
Fターム[3C269SA29]の内容
Fターム[3C269SA29]の下位に属するFターム
移動速度、加速度の教示 (16)
力、トルクの教示 (11)
補助動作の教示 (5)
姿勢の教示 (44)
Fターム[3C269SA29]に分類される特許
1 - 11 / 11
ロボット教示方法、ロボット教示装置およびプログラム
【課題】ロボットが実行する作業に関する情報を簡便に教示できるロボット教示方法を提供する。
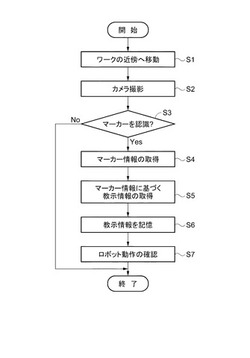
【解決手段】ロボット教示方法は、ワーク10に対して行なう作業に関わる動作をロボット1へ教示するための方法であって、ロボット1に備えられたカメラ6によって、マーカー15を有するワーク10の撮像を取得する撮影ステップ(ステップS2)と、当該撮像からマーカー15を検出する検出ステップ(ステップS3)と、マーカー15を解析して、ロボット1が動作をするための教示情報を取得する解析ステップ(ステップS4、S5)と、教示情報を記憶する記憶ステップ(ステップS6)と、を有する、ことを特徴とする。
(もっと読む)
ロボットシステムの教示データ作成方法及びロボットシステムでの溶接方法

【課題】断続溶接を確実に行うことができると共に、溶接作業時間を可及的に短くすることのできるオフライン教示データの作成方法を提供する。
【解決手段】本発明に係るロボットシステム1のオフライン教示データの作成方法は、断続溶接の溶接予定線に沿って設定されている溶接区間及び非溶接区間の順番及び区間長さ比を、溶接予定線を溶接する際にスライダ7が移動するスライダ移動線に適用することで、当該スライダ移動線上に、溶接区間に対応する第1スライダ移動区間と、非溶接区間に対応する第2スライダ移動区間とを設定しておき、少なくとも1つ以上の溶接区間での溶接が終わった際に、スライダ7が当該溶接区間に対応する第1スライダ移動区間に隣接する第2スライダ移動区間内に位置するように、教示データを作成する。
(もっと読む)
ロボットの制御方法およびロボット制御装置
【課題】ユーザ座標系がポジショナに搭載又はマニピュレータに把持されたワークの形状に合わせて設定されている場合、ワークの位置姿勢が変わるとユーザ座標系の再設定が必要になる。
【解決手段】ワークWの形状に応じた軸方向を有するユーザ座標系Cuの設定する際に、特徴点E1〜E3の位置教示に加えて、特徴点の位置座標値を記憶する座標系を、少なくともワーク座標系を含む複数の座標系の中から選択する。特に、ユーザ座標系Cuを、ポジショナP(またはマニピュレータMとは別のマニピュレータ)に搭載されたワークWの形状に応じて設定するときは、特徴点の位置座標値をワーク座標値で記憶する。このことによって、(b)のように、ポジショナPが回転してワークWの位置姿勢が変化したとしても、ユーザ座標系Cuが追従する。すなわち、ユーザ座標系を再設定することなく、そのまま利用することができる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ロボット軌跡生成装置
【課題】ロボット軌跡生成装置を提供する。
【解決手段】疑似3次元空間を設定し、読み込んだ2次元データをこの3次元空間での特定の面に貼り付ける。この結果、3次元データが生成され、この3次元データに基づいてロボットのツール軌跡を生成する。2次元データが複数の面に跨る場合も、一筆書きでのロボットのツール軌跡を生成する。
(もっと読む)
ロボットの教示再生装置および教示再生方法
【課題】過大力とタクトタイム増加を防ぎ、力制御に関する知識のない教示者でも直感的な操作で簡単に嵌合などの接触作業を成功率高く教示・再生できるようにする。
【解決手段】教示ペンダントに力制御設定手段と力制御手動操作手段と力制御状態表示手段と作業状態保存手段を備え、力制御設定手段は座標系の各軸方向それぞれに対する操作モード選択手段を備え、テスト運転で動作プログラムを再生している最中に、力制御手動操作手段は操作モードにしたがって位置または力指令を動作プログラムの動作に重畳して増減し動作を修正する。この重畳された修正動作によりロボット作業を適切な力加減により、オペレータの判断で作業を成功に導く。この時のデータをロボットの修正された動作プログラムデータとして再度登録し直す。再登録された動作プログラムはオペレータが適切に誘導したデータであるため成功確率が高いティーチングデータとなる。
(もっと読む)
溶接ロボットの制御装置
