
Fターム[3D232DA28]の内容
走行状態に応じる操向制御 (73,124) | 制御入力信号 (24,979) | 車両運動状態量 (8,041) | 横速度 (52)
Fターム[3D232DA28]に分類される特許
1 - 20 / 52
車両用操舵装置
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するように操舵機構に操舵力を付与する車線逸脱防止制御装置を、自車両の横速度を検出する横速度検出手段と、走行車線からの逸脱を防止する方向へ目標横位置と自車両の横位置との偏差に応じて該偏差が大きくなる程大きい変化量で増加する操舵力を設定する操舵力設定手段と、横速度の増加に応じて走行車線からの逸脱を防止する方向への操舵力を増加補正する操舵力補正手段と、操舵力補正手段によって補正された操舵力に基づいて操舵機構に操舵力を付与する操舵力制御手段とを備える構成とする。
(もっと読む)
車両の操舵制御装置

【課題】荷物の積載状態に拘わらず、安定した制御性能を得ることが可能な車両の操舵制御装置の提供。
【解決手段】車両質量演算部41は、変位センサ36が検出した相対変位HFL,HFR,HRL,HRRを用いて車両の質量を算出する。ヨー慣性モーメント演算部43は、車両質量演算部41が算出した車両の質量からヨー慣性モーメントを算出する。状態フィードバックゲイン演算部44は、車両質量演算部41が算出した車両の質量と、ヨー慣性モーメント演算部43が算出したヨー慣性モーメントIとを用いて、目標操舵角を入力量とする操舵系の状態方程式を設定し、設定した状態方程式に対する評価関数を設定し、設定評価関数を最小とする状態フィードバックゲインを、LQ制御側に従って算出する。目標操舵角演算部45は、算出された状態フィードバックゲインKを用いて、車両を目標進路に従って走行させるための目標操舵角を算出する。
(もっと読む)
車両運動制御装置及びプログラム
【課題】車体合成力の最大値が楕円で制限される場合において、簡単な構成のマップを用いて所望の縦移動距離に対する横移動距離を最大にする軌道及び車体合成力を導出する。
【解決手段】車体合成力の最大値が縦横比γ0の楕円で制限される場合において、車体合成力の最大値及び所望の縦移動距離Xeを設定して、車体合成加速度の最大値の車体前後方向の成分F1/m、縦横比γ0、縦移動距離Xe、自車両の速度の車体前後方向の成分vx0、及び車体横方向の成分vy0により演算される第1及び第2のパラメータと、横移動距離Yeを最大にする軌道を導出するために導入された第1の導入パラメータμ1に関する値、第2の導入パラメータμ2に関する値、及び特定の条件の下、XsとYeとで示される位置に到達する時間との関係を定めたマップを用いて、所望の縦移動距離に対して横移動距離が最大となる軌道及び車体合成力を導出する。
(もっと読む)
操舵支援装置
【課題】障害物が移動する場合であっても適切な操舵支援を行うことができる操舵支援装置を提供する。
【解決手段】障害物の位置情報に基づいて障害物を回避するための操舵支援を行う操舵支援装置1であって、障害物が移動物体であるか否かを判定する障害物情報取得部11と、障害物情報取得部11により障害物が移動物体であると判定された場合には、障害物が静止物体である場合に比べて操舵支援の開始タイミングを遅らせる操舵支援タイミング変更部15と、を備えて構成する。
(もっと読む)
電動油圧式パワーステアリング制御装置
【課題】既存の電動油圧式パワーステアリング装置に新たなセンサを備えることなく適切に端当て状態を検知して、駆動回路の異常な温度上昇を抑制できる電動油圧式パワーステアリング制御装置を提供する。
