
Fターム[3C269SA13]の内容
Fターム[3C269SA13]の下位に属するFターム
撮像手段を用いるもの (39)
モデル画像を用いるもの (25)
Fターム[3C269SA13]に分類される特許
1 - 10 / 10
プログラム生成装置及びその方法
【課題】プログラミング生成装置におけるロボット自動生成処理において、編集作業が容易となるようジョイント(Joint)動作を直線に分割する。
【解決手段】ロボットの動作を制御するための動作プログラムを軌跡情報に基づき生成するプログラム生成装置1である。そして、前記軌跡情報は複数の動作点を有し、前記複数の動作点の中から適数の動作点を選択する選択手段と、前記選択された動作点を直線でつなげて直線動作に係る変更後の軌跡情報を生成する軌跡情報変更手段とを備える。
(もっと読む)
ロボット制御設定支援装置

【課題】対象ワークのCADモデルや作業内容雛形が不要で、ロボット動作の制約事項を考慮してロボット動作教示とその際の画像処理を支援する装置を提供する。
【解決手段】教示作業者との対話的な処理を行い、2次元画像・3次元データ処理部が表示した対象ワークに係る2次元画像と3次元データに対し入力に従い対象ワーク位置姿勢に対するロボット目標位置姿勢を決める画像処理を行い、制約条件算出・評価処理部が画像処理結果のロボット目標位置姿勢に従い操作されたロボットの動作の制約条件の算出評価を行い承諾入力がなければあるまで新たな入力に従い目標位置姿勢を決定する画像処理を行わせ新たな目標位置姿勢に従いロボット動作の制約条件算出評価を行い、ロボット動作モニタ部が承諾条件でのロボット動作手順を記録し、処理手順解析・再構成処理部が記録された一連の処理内容を表示し入力に従い冗長処理の統合、削除を行い再記録する。
(もっと読む)
ティーチングデータ作成方法およびティーチングデータ作成装置
【課題】所定の製造ラインで作業される新たなワークに対し、この製造ラインの特性を考慮したティーチングデータを効率的に作成することを可能にする多関節ロボットのティーチングデータ作成方法およびティーチングデータ作成装置を提供すること。
【解決手段】ワークに設定された複数の作業点のそれぞれでエンドエフェクタにより作業を行う多関節ロボットのティーチングデータ作成方法において、ティーチングデータ供給対象の多関節ロボットが前記作業点のそれぞれに対して作業するときのエンドエフェクタの各姿勢の制御データを取得し(ステップS3)、制御データの中から、ティーチングデータ作成対象のワークに設定された作業点にほぼ一致する作業点を特定し(ステップS7)、当該作業点での前記エンドエフェクタの姿勢の制御データに基づいて前記ティーチングデータを作成する(ステップS9)ことを特徴とする。
(もっと読む)
ロボットの作業プログラム作成方法、ロボットの作業プログラム作成装置、及びロボット制御システム
【課題】位置及び姿勢の教示を厳密に行わなければならず、教示作業に非常に労力を要する。
【解決手段】教示モードでは、ラフ教示点であるセンシング点においてセンシング命令が入力される(S22)。この命令とセンシング点を記憶する(S23)。狙い角・前進後退角が入力される(S24)。センシングモードでは、センシング点にロボットを移動させ(S32)、レーザセンサを検出動作させてワーク形状を取得し(S33)、位置及び姿勢を算出して作業プログラムを作成する(S35)。ワークに位置ずれが発生しない環境下において教示作業を大幅に簡略化できる。
(もっと読む)
スプレーロボットにおけるスプレー移動経路生成方法及びスプレー移動経路生成装置
【課題】スプレー塗布する位置等を基本条件として予め決定し、スプレー塗布の順序をこの基本条件に従って決定することで、入力する人によってスプレー塗布の動作経路にバラツキを発生することがなく、品質とサイクルタイムとにバラツキが発生することもない、最適なスプレー塗布の順序を決定するスプレー移動経路生成方法及びスプレー移動経路生成装置を提供する。
【解決手段】
任意のスプレー位置を選択するST15と、移動パターンを選択するST16と、移動パターンにおいて、送りピッチを設定するST19と、移動パターンの始端に対応するスプレー位置を最初のスプレー位置として選択するST20と、スプレー順序を決定するST21と、を実行することにある。
(もっと読む)
ロボットシステムに教示する方法
最初に、対象物モデルライブラリ及び作業モジュールライブラリを提供する。対象物モデルライブラリは、処理すべき実際の対象物に幾何学的に類似する少なくとも1つの対象物モデルを含む。作業モジュールライブラリは、行うべき各作業用の少なくとも1つの作業モジュールを含む。それから、処理すべき各実際の対象物に対して、対象物モデルライブラリにおける対象物モデルとの関連により、及び、対象物モデルの幾何学的パラメータの明細により、仮想対象物を定義付けする。その後、行うべき各作業に対して、作業モジュールライブラリから作業モジュールを選択すると共に、その作業パラメータを特定することにより、その操作を定義付けする。随意に、定義付けされた各仮想対象物に対して、その仮想対象物には、対応する実際の対象物を前もって撮像した少なくとも1つの二次元画像を関係づける。  (もっと読む)
(もっと読む)
ロボットの制御装置
【課題】ロボットの接触状態の判定を元に位置制御と力制御を使い分けロボットの位置や姿勢だけでなく力加減を非接触状態から接触状態まで連続的に制御、教示し、再生することができるロボットの制御装置を提供する。
【解決手段】先端にエンドエフェクタを取り付けたロボット101を教示装置108により誘導して接触を伴う作業を教示し、教示した作業を再生するロボットの制御装置において、作業の教示時に、エンドエフェクタまたは把持対象物103が作業対象物104に接触していない場合にはロボット101を位置制御にて誘導し、教示点の登録の際にロボット101の位置を記憶し、エンドエフェクタまたは把持対象物103が作業対象物104に接触している場合にはロボット101を力制御で誘導し、教示点の登録の際に力の大きさを記憶する。
(もっと読む)
ロボットシステム
【課題】組立嵌合作業の教示の負担を軽減すると共に、嵌合作業の精度を向上させ作業を効率化でき、教示作業時と再生運転時の環境の変化に対するロバスト性を上げることが可能なロボットシステムを提供する。
【解決手段】ロボットコントローラ102は、暫定的に教示されたワーク把持点および嵌合点、ワーク把持点と嵌合点との間の経由点の各位置と、ワーク把持点および嵌合点におけるエンドエフェクタ104の姿勢と、ロボット101周辺に存在する障害物の位置とから障害物を回避して嵌合を行う作業プログラムを生成し、教示データ記憶部1023に記憶させる姿勢演算部1024を備える。
(もっと読む)
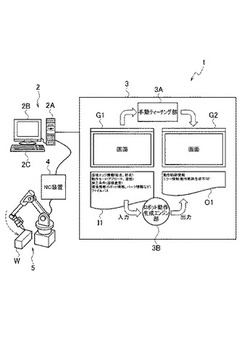
教示装置及び教示方法
【課題】ロボットの教示を実際の目視によって行い難いような場合であっても教示作業を確実に行うことができる教示装置及び教示方法を提供する。
【解決手段】ワークと関連する動作位置をロボットへ教示する教示装置1において、ロボット300に設置された力検出部310が検知するワーク把持部の受ける3次元の力情報を入力する力情報入力手段140と、ロボットの作業領域を撮影するカメラ130からの画像データを取得する画像情報入力手段152と、ロボット教示用の操作指令入力信号を入力する操作指令入力手段122を備えると共に、力情報と、画像データと、操作指令入力信号に基づき、教示の際にワークを実際に撮像した画像及びワーク把持部に作用する3次元の力情報を同時に表示する画像表示手段を備えている。
(もっと読む)
移動体の位置設定装置とその位置設定方法
【課題】 目視に加えて機械的な検知によって移動体を母体に非常に近接させることができる位置設定装置を提供すること。
【解決手段】 母体模型10に近接させる移動体模型20に移動体模型近似部201〜205を設定し、この移動体模型近似部201〜205に近接領域211〜215を設定し、前記移動体模型20を移動させる携帯式操作盤30を操作して移動体模型20を前記母体模型10に向けて移動させ、母体模型10の母体模型近似部101,102が前記移動体模型20に設定した移動体模型近似部201〜205に侵入すると、前記携帯式操作盤30に母体模型近似部101,102が近接領域211〜215に侵入したことを表示する。
(もっと読む)
1 - 10 / 10
[ Back to top ]