
Fターム[3C269SA33]の内容
Fターム[3C269SA33]に分類される特許
1 - 20 / 44
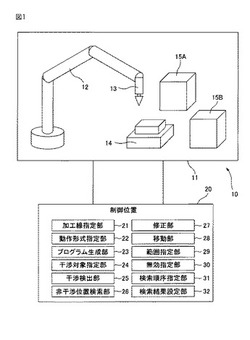
ロボットプログラミング装置
【課題】オフラインロボットプログラミング装置で作業者の修正作業を排除する。
【解決手段】ロボットプログラミング装置(10)は、ワーク(14)の三次元モデル上で加工線(41)を指定する加工線指定部(21)と、加工線に基づいて生成される教示点の動作形式等を指定する動作形式指定部(22)と、加工線および動作形式等に基づいてロボット(12)のプログラムを生成するプログラム生成部(23)と、ワークに直接接触するツールの一部分以外のツール非加工部位を干渉対象として指定する干渉対象指定部(24)と、教示点におけるロボット等とワーク等との干渉を検出する干渉検出部(25)と、干渉時にロボットの位置からツール先端点を並進移動することにより、ロボット等とワーク等とが干渉しない非干渉位置を検索する非干渉位置検索部(26)と、検索結果に基づいて教示点の位置を修正する修正部(27)とを含む。
(もっと読む)
ロボットの制御方法およびロボットの制御装置

【課題】目標位置におけるツールの向きを決定するための変数の値を設定する際におけるユーザの作業負担を軽減しつつ、ロボットの移動時間の短縮を図る。
【解決手段】ユーザにより、ツールの所定軸まわりの回転角度が任意変数として指定されると、コントローラは、その所定軸まわりの回転角度をコントローラ側で任意の値に設定可能な任意変数として設定する。コントローラは、ツールの先端が現在位置から目標位置に移動する際に要する移動時間と、移動後のツールの先端位置の目標位置に対する位置誤差とに基づく評価指標を設定し、その評価指標を最適化することで任意変数の値を決定する。コントローラにより上記各処理が実行されることにより、目標位置におけるツールの向きが、ロボットの移動時間が極力短くなるようなものに自動的に決定される。
(もっと読む)
ロボットの外部軸の計測方法、ロボットの教示データ作成方法、およびロボットのコントローラ
【課題】ポジショナ回転軸のロボットに対する相対的な位置姿勢を高精度に計測する。
【解決手段】
ロボット10に作業されるワークWを把持するポジショナ12の回転軸Arまたは直動軸の該ロボット10に対する相対的な位置姿勢を計測するロボット10の外部軸の計測方法であって、ポジショナ12の回転軸Arまたは直動軸に対する所定の位置に定義された計測点Pmにロボット10の基準点Ptが手動によって位置合わせされた状態の該ロボット10の姿勢を、基準点Ptが計測点Pmに位置合わせされた状態を維持しつつ計測姿勢に変更する。計測姿勢として、(1)関節10a〜10fそれぞれにおける、ポジショナ12が把持するワークWに対して作業を実行するときの作業姿勢時の関節値と計測姿勢時の関節値との間の差分値と、(2)関節10a〜10fそれぞれに対して予め定義されている重み値とに基づいて、作業姿勢に対する類似の程度が高い姿勢を決定する。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
アーク溶接ロボットにおいてトーチ姿勢の教示が煩雑である。
【解決手段】
ロボット制御装置RCは、トーチTの姿勢を規定するトーチ姿勢ファイルを作成するCPUと記憶部を備える。トーチ姿勢ファイルは、溶接線上の教示点または溶接開始命令の1パラメータとして設定される。ロボット制御装置RCは、作業プログラムを再生する際、トーチ姿勢ファイルが設定された教示点、またはトーチ姿勢ファイルが設定された溶接開始命令が有効となる教示点におけるトーチ姿勢を算出する。角度パラメータを、作業プログラムとは別のファイルとすることで、一度教示したトーチ姿勢の再利用を可能とすると共に修正も容易となる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
基準面を設定して狙い角等のトーチ姿勢を数値で教示あるいは表示するアーク溶接ロボット制御装置では、溶接線を規定する教示点の位置を修正したときに、基準面を算出するための補助点も修正する必要がある。
【解決手段】