【解決手段】車速と操舵角速度に基づいて電動モータMの目標回転数を設定するとともに、モータ駆動回路3の温度が閾値温度を超えると目標回転数を低下させる目標回転数設定処理部2Aと、電動モータMの回転数が目標回転数となるようにフィードバック制御するモータ制御部2B,2C,2D,2Eと、電動モータの駆動電流値が所定の電流閾値を超え、且つ、操舵角速度が所定の閾値角速度より低い状態が第1基準時間に設定した判定基準時間継続すると、モータ駆動回路の温度が閾値温度を超える前に、目標回転数を低下させる端当て保護処理部2Fとを備えている。
(もっと読む)
車両用操舵制御装置および車両用操舵制御方法
【課題】高μ路側に接地している車輪の低μ路側への移動を抑制し、車両のヨー方向への回転変位を抑制可能とすること。
【解決手段】ヨーモーメント演算部18が、車両がスプリットμ路を走行しているときに、車輪に制動力が発生した場合、左右の車輪間の当該制動力の差によって車両に発生するヨーモーメントを算出する。また、制動時前後輪舵角演算部21が、ヨーモーメントが第1設定値以上である場合には、前記目標ヨーレイトを低減する。さらに、当該ヨーモーメントが第2設定値未満である場合と比較して、目標横減速度を低減する。
(もっと読む)
車両用操舵制御装置及び車両用操舵制御方法
【課題】車両安定性を向上した車両用操舵制御の技術を提供する。
【解決手段】ステアリングホイール1の操舵角θに応じて演算した目標転舵角α*を目標値として、転舵アクチュエータ5を介して操向輪8を転舵制御する。そして、横加速度YGが所定閾値以上の場合には、横加速度が所定閾値未満の場合と比較して、操舵角の変化に対する目標転舵角の変化を制限する。また、上記所定閾値を、路面摩擦係数が小さい場合、路面摩擦係数が大きい場合に比べて小さくする。
(もっと読む)
挙動制御装置
【課題】車両が旋回走行するとき、車両の挙動に運転者が違和感を持つことを回避できる、挙動制御装置を提供する。
【解決手段】車両が旋回走行する際の目標横加速度を求め、目標横加速度に基づいて目標ヨーレートを求め、車両が旋回走行する際の実ヨーレートを目標ヨーレートに近づけるように車両の挙動を制御する、挙動制御装置において、車両が旋回走行する際の半径に基づいて、将来の横加速度を推定する第1推定手段(ステップS)と、車両における現在の横加速度に基づいて、将来の横加速度を推定する第2推定手段(ステップS2)、と、車両における現在のステアリングホイールの操舵角に基づいて、将来の横加速度を推定する第3推定手段(ステップS3)と、第1推定手段(ステップS1)または第2推定手段(ステップS2)または第3推定手段(ステップS3)により推定された横加速度のうち、最小値を目標横加速度として選択する選択手段(ステップS7)とを備えている。
(もっと読む)
後輪操舵装置
【課題】直進状態のカント路走行時において修正操舵による負担を解消する。
【解決手段】カーナビゲーションからの直進路情報RS信号により直進路走行を判定する直進判定部22と、操舵角θsと車速Vとに基づいて、基準ヨーレイトγfを求めるフィードフォワード部23と、規範ヨーレイトγsを求める規範モデル部24と、規範ヨーレイトから実ヨーレイトγを減算するコンパレータ25と、基準ヨーレイトにコンパレータの結果を加算する加算器27と、加算値に基づいて後輪転舵角δrを求めて駆動制御するアクチュエータ駆動制御部28とを設ける。直進状態のカント路走行時に直進させるべく操舵した場合に、操舵角に応じて後輪を転舵することにより、操舵角を0にしても車両を直進させることができるため、運転者はステアリングホイールをハンドルセンター位置にした操舵力を必要としない楽な状態で直進路を走行することができる。
(もっと読む)
車両制御装置及び車両制御方法
