
Fターム[3C269SA14]の内容
数値制御 (19,287) | 教示方法、教示手段 (478) | 画像装置を用いて教示するもの (74) | 撮像手段を用いるもの (39)
Fターム[3C269SA14]に分類される特許
1 - 20 / 39
ロボットの位置姿勢補間方法及びロボットの制御装置
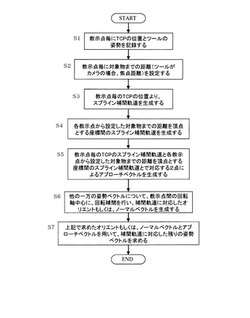
【課題】ロボットの手先の姿勢が一定の条件を満たすように補間できるロボットの位置姿勢補間方法を提供する。
【解決手段】各教示点を通過する移動軌跡がスプライン曲線となるように補間点を生成し(S3)、各教示点毎に、教示点と同じ座標系における撮像対象物の座標を求め、各教示点に対応する撮像対象物の座標間を、スプライン曲線により補間して補間点を生成する(S4)。教示点側の補間点を始点,撮像対象物側の補間点を終点とするアプローチベクトルを全ての補間点に対して求め(S5)、2つの教示点間の各補間点におけるノーマルベクトルの回転角を補間すると(S6)各補間点に立つアプローチ,ノーマルベクトルの外積よりオリエントベクトルを求め(S7)各補間点と3つの姿勢ベクトルの座標とから各補間点における手先の姿勢を決定する。
(もっと読む)
動作プログラムの自動生成プログラムおよび装置

【課題】カメラ等の画像データ入力装置を作業ヘッド近傍に備えることなく、簡易に且つ正確に動作プログラムを作成することができる自動生成プログラムおよび装置の提供。
【解決手段】作業ヘッドを作業対象物に対して相対移動させて所望の作業を行わせるための動作プログラムを自動生成するプログラムであって、作業対象物または領域の形状データを入力可能とする基準データ入力画面を表示する第1のステップと、作業対象物または領域の画像データを読み込む第2のステップと、前記読み込んだ画像データの歪みを補正する第3のステップと、前記補正された画像データを背景として移動経路を指定可能とする移動経路入力画面を表示する第4のステップと、前記入力画面で指定された移動経路に基づき動作プログラムを自動生成する第5のステップと、を有することを特徴とする自動生成プログラムおよびそれに関する装置。
(もっと読む)
レーザ加工ロボットの教示方法及び教示装置
【課題】レーザ加工ロボットの教示作業を容易且つ正確に行えるようにする。
【解決手段】測定レーザと加工レーザとを出力するレーザスキャナを有し、加工レーザをワークに照射してレーザ加工を行うレーザ加工ロボットの教示方法が、ワーク上の基準照射位置を基準として予め定められた基準図形に基づき測定レーザをワーク上に照射する際に、測定レーザの照射位置を制御する制御手順S4と、レーザスキャナから照射された測定レーザが、ワークにおいて反射された反射光を測定する測定手順S5と、反射光と基準図形を比較し、基準照射位置におけるワークの表面の傾斜を算出する傾斜算出手順S6と、傾斜算出部が算出した傾斜から前記ロボットの姿勢に関する教示データを作成するデータ作成手順S7と、を有する。
(もっと読む)
曲面塗装装置
【課題】曲率が一定でない曲面の塗装面に対しても均一な厚みの塗膜が得られる曲面塗装装置を提供する。
【解決手段】曲面塗装装置100は、高速で塗料の吐出と吐出停止が切り替え可能で、且つ塗料の吐出時間と吐出停止時間の制御可能なノズル2と、ノズル2が取り付けられ、該ノズル2の塗料吐出口を被塗物1の塗装面に対向するように該ノズルの移動可能なロボットアーム4と、ロボットアーム4を制御するロボットコントローラ5と、ノズル2の塗料吐出時間と吐出停止時間の制御可能なノズル駆動回路7と、ロボットコントローラ5及びノズル駆動回路7を制御する主制御装置6とを備え、主制御装置6は、被塗物1の表面を仮想の三次元マトリクス面によって多数の微小塗面12に分解し、各微小塗面に対してノズル2の塗料吐出口が対向するようにロボットコントローラ5を制御すると共に、ノズル2が対向する微小塗面12の面積に応じた塗料の量を吐出するようにノズル駆動回路7を制御する。これにより、曲面の塗装面に対する塗膜の厚みを均一にする。
(もっと読む)
ロボット制御装置、ロボットおよびロボット制御装置の教示方法
【課題】撮影動作の教示操作が煩雑になるのを抑制することが可能なロボット制御装置を提供する。
【解決手段】このロボットシステム100は、教示位置の入力と、少なくとも教示位置に対応付けられるコマンド情報の選択とを受け付けて教示位置とコマンド情報とを組み合わせた教示データを作成する教示装置3と、教示データに基づいて動作指令を生成する指令生成部24とを備え、教示装置3により選択されるコマンド情報は、教示位置と、予め設定された教示位置に基づく補助的な動作をロボットに動作させるための補助情報とに対応付けられたステレオ視コマンドを含む。
(もっと読む)
ロボット教示システム