ロボット制御装置RCは、溶接線を規定する各教示点と、基準面を算出するための補助点とを、対にして記憶する記憶部を備える。ロボット制御装置RCは、溶接線上の教示点の位置変更があったとき、位置変更があった教示点と対の関係にある補助点を、前記位置変更があった教示点の修正分を補正して自動算出するCPUを備える。本来の溶接線の教示修正結果に応じて基準面を算出するための補助点も自動修正されるので、教示修正時間を大幅に短縮できる。
(もっと読む)
アーク溶接ロボット制御装置
【課題】
作業プログラムの教示修正時に、教示データ或いは溶接区間に応じて最適な座標系が自動設定されることにより、教示修正における座標系選択に必要な操作を低減することができるアーク溶接ロボット制御装置を提供する。
【解決手段】
ロボット制御装置RCは、マニピュレータ10を手動操作するためのテーブル座標系Cw、溶接線座標系を作業プログラムに関連付けて記憶する。ロボット制御装置RCは、作業プログラムの教示修正時にマニピュレータ10を手動操作するティーチペンダントTP、及び、教示修正時に作業プログラムと関連付けされたテーブル座標系Cw、溶接線座標系を自動設定する。ロボット制御装置RCは、教示修正時に、ティーチペンダントTPによる操作指令があったとき、設定したテーブル座標系Cw、溶接線座標系でマニピュレータ10を制御する。
(もっと読む)
ロボット軌跡生成装置
【課題】ロボット軌跡生成装置を提供する。
【解決手段】疑似3次元空間を設定し、読み込んだ2次元データをこの3次元空間での特定の面に貼り付ける。この結果、3次元データが生成され、この3次元データに基づいてロボットのツール軌跡を生成する。2次元データが複数の面に跨る場合も、一筆書きでのロボットのツール軌跡を生成する。
(もっと読む)
オフラインティーチング方法
【課題】溶接システムにおけるオフラインティーチングを、操作の熟練を要することなく、高精度で、実施することができるオフラインティーチング方法を提供する。
【解決手段】
溶接線方向をY方向、被溶接材1の面に垂直の方向をZ方向、Y方向及びZ方向に垂直の方向をX方向とする3次元直交座標系を設定する。そして、前回のステップから現ステップを向く前段座標系として、XAYAZAの座標系Aを設定し、現ステップから次順のステップを向く後段座標系として、XBYBZBの座標系Bを設定する。よって、前回のステップから現ステップまでの溶接線セグメントはYA方向となり、現ステップから次順のステップまでの溶接線セグメントはYB方向となる。このワークを基準とする座標係で溶接線を規定し、オペレータがこのワーク座標上で、トーチ移動量を指定する。
(もっと読む)
ロボット制御システム
【課題】
手動運転時において、レーザセンサのセンシング点を教示しやすいロボット制御システムを提供する。
【解決手段】
ロボット制御システム10はレーザセンサLSのカメラ座標系の視野範囲及びツール座標系とカメラ座標系の変換行列を記憶するEEPROMを備える。又、ツール座標系の第1制御点を制御対象とする第1モードから、カメラ座標系の第2制御点を制御対象とする第2モードに外部操作により切り替える切替キーを備える。ロボット制御装置RCのCPUは、第2モードでは、ティーチペンダントTPによる操作がされた際、変換行列に基づいて第2制御点をレーザセンサLSの制御点としてマニピュレータM1の位置姿勢制御を行う。
(もっと読む)
溶接ロボットの制御装置
【課題】 基本3軸などのイナーシャの大きい軸を使用することなくイナーシャの小さい軸のみを使用してウィービング動作させるようにすることで、高い軌跡精度、高い周波数でウィービングを行うことができるようにするとともに、ウィービング動作する平面の制限をなくし任意のトーチ姿勢でウィービング動作させるようにすることで、ワークとの干渉を防止し煩わしい教示作業を不要とする。
【解決手段】 溶接ロボットの手首3軸のうち、最先端の軸を除く直交する直交2軸によって溶接トーチ先端が動く平面に対して垂直な方向に溶接トーチ先端を移動させ得るウィービング軸が、溶接ロボットに追加される。コントローラは、ウィービング移動量を、直交2軸およびウィービング軸それぞれの駆動量に変換する。直交2軸およびウィービング軸をそれぞれ、変換された対応する駆動量だけ駆動させる駆動指令を溶接ロボットに与えることで、当該溶接ロボットをウィービング動作させる。