【課題】運転者に違和感を与えることなく車両の安定性を確保することができる車両制御装置及び車両制御方法を提供する。
【解決手段】目標ヨーレートφ´tと目標横速度Vytとに基づいて算出される目標前輪舵角θt及び目標後輪舵角δtに基づいて、前輪操舵アクチュエータ7及び後輪操舵アクチュエータ8を駆動制御して前輪操舵機構12及び後輪操舵機構15を駆動する。また、運転者による緊急操舵を検出したとき、その緊急度(緊急度判定値Kd)が高いほど各輪に付与する制動力を大きく設定する。これにより、緊急操舵時の車両の応答性を確保しつつ安定性を向上することができる。
(もっと読む)
車両制御装置及び車両制御方法
【課題】緊急操舵時における車両の安定性を確保することができる車両制御装置及び車両制御方法を提供する。
【解決手段】目標ヨーレートφ´tと目標横速度Vytとに基づいて算出される目標前輪舵角θt及び目標後輪舵角δtに基づいて、前輪操舵機構12及び後輪操舵機構15を駆動する。また、運転者による緊急操舵を検出したとき、その緊急度(緊急回避操作度合Ks)が高いほど車両挙動を安定化するように目標値(目標横加速度、目標ヨーレート)を大きく減少補正する。そして、補正した目標値を実現するような目標ヨーモーメントYawmを発生するようにブレーキ制御を作動する。
(もっと読む)
車両制御装置
【課題】例えばリアステア等の転舵機構を備える車両制御装置において、車輪の転舵を効率的に可能ならしめ、省スペース化を図る。
【解決手段】車両制御装置は、車輪(3)の転舵を行う転舵機構(11)及び車輪に設けられた可変サスペンション(12)を有する車両を制御する。車両制御装置は、車輪及び車両の本体(10)が相互に干渉する危険性を示す所定パラメータの値を特定する特定手段(31)と、転舵が行われる際に、特定された所定パラメータの値に応じて、可変サスペンションの動作に制限を加えるように、可変サスペンションを制御する制御手段(35)とを備える。
(もっと読む)
操舵装置
【課題】トレーラ牽引時に操舵フィールが悪化せず、走行安定性に優れた操舵装置を提供する。
【解決手段】電動パワーステアリング装置は、車両のヨーレートを検出するヨーレートセンサ18と、ヨーレートセンサ18により検知された車両のヨーレートに応じて補助反力トルクを制御する補助反力トルク決定手段32と、車両がトレーラを牽引している状態を検知するトレーラ連結スイッチ22とを備える。トレーラ連結スイッチ22がトレーラの牽引を検知した場合には、補助反力トルク決定手段32により決定される制御量(すなわち、補助反力トルク)を低減させる。
(もっと読む)
車両用操舵角制御装置
【課題】より高精度に操舵角を制御することが可能な車両用操舵角制御装置を提供すること。
【解決手段】左右の車輪の操舵角を独立して操作可能な車両に搭載される車両用操舵角制御装置であって、車体のロール角を検出するロール角検出手段と、該ロール角検出手段により検出された車体のロール角に起因する車輪のスリップ角を算出し、該算出した車体のロール角に起因する車輪のスリップ角を加味して左右の車輪の操舵角補正量を決定する操舵角補正量決定手段と、を備える車両用操舵角制御装置。
(もっと読む)
車両逸脱防止装置
【課題】車線の認識が困難な場合であっても適切な車両逸脱防止制御を行える車両逸脱防止装置を提供する。
【解決手段】自車両OVと先行車LVの位置関係に基づきドライバに逸脱防止警報を行う車両逸脱防止装置を、先行車を含む自車両前方の環境を認識する環境認識手段110と、環境認識手段を用いて自車両と先行車との位置関係を演算する先行車位置演算手段120と、自車両と先行車の位置関係に基づいて先行車の走行軌跡に沿って自車両を進行させるのに必要な目標操舵量を演算する目標操舵量演算手段130と、自車両の実操舵量を検出する実操舵量検出手段150と、目標操舵量と実操舵量との偏差Δeが所定の閾値Δe_th以上となった際に、逸脱防止警報を行う警報制御手段160、170とを備える構成とする。