【課題】作業効率の向上化が図れ、なお且つ、危険も伴わないロボット教示システムを提供することを目的としている。
【解決手段】ワークWに対して溶接等の作業を行うロボット1と、前記ロボット1の作業現場を撮影可能な複数の多視点画像撮影カメラ2と、前記各多視点画像撮影カメラ2によって撮影された画像を取得し、且つ、その取得した画像から前記ロボット1の作業現場の任意視点画像を生成する画像生成手段と、前記生成された任意視点画像を表示する表示手段と、前記表示された画像を用いて前記ロボット1の作動を指示可能な指示手段と、前記指示手段によって指示された作動に応じて前記ロボット1を制御するロボット制御手段とを有してなる。
(もっと読む)
特徴点抽出装置及びこれを用いた動作教示装置、動作処理装置
【課題】外部出力装置に教示すべき特徴点を必要最小限に抑えて抽出する。
【解決手段】特徴点抽出装置3として、外部出力装置4の処理動作に伴う動作点の位置情報を予め決められた取込時間間隔毎に時系列で取り込む動作点取込手段5と、前記取込時間間隔よりも長い分割時間間隔dt毎に前記動作点取込手段5にて取り込まれた動作点に基づく動作軌跡を近似直線L(LAB、LBC)として演算する近似直線演算手段6と、この近似直線演算手段6にて演算された近似直線Lの取り込まれた動作点に対する近似精度を予め決められた許容範囲内に設定する近似精度設定手段7と、前記近似直線演算手段6にて演算された近似直線Lの近似精度が前記許容範囲内であるときに、前記近似直線Lを特定する変化点を外部出力装置4に教示すべき特徴点として抽出する特徴点抽出手段8とを備える。これを用いた動作教示装置、動作処理装置をも対象とする。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
ロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システム
【課題】ティーチング作業をより簡略するとともにティーチング時間のさらなる短縮を可能とするためのロボット制御システムの教示用補助具、その教示用補助具を用いた教示方法、およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】撮像装置を用いて教示を行うことが可能なロボット制御システムの教示用補助具の一実施形態であるティーチングツール50は、角錐面52a、52b、52cの色が互いに異なる三角錐部52を有するツール本体51と、このツール本体51に連結されたハンドル54とを備える。
(もっと読む)
教示ライン補正装置、教示ライン補正方法、及びそのプログラム
【課題】基準部位の相関関係が異なっていた場合も、その誤差の影響を緩和し、ティーチングデータを精度良く補正するための教示ライン補正装置、教示ライン補正方法、及びそのプログラムを提供する。
【解決手段】予め設定された基準部位の第1基準位置aと第2基準部位の第2基準位置bとを通る線を含む平面であり、且つ、第3基準部位の第3基準位置cで決定される第1平面を規定し、検出した第1基準部位の位置a´と、検出した第2基準部位の位置b´とを通る線を含む平面であり、且つ、検出した第3基準部位の位置c´で決定される第2平面を規定し、第1基準部位を原点とし、原点の前記第1基準部位の前記第1基準位置が、検出した原点の前記第1基準部位の位置と同じ位置になり、且つ、該第1平面が該第2平面と同一平面上となる補正量を算出し、該算出した補正量に基づいて、動作ポイントが教示された基準座標を補正する教示ライン補正部とを備える。
(もっと読む)
ロボットティーチング装置
【課題】カメラを接続して映像を取り込んで行うティーチングはもちろん、カメラを使用しないオフライン作業においても、簡単にロボットのティーチングと同時にプログラミングができるロボットティーチング装置を提供する。
【解決手段】ロボットティーチング装置は、画像データ入力機能、ロボット動作プログラム作成機能及びロボット位置座標データ作成機能を有するコンピュータ、入力される画像データを表示するディスプレイ、及び上記ディスプレイに表示された画像の位置を指定するポインティングデバイスを備えたロボットティーチング装置において、上記コンピュータは、上記ポインティングデバイスにより指定された上記ディスプレイに表示された画像の位置情報に基づいて、ロボット位置座標データを作成する。
(もっと読む)
ロボットの制御装置及びロボットのティーチング方法
【課題】ロボットをティーチングする際に並行して撮像対象物までの距離計測を行うロボットの制御装置を提供する。