(もっと読む)
アーク溶接ロボットの制御装置及びプログラム
【課題】溶接線倣いが適用できないワークに対しても溶接トーチの少なくとも狙い角のトーチ姿勢の自動調整ができ、ロボット言語プログラミングが不要となり、1つの命令により、数値指定に基づいて所望のトーチ姿勢が得られるアーク溶接ロボットの制御装置を提供する。
【解決手段】制御装置10は、1つの指令に応じてマニピュレータM1を駆動制御し、指定距離に基づいてレーザ変位センサLSを、第1センシング点から第2センシング点に移動させる。制御装置10は指令に応じてレーザ変位センサLSが取得した両センシング点の検出結果に基づき溶接線座標系を演算し、溶接線座標系に基づきマニピュレータM1の位置・姿勢を演算し、位置・姿勢に基づき逆演算してマニピュレータM1の各軸角度を求め記憶する。
(もっと読む)
ロボットの教示装置、およびロボットの制御装置
【課題】ロボットのハンドツールに作用する力とモーメントとが略ゼロである、ハンドツールによって部品を把持してワークに組付ける動作をロボットに短時間で教示する。
【解決手段】ハンドツールを備えたロボットに動作を教示する教示装置であって、部品組付け方向と直交する方向にハンドツールを平行移動させて該ハンドツールの位置を調整する平行移動操作手段60a〜62bと、ハンドツールを組付け方向と直交する方向に延びる回転中心線を中心として回転させて該ハンドツールの姿勢を調整する回転操作手段64a〜66bと、ハンドツールに作用する力とモーメントを検出する力覚センサと、ハンドツールに作用する力とモーメントとが略ゼロの該ハンドツールの位置と姿勢とを作業者が特定するときにすべき平行移動操作手段と回転操作手段に対する操作の情報を、力覚センサの検出結果とハンドツールの位置と姿勢とに基づいて表示する表示手段50とを有する。
(もっと読む)
ロボットの教示データを作成する方法およびロボット教示システム
【課題】ロボットの教示データを作成する方法およびロボット教示システムにおいて、ロボットアームを含むロボットの教示を簡単に行うことができるものを提供する。
【解決手段】単眼カメラ30およびステレオカメラ40が、教示者10の手首22および手21を含む教示画像を取得する(教示画像取得ステップ、ステップS1)。制御装置200は、教示画像に基づいて、手首22の位置および向きを表す手首座標を決定し(手首座標決定ステップ、ステップS2)、手首座標に基づいて、ロボットアーム110の動作を教示するロボットアーム教示データを作成する(ロボットアーム教示データ作成ステップ、ステップS11)。
(もっと読む)
ロボット制御方法、ロボット制御プログラムおよびロボット制御方法に用いられるティーチングペンダント
【課題】作業者がティーチングペンダントなどを操作して実際のロボットハンドの位置や向きの変更を繰り返すティーチング作業を行うことなく、自動的にティーチングを行うことが可能なロボット制御システムの教示方法およびその教示方法によって教示を行うロボット制御システムを提供する。
【解決手段】
教示方法の一実施形態は、トレイ20のマーカー23が含まれるように可搬型カメラ8で撮像する第1撮像工程と、その画像からマーカー23を検出して、トレイ20毎に予め登録されているデータとの照合などの判断を行う第1画像処理工程と、該当するマーカー23に応じた初期位置へロボットハンド31を移動させる初期移動工程と、ロボットハンド31の小型カメラ34によってマーカー23の少なくとも1つが含まれるように撮像する第2撮像工程と、その画像からマーカー23の位置誤差を検出する第2画像処理工程とを含む。
(もっと読む)
ロボットの教示装置、及びロボットの制御装置
【課題】部品の種別毎に必要であったロボットの動作範囲や力覚センサ出力の許容範囲に関する作業者の初期設定作業を省略することができ、作業者による教示作業の負担を軽減させることができるロボットの教示装置、及びロボットの制御装置を提供する。