(もっと読む)
自動車の車両姿勢制御装置及び制御方法
【課題】タイヤに発生するタイヤ横力を直接検出し、当該タイヤ横力情報を用いて、指令値の追従性能を向上させるための自動車の車両姿勢制御装置及び制御方法を提供すること。
【解決手段】本発明に係る車両姿勢制御装置は、自動車の前後輪に装着された2つのタイヤ横力センサ内蔵ハブユニットであって、そのハブユニットの軸受に作用する荷重から前後輪のタイヤ横力を検出する2つのタイヤ横力センサ内蔵ハブユニットと、2つのタイヤ横力センサ内蔵ハブユニットから検出された前後輪のタイヤ横力、自動車の車両重心から前後輪軸の距離、及び自動車の左右の駆動力差を用いたヨーモーメント間の所定の関係式を用いてヨーレートを制御するヨーレート制御手段とを備える。
(もっと読む)
操舵制御装置
【課題】車両のオフセットが大きい場合でも適切な操舵制御が行える操舵制御装置を提供すること。
【解決手段】車両の進行方向前方に目標位置を設定しその目標位置を車両が走行するように操舵制御を行う操舵制御装置であって、車両の車線中心位置からのオフセット量を演算し(S12)、オフセット量が大きいほど車両から離れた位置に目標位置を設定し(S14)、その目標位置に応じて制御トルクを演算して操舵制御を行う(S18、S20)。これにより、車両を操舵制御によって車線中心位置に戻す際、オフセット量が大きい場合に制御トルクが大きく設定されることが抑制され、操舵制御によって車両の運転者が違和感を覚えることを抑制できる。
(もっと読む)
車両挙動制御装置
【課題】 前輪の縁石乗上げ時等における好ましくない車両挙動を抑制した車両挙動制御装置を提供する。
【解決手段】 前輪3fl,3frの縁石への乗り上げや陥没への落ち込みが起こり、ステップS2の判定がYesになると、操舵ECU7は、ステップS3でサスペンション4fl,4frの変位による前輪3fl,3frのトー角変化量を求めた後、ステップS4でこのトー角変化によるヨーモーメントおよび横力の増減量を算出する。次に、操舵ECU7は、ステップS3の算出結果に基づき、ステップS5でヨーモーメントおよび横力の増減を相殺する(すなわち、旋回を助長あるいは抑制する)ための転舵角補償値δcl,δcrを設定する。しかる後、操舵ECU7は、ステップS6で転舵角補償値δcl,δcrによって前述の後輪舵角δrl,δrrを補正する。
(もっと読む)
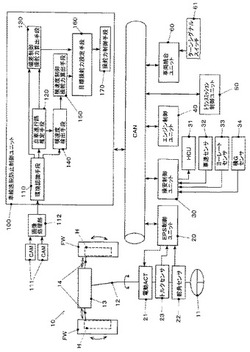
車線逸脱防止制御装置
【課題】突発的な外乱が生じた場合であっても車線逸脱を防止できる車線逸脱防止制御装置を提供する。
【解決手段】自車両の走行車線からの逸脱を防止するよう操舵機構10に操舵力を付与する車線逸脱防止制御ユニット100を、走行車線に対する自車両の横速度を検出する横速度検出手段140と、走行車線内に設定した目標横位置Xcと自車両の横位置Xeとの偏差ΔXを積分することにより、走行車線からの逸脱を防止する方向へ第1の操舵力を設定する第1の操舵力設定手段(偏差制御操舵力算出手段)130と、横速度に基づいて走行車線からの逸脱を防止する方向へ第2の操舵力を設定する第2の操舵力設定手段(横速度制御操舵力算出手段)150と、第1の操舵力と第2の操舵力に基づいて目標操舵力を設定する目標操舵力設定手段160と、操舵機構に操舵力を付与する操舵力制御手段170とを備える構成とする。
(もっと読む)
1 - 20 / 52
[ Back to top ]