【課題】 基本3軸などのイナーシャの大きい軸を使用することなくイナーシャの小さい軸のみを使用してウィービング動作させるようにすることで、高い軌跡精度、高い周波数でウィービングを行うことができるようにするとともに、ウィービング動作する平面の制限をなくし任意のトーチ姿勢でウィービング動作させるようにすることで、ワークとの干渉を防止し煩わしい教示作業を不要とする。
【解決手段】 溶接ロボットの手首3軸のうち、最先端の軸を除く直交する直交2軸によって溶接トーチ先端が動く平面に対して垂直な方向に溶接トーチ先端を移動させ得るウィービング軸が、溶接ロボットに追加される。コントローラは、ウィービング移動量を、直交2軸およびウィービング軸それぞれの駆動量に変換する。直交2軸およびウィービング軸をそれぞれ、変換された対応する駆動量だけ駆動させる駆動指令を溶接ロボットに与えることで、当該溶接ロボットをウィービング動作させる。
(もっと読む)
アーク溶接ロボットの制御装置
【課題】実溶接条件値が許容範囲を逸脱した場合等に、その要因であるワークの状態あるいはロボットの位置姿勢を、実物と照らし合わせて把握することができるアーク溶接ロボットの制御装置の提供。
【解決手段】作業プログラムに従ってトーチTを移動して溶接作業を実行し、溶接作業中に実溶接電流値および実溶接電圧値のうち少なくともいずれか一方の実溶接条件値Wdを所定周期毎にサンプリングして保存するアーク溶接ロボットの制御装置RCにおいて、データ保存部23は、実溶接条件値Wdと共に実溶接条件値Wdのサンプリング位置を特定する位置特定情報Idを保存する。表示出力部22は、実溶接条件値Wdおよび位置特定情報IdをティーチペンダントTPに表示する。位置再現部24は、選択された位置特定情報Idに基づいてサンプリング位置を特定し、この特定したサンプリング位置にトーチTを移動させる。
(もっと読む)
ロボット制御装置
【課題】1つのプログラムで複数の制御対象の非同期制御を可能にし、作業線の長さ又は移動速度が異なっても各ロボットが設定された移動速度で作業線上を移動することができるロボット制御装置を提供する。
【解決手段】非同期制御部23は、第1工程部25、第2工程部26及び第3工程部27を備える。第1工程部は、主制御対象Ca及び従制御対象Cbが教示点に到達する際の移動時間を算出して教示点に最短時間で到達する先行制御対象を決定する。第2工程部は、最短時間に基づいて後行側の制御対象が到達すべき教示点を再設定する。第3工程部は、両方の制御対象を目標教示点に同時に到達させた後、どちらの制御対象も最終教示点へ到達していない時は非同期制御を続行し、最終教示点へ到達している時は先行側の制御対象を待機させつつ後行側の制御対象を最終教示点に到達させて非同期制御を終了する。
(もっと読む)
産業用ロボット制御装置
【課題】ワークの側面やロール面に対して肉盛溶接等の処理を行う場合、一筆書きのような1本の螺旋状に処理を行うことにより、ワークの側面やロール面に均一な処理を行うことができるとともに、その作業を実行するプログラムを簡単に教示できる産業用ロボット制御装置を提供する。
【解決手段】
螺旋肉盛動作のためにマニピュレータ及びポジショナの手動運転が行われて入力された開始点Ps,終了点Peの教示データ等は補助記憶装置に格納される。ロボット制御装置のCPUは螺旋命令のTCPの移動速度V、螺旋ピッチPi等に基づき補間演算して教示された開始点Psから終了点Peの螺旋軌跡上の補間点位置(姿勢)をXn=Rs・cos(θn)、Yn=Rs・sin(θn)、Zn=θn・κで求める。CPUは算出した螺旋軌跡の補間点毎の各位置姿勢に基づいてマニピュレータの各軸値毎の動作量を求めて、マニピュレータ、ポジショナを制御する。
(もっと読む)
ロボット言語処理装置
【課題】ロボット言語の表示・編集を行う際に教示装置やプログラミングペンダントに表示されるのは、従来、ロボット言語の中間コードをキャラクタ表現に変換したものだけであり、ロボットの動作を直感的に把握することができず、言語の習得に時間を要し、教示後にロボットを実際に動かして作成したプログラムの正当性を確認する必要があった。
【解決手段】グラフィカル表示が可能でありポインティングデバイスによってその表示画面中の位置を指定できる表示装置と、ロボットプログラムを格納するメモリと、ロボットプログラムを参照して、作業区間及びエアーカット区間を連続した線として表示装置に表示し、ポインティングデバイスにより表示画面に表示中のいずれかの線が指定されたときには、その線における作業内容の種類を表示画面に表示するグラフィカル言語処理部とを設け、グラフィカル・ユーザ・インタフェースに基づく教示を可能にする。
(もっと読む)
1 - 11 / 11
[ Back to top ]