【解決手段】経路教示系127は、被組付ワーク150への組み付けが完了した状態の組付ワーク140をロボットハンド102に把持させ、組付ワーク140に過大な力が作用しないロボットハンド102の位置姿勢を探索しながら、ロボットハンド102に組付ワーク140の引抜動作を実行させる。経路教示系127は、その引抜動作の際に、ロボットハンド102の引抜移動経路を取得する。経路教示系127は、取得した引抜移動経路を時系列逆順に辿る経路を、組付作業経路として生成し、その生成した組付作業経路を動作制御部121に教示する。
(もっと読む)
加工制御装置、レーザ加工装置およびレーザ加工システム
【課題】加工ヘッドの適切な移動速度を短時間で設定できるとともに加工不良を低減することができる加工制御装置を得ること。
【解決手段】レーザを照射することによりワークの3次元レーザ加工を制御する加工制御装置において、ワーク上に設定される加工位置でのワークの面方向と加工ヘッドの加工ノズル方向とがなす角度に基づいて、加工位置での角度に応じた加工ヘッドの移動速度を加工位置毎に設定する移動速度設定部33と、設定された移動速度に従ってワークへの制御指示を出力して3次元レーザ加工を制御する制御指示部35と、を備える。
(もっと読む)
ロボットの制御装置
【課題】ロボット座標上での位置および姿勢を計算しなくとも、実際のロボットの動作時に、教示点を通過する移動軌跡を生成でき、しかも、アームがひっくり返るといった事態を避けるためのロボットの形態チェックをしなくとも済む。
【解決手段】各アームの軸値(回転角)が決まればロボット先端の位置および姿勢は一義的に定まる。これにより、実際にロボットを動作させる際に、前もって連続移動軌跡を求め、求めた連続移動軌跡上の各点のアームの回転角を、教示点でのアームの回転角と比較して教示点に最も近い近傍点を探索する。近傍点が教示点から離れていた場合、教示点を補正し、補正後の教示点を用いて再度連続移動軌跡を軸値で求める。実際にロボットを動かすときには、軸値で求めた連続移動軌跡によりロボットの動作を制御する。
(もっと読む)
ロボットのオフライン教示方法
【課題】ティーチングデータの作成を容易とするロボットのオフライン教示方法を提供する。
【解決手段】ロボットのオフライン教示方法は、複数の仮想教示点を設定するステップ(STEP2)、始点と終点とを含む一部の仮想教示点において仮想ツールの姿勢を設定するステップ(STEP3〜7)、一部の仮想教示点間の補間動作を実行するステップ(STEP8)、補間動作実行時の仮想ツールの位置及び姿勢を所定間隔毎に補間動作点として記憶するステップ(STEP9)、他の仮想教示点毎に、記憶された補間動作点のうち所定の選択基準を満たす補間動作点を選択するステップ(STEP11,12)、他の仮想教示点毎に、選択された補間動作点の姿勢データを読込み、読み込んだ姿勢データを他の仮想教示点の姿勢データとして記憶させるステップ(STEP13〜16)を有する。
(もっと読む)
パラレルメカニズム及びその制御方法
【課題】一般に、パラレルメカニズムは、外力に対する安定性は十分に備えているが、特異点や、ジョイントの動作範囲による制限のためにテーブルの動作角度が十分に取れないという短所がある。
【解決手段】そこで本発明では、ベースとテーブルの間に複数のリニアアクチュエータを回転ジョイントを介して並列に配置したパラレルメカニズムにおいて、リニアアクチュエータは7個以上とし、それらのリニアアクチュエータの動作を制御する制御装置に、適宜選択した6個のリニアアクチュエータのみを能動動作させると同時に、残りのリニアアクチュエータを受動動作させる制御機能を設けたパラレルメカニズムにより上述した課題を解決している。
(もっと読む)
ロボットシステム
【課題】組立嵌合作業の教示の負担を軽減すると共に、嵌合作業の精度を向上させ作業を効率化でき、教示作業時と再生運転時の環境の変化に対するロバスト性を上げることが可能なロボットシステムを提供する。
【解決手段】ロボットコントローラ102は、暫定的に教示されたワーク把持点および嵌合点、ワーク把持点と嵌合点との間の経由点の各位置と、ワーク把持点および嵌合点におけるエンドエフェクタ104の姿勢と、ロボット101周辺に存在する障害物の位置とから障害物を回避して嵌合を行う作業プログラムを生成し、教示データ記憶部1023に記憶させる姿勢演算部1024を備える。
(もっと読む)
1 - 20 / 44
[ Back to top ]