【解決手段】初期位置で撮像される画像フレームの中心周りで注視領域を設定し、初期位置の座標を移動元座標とする。入力された移動方向に対し、注視領域が撮像フレームに収まるようカメラを上記移動方向にTB(ベクトル)だけ微小移動させ、移動元座標,移動先座標(移動後の座標)からカメラの移動距離TC(ベクトル)を計算し、移動先座標,移動元座標で夫々捉えた画像から注視領域の移動距離を求めてカメラ間視差とし、カメラの焦点距離,移動距離,視差から三角測量法で移動元座標から注視点Pcまでの撮像距離を求め、入力された移動方向と撮像距離とから移動先座標を始点,撮像距離を半径としてカメラが注視点方向を常に向いた状態での目標円弧軌道を計算し、カメラを前記軌道に沿って移動させるようロボットに指令を出力する。
(もっと読む)
ロボット教示システム
【課題】ロボットの通過位置が加工位置であるか退避位置であるかを簡単に設定することができ、ロボットの教示作業に必要な時間を短縮することが可能なロボット教示システムを提供する。
【解決手段】ロボット教示システム10は、ロボット11と、ロボットコントローラ12と、ツール13と、制御部20とを備えている。制御部20は、加工対象Wの図面データ25を読み込む図面データ読込部21と、通過位置データ26、加工位置データ27、および退避位置データ28を入力するための入力部22と、ロボット11の通過位置を設定する通過位置設定部24とを有している。通過位置編集部30は、ロボット11の通過位置が加工位置であるかまたは退避位置であるかを設定する。プログラム作成部31は、移動プログラム32を作成し、出力部33により移動プログラム32がロボットコントローラ12へ送信される。
(もっと読む)
ロボットツールの制御方法
【課題】ロボットシステムを制御する方法は、ロボットシステムの移動可能な機構に支持されたツールを用意する工程と、ホルダに支持されたワークを用意する工程と、ワークの画像を生成する工程と、該画像から、ワークの特徴に関するデータを抽出する工程と、該画像から抽出されたデータを用いて、ワークに沿った連続的3次元経路を生成する工程と、該経路に沿ってツールを移動させる工程と、を含む。  (もっと読む)
(もっと読む)
ロボットの原点復帰装置
【課題】ワークの形状を入力せずとも、動作点以外の位置で停止したロボットアームをワークとの衝突を回避しながら原点位置に戻す。
【解決手段】各動作点について、停止位置からワークの中心位置のベクトルと停止位置から動作点までのベクトルの内積を演算し、内積値が0未満のとき、その動作点を移動目標点に設定する。また、上記2つのベクトルの内積が0以上のとき、停止位置に最も近い動作点を移動目標点に設定する。そして、停止位置から移動目標点にロボットアームを移動させた後、動作点を順に辿って原点位置に復帰させる、
(もっと読む)
作業ロボットと、ティーチング方法
【課題】作業ロボットを設置する作業の効率の低下を抑制し、効率よくティーチングできる、作業ロボット及びティーチング方法を提供することを課題とする。
【解決手段】ロボットアーム10に装着される溶接機20aを、ワークWkに対して作業可能な位置に配置したときの溶接トーチ24のヘッド位置情報をコントローラ30に教示する。そして、コントローラ30は、教示されたヘッド位置情報を、ワークWkの作業部位を示す作業位置情報として、ティーチングデータを作成することを特徴とする作業ロボットとした。
(もっと読む)
産業用ロボットのティーチングのための方法及びそれに対応して装備された産業用ロボット
【課題】キーボードまたはジョイスティックによるプログラミングによらず、簡単に短時間でティーチング可能な方法を提供する。
【解決手段】少なくとも一つの可動の関節式アーム14を有する産業用ロボットのための、運動プロセスをティーチングする方法であって、以下のステップに基づいて行う。1.関節式アーム14の先端手首に測定システム22の取り付け。2.関節式アーム14の自由端にエンドエフェクタ20であるハンドリング器具28の取り付け。3.オペレータによる前記ハンドリング器具28の手動操作。4.測定システム22によりハンドリング器具28の位置を検知。5.検知された位置を6次元で座標データへ変換。6.ロボットコントローラに座標データを記憶。
(もっと読む)
ロボットへのティーチング装置とティーチング方法
【課題】 カメラの配置位置に起因する誤差を抑制し、ロボットに動作姿勢を精度よく教示することができる技術を提供する。
【解決手段】 第1部品の組付部に対応する位置に設けられたカメラ10を有するパレット4に、第2部品の組付部を模した模擬部品8が設けられているマスタ部品が6固定された状態でカメラ10が撮影した第1画像から第2部品の目標位置を計算し、マスタ部品6が固定されていない状態のパレット4が第1部品の配置位置に配置されるとともに第2部品がロボット16によって保持された状態でカメラ10が撮影した第2画像から第2部品の実際位置を計算し、第2部品の目標位置と実際位置との間の偏差が所定の値よりも小さくなるときの姿勢を、第1部品に第2部品を組み付つける組み付け姿勢として、ロボット16に教示する。
(もっと読む)
1 - 20 / 39
[ Back to top ]