スライダ部材間に橋渡しされた搬送ブリッジ部材と、搬送ブリッジ部材に取り付けられてワークの搬送時にX軸方向に移動しステージの外に対してワークの受け渡しを行うX軸方向に伸びたアーム部材と、アーム部材にそれぞれ取り付けられてワークの搬送時にワークの上面を吸着する吸着手段とを備えるワーク搬送手段を具備したことを特徴とする位置決めステージである。
(もっと読む)
真空吸着装置、搬送装置、及び成形品取出機
【課題】配管や吸着部材の破損又は目詰まり等による真空異常の有無が事前に簡単に検出できるようにし、ワークの吸着保持を確実に行える成形品取出機等を提供する。
【解決手段】成形品取出機1は、成形品を吸着保持する取出ヘッド30を移動させるアーム機構部2と、取出ヘッド30に設ける吸着部材31に配管接続する真空圧発生器35と、圧縮空気供給源32と真空圧発生器35との間の配管39に設けるバルブ34と、真空圧発生器35と吸着部材31間の配管39に設ける真空圧検出器36と、成形品非吸着状態の取出ヘッド30が解放位置(C)から待機位置(A)までの復帰移動中に、一定時間、バルブ34を開いて吸着部材31に真空圧を発生させたときの真空圧検出器36で検出される真空到達度により配管39や吸着部材31の状態に起因した真空異常が発生しているか否か判断する真空異常判断手段37とを備える。
(もっと読む)
工作機械
本発明は、水平に配置された主スピンドルを有して成るCNC制御工作機械、特にCNC制御旋盤に関する。加工すべき未加工部品は、CNC制御機器に組み込まれたハンドリング装置によって、水平に加工領域部に供給され、そこから、ハンドリング装置を介して、前記水平な主スピンドルを備えたチャックに供給される。本発明による工作機械は極小ロットの加工に特に好適である。 (もっと読む)
工作機械のワークローディングシステム
【課題】 エルボ等のパイプ状ワークの一端の外径加工を行う場合に、サイクルタイムが長くなることなく芯出しを行った状態でワークを工作機械に搬入できる工作機械のワークローディングシステムを提供する。
【解決手段】 この工作機械のワークローディングシステム1は、外径を加工するパイプ状のワークWを一端が上向きとなるように支持するワーク支持装置2と、このワーク支持装置2に支持されたワークWの上部を把持して工作機械31にワークWを搬入するローダ3とを備える。前記ローダ3は、前記ワーク支持装置2に支持されたワークWを把持するときに水平方向の位置が定まった位置で把持する。前記ワーク支持装置2は、支持したワークWを、前記ローダ3で把持することによりワークWの水平方向の移動を許容可能なものである。
(もっと読む)
機械加工システム
【課題】 加工屑に起因して生じる被加工物の不具合を抑制しつつ、小型化が可能な構成を備えた機械加工システムを提供すること。
【解決手段】 機械加工システム1は、前面側で被加工物2に対して所定の加工を行う複数の工作機械3と、複数の工作機械3の相互間で被加工物2を搬送する搬送手段4とを備えている。搬送手段4は、複数の工作機械3の後面に取り付けられている。
(もっと読む)
1 - 20 / 27
[ Back to